ELMO MDS控制器编程入门指南
需积分: 5 187 浏览量
更新于2024-09-08
4
收藏 1007KB DOC 举报
"这篇文档是针对ELMO的MDS控制器编程的一个教程,主要面向初学者,作者Michael贾分享了他在科研中的经验总结。教程要求读者具备基本的C语言基础,并通过文档提供的框架来学习和实践ELMO控制器的编程。文档涉及到的关键技术包括ELMO控制器的使用、电机控制、机器人控制以及C++编程。"
在ELMO的MDS控制器编程中,了解程序的基本架构至关重要。文档中提到的主要程序流程始于`main()`函数,它首先调用`MainInit()`进行所有必要的初始化工作,如设置硬件接口、配置参数等。`MainInit()`的具体实现会在相关的手册示例中详述。初始化完成后,程序会进入`MachineSequences()`函数,这是一个关键的环节,它负责启动机器的运行序列和运动控制。
`MachineSequences()`函数采用状态机设计模式,确保高效执行。状态机的结构在文档中用图2进行了展示。特别需要注意的是,状态机中的红色代码块要求快速执行,不应当包含可能导致长时间阻塞或者延迟的操作。这部分代码应是无条件的、有限次的执行,以保证程序的实时性和响应性。
`MachineSequences()`首先调用`MachineSequencesInit()`初始化所有必要的变量,并开启`MachineSequencesTimer()`定时器。`EnableMainTimer(TIMER_CYCLE)`被调用,其中`TIMER_CYCLE`是由程序员在头文件中定义的常量,通常设为20毫秒。这意味着`MachineSequencesTimer()`函数会被操作系统每20毫秒调用一次,用于处理和管理状态机的运行。
接下来,`MachineSequences()`陷入一个无限的`while`循环,等待全局变量`giTerminate`的标志来决定何时结束程序。`giTerminate`被设置为终止请求时,`MachineSequencesTimer()`会停止执行,从而结束整个机器运行序列。
整个教程通过这样的方式逐步引导读者理解ELMO控制器如何通过C++编程来实现复杂的运动控制任务,为机器人控制和电机控制提供了清晰的实现路径。对于初次接触ELMO控制器的开发者,这将是一个宝贵的参考资料。
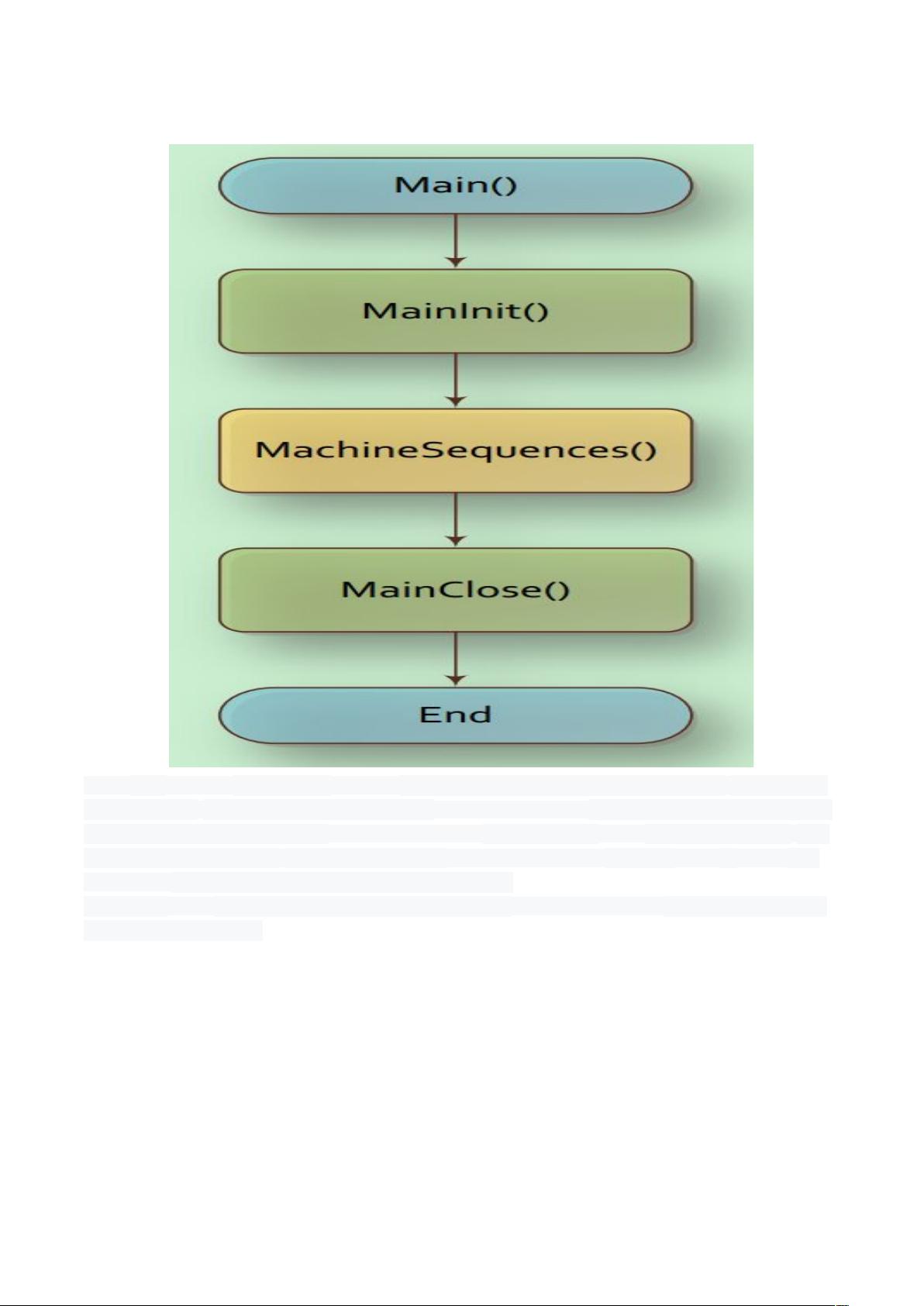
首先让我们来了解一下 main()函数程序架构,如下图 1 所示:
main()以对 MainInit()的调用开始,MainInit()是一个函数,它执行所有程序和系统的初始化(稍后将在手册
示例中详细介绍)。在完成所有初始化之后,调用 MachineSequences()函数。该函数有意地启动机器序列
和运动的执行。在机器运行期间,MachineSequences()函数不会返回到 main(),直到程序请求终止(由于
错误,用户请求关闭,等等)。当机器操作完成时,machine Sequences()函数返回 main(), main()调用
MainClose()函数来关闭程序终止之前需要关闭的所有内容。
这是程序的 main()函数。尽可能简单和干净。现在我们进入 MachineSequences()函数,使用状态机结构
来查找机器序列的实现。
下图 2 是关于 machineSequences()函数介绍:
下载后可阅读完整内容,剩余8页未读,立即下载
2014-09-25 上传
2021-03-21 上传
2019-09-05 上传
2020-07-24 上传
2024-01-18 上传
2021-11-28 上传
125 浏览量

Michael_贾
- 粉丝: 6
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
