水下滑翔机海洋观测控制策略与特征跟踪研究
版权申诉
115 浏览量
更新于2024-06-29
收藏 31.13MB PDF 举报
"水下滑翔机海洋特征观测控制策略研究"
这篇文档主要探讨了水下滑翔机在海洋特征观测中的控制策略。水下滑翔机是一种新型的无人水下航行器,因其能源效率高、续航时间长而被广泛用于海洋科学研究和环境监测。论文首先介绍了研究背景和意义,强调了海洋自主观测在环境保护、资源勘探和天气预报等方面的重要性。接着,对水下滑翔机的国内外研究现状进行了综述,包括其发展历史、动力学建模与控制技术的最新进展。
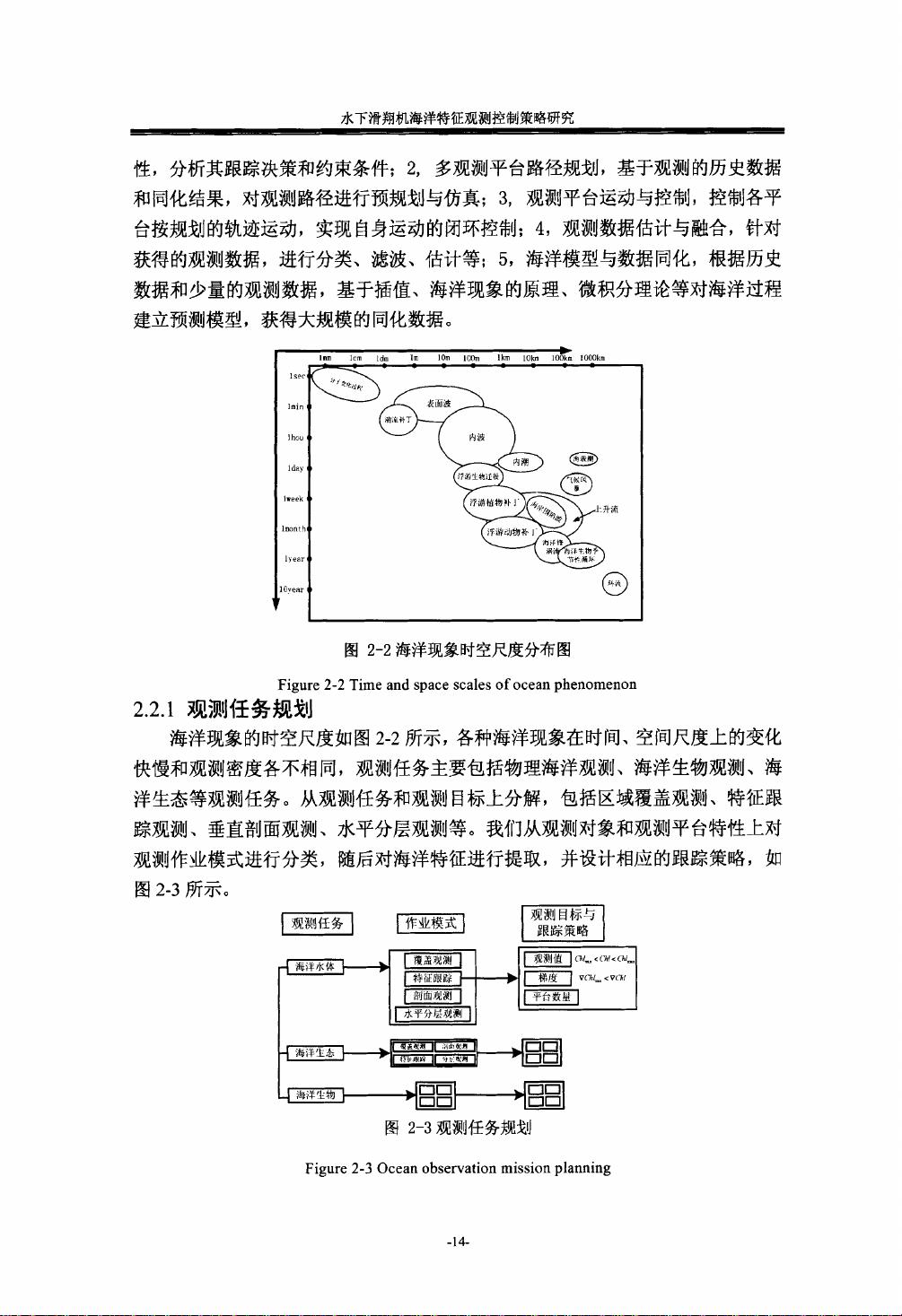
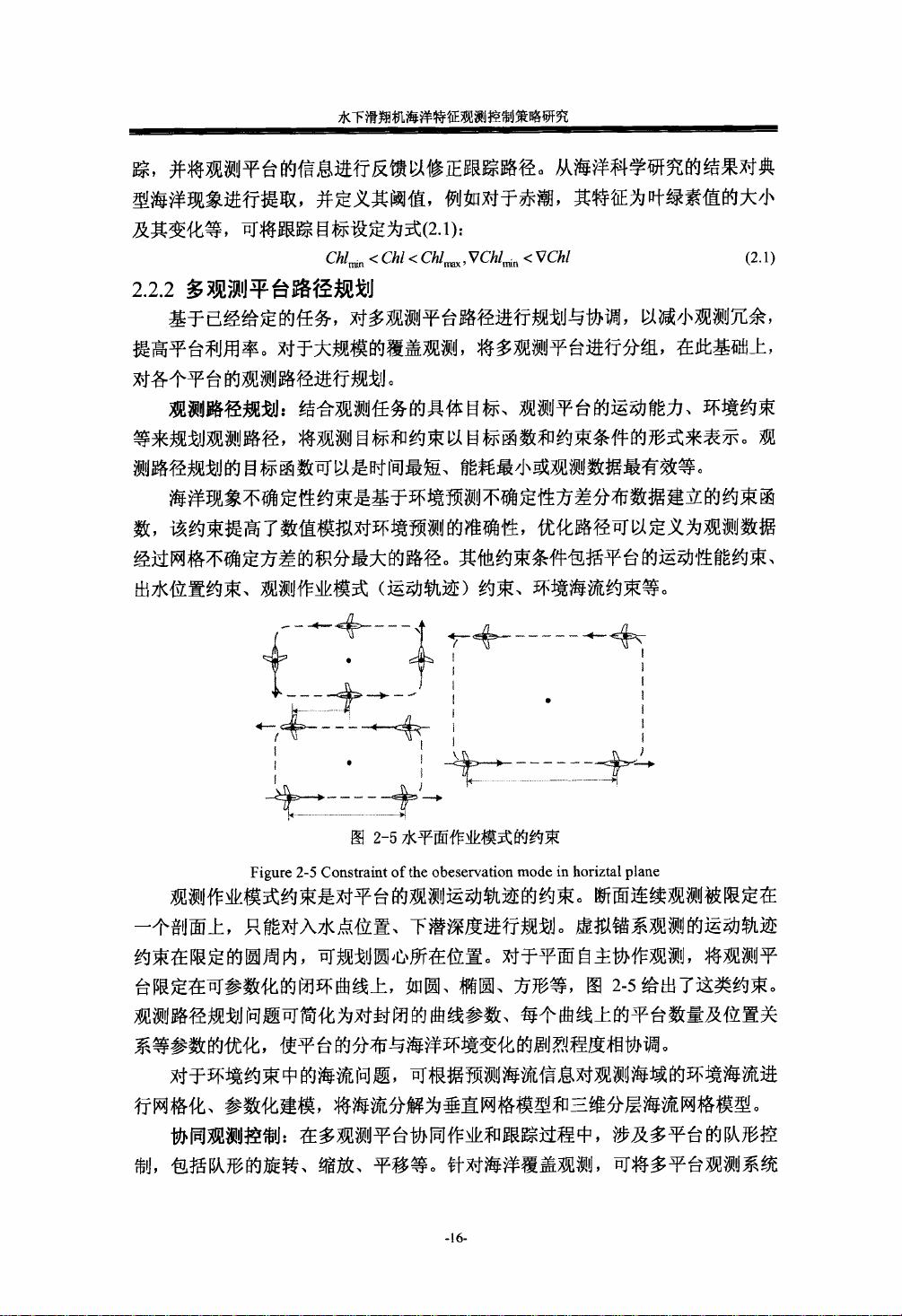
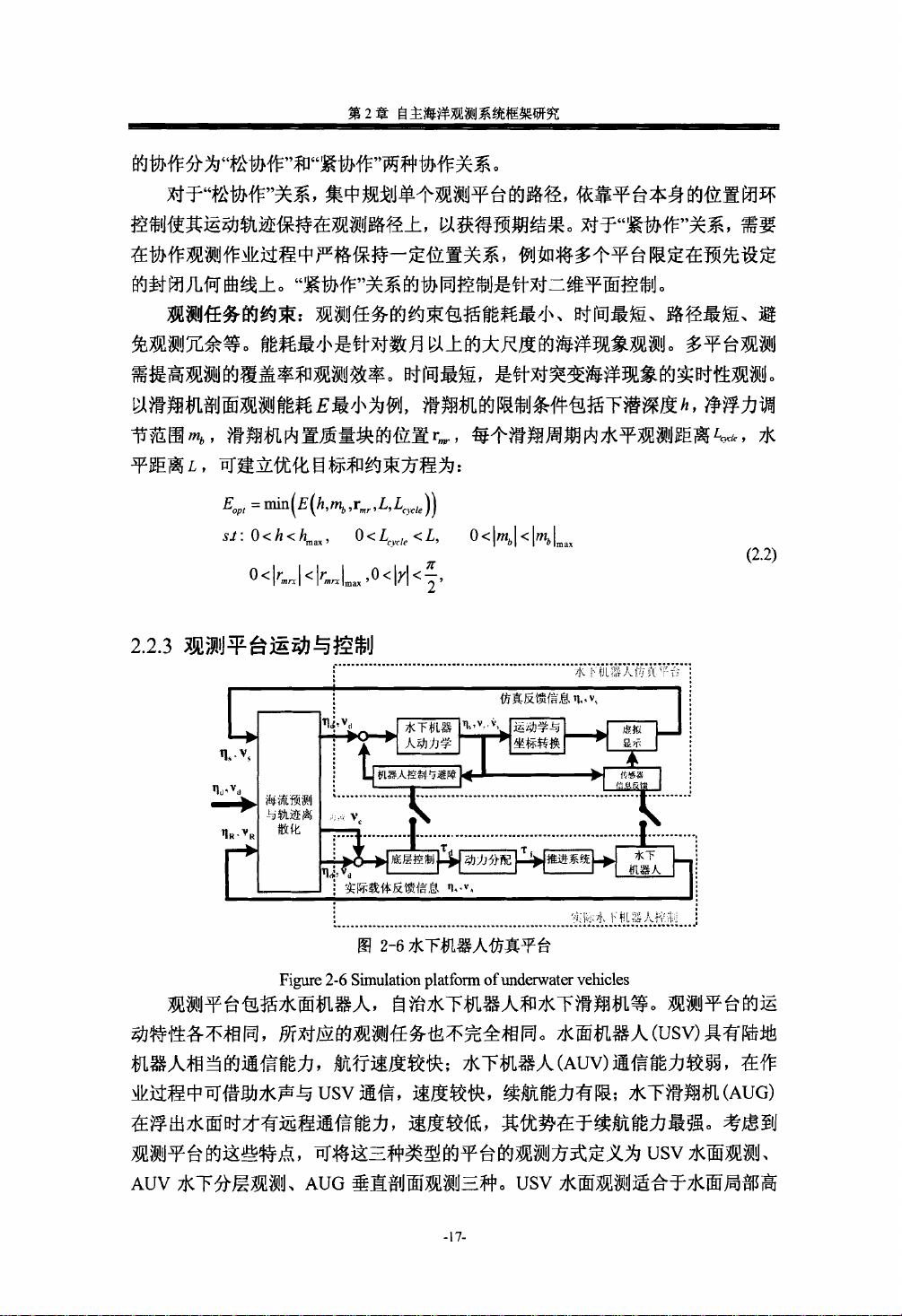
文档详细阐述了海洋环境观测的关键技术,如观测系统的任务规划、多平台路径规划、运动与控制、数据估计与融合,以及海洋模型与数据同化。这些技术是确保水下滑翔机有效执行观测任务的基础。特别是,对于多观测平台的路径规划,作者可能讨论了如何优化多个水下滑翔机协同工作,以覆盖更广阔的海洋区域并提高观测效率。
在特征跟踪研究部分,论文可能深入探讨了如何利用水下滑翔机实时追踪海洋中的特定现象,如温度、盐度、流速等关键参数。这涉及到了近实时处理和分析观测数据的技术,以实现对动态海洋环境的精确监控。
此外,文档还关注了海洋特征剖面观测,这是理解海洋垂直结构和变化的关键。作者可能提出了新的控制策略,使得水下滑翔机能够在不同深度进行高效且准确的测量,同时克服水下环境的挑战,如压力变化和通信限制。
最后,论文通过各章节的小结,总结了研究的主要成果和创新点,为后续的研究提供了方向。整篇文档深入研究了水下滑翔机在海洋观测中的应用,不仅涵盖了理论分析,也包含了实践策略,对水下机器人技术和海洋科学领域具有重要的参考价值。

剩余120页未读,继续阅读
2022-12-20 上传
689 浏览量
2021-08-08 上传
2021-09-28 上传
347 浏览量
2021-08-14 上传
271 浏览量

每天读点书学堂
- 粉丝: 1043
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- apiAutocomNFSe
- ekrtf304_d7_delphi_rtf_3娱d7com_
- mysql-installer-community-8.0.22.0.msi.zip
- blomqvist:布隆奎斯特
- zsnap:Linux上用于ZFS的自动简单快照工具
- 记分卡:安全记分卡-开源的安全健康指标
- 用HTML5编写乐谱
- java项目实战练习小项目
- typed-manifest:对标准 Java META-INFMANIFEST.MF 的类型安全访问
- firefox-to-deepl:Firefox扩展。 突出显示网页上的文本并将其发送到DeepL
- 关于车辆到行人通信系统及其使用方法的介绍说明.rar
- 基于串口通信的上位机控制软件.rar
- Week5:网络编程
- t-angular-boilerplate-keycloak
- svelte-localstorage::warning:尚未就绪:warning:自动与localStorage同步的Svelte可写存储
- matlab个人练习上手视觉项目
