




基于稀疏表示的鲁棒人脸识别方法
"Robust Face Recognition via Sparse Representation" 是一篇关注人脸识别技术的学术论文,由John Wright、Allen Y. Yang、Arvind Ganesh、S. Shankar Sastry和Yi Ma等多位IEEE会员共同撰写。论文的核心观点是将人脸识别问题视为在多个线性回归模型间进行分类,并强调了稀疏信号表示理论在解决这个问题中的关键作用。通过1-范数最小化方法计算得到的稀疏表示,作者提出了一种通用的基于图像的对象识别算法。
在这个新框架下,论文探讨了人脸识别中的两个关键挑战:特征提取和对遮挡的鲁棒性。首先,作者指出,以往对于特征选择的依赖度降低,因为当正确地利用稀疏性时,特征选择的重要性变得不那么显著。然而,特征的数量是否足够以及稀疏表示的准确性成为了新的关注点。这意味着在设计算法时,不仅要关注特征选择的质量,还要确保有足够的特征来捕捉人脸的复杂性,并且算法应能处理不同表情、光照条件下的变化,以及面部遮挡的情况。
此外,论文可能还探讨了如何通过稀疏编码技术(如非负矩阵分解或者稀疏编码器)来提取人脸的特征向量,这些特征向量能够有效地压缩并保留人脸的识别关键信息,即使在存在噪声或遮挡的情况下也能保持较高的识别精度。这种鲁棒性是通过减少冗余信息和增强对异常模式的抵抗实现的。
为了实现算法的实用性,文中可能会提供具体的实现步骤和实验结果,包括训练数据集的选择、特征提取和降维技术、以及与传统方法(如PCA、LDA等)的性能比较。可能还会讨论如何通过迭代优化算法(如ISTA或ADMM)求解1-范数最小化问题,以找到最合适的稀疏表示。
这篇论文将稀疏表示理论应用于人脸识别领域,提出了一个创新的分类框架,强调了稀疏性在特征提取和应对遮挡等复杂情况下的优势。其研究不仅推动了人脸识别技术的发展,也为其他领域的信号处理提供了新的思考角度。如果提供了代码,读者可以借此深入理解并实现这一鲁棒的稀疏表示人脸识别算法。
As the entries of the vector xx
0
encode the identity of the
test sample yy, it is tempting to attempt to obtain it by
solving the linear system of equations yy ¼ Axx. Notice,
though, that using the entire training set to solve for xx
represents a significant departure from one sample or one
class at a time methods such as NN and NS. We will later
argue that one can obtain a more discriminative classifier
from such a global representation. We will demonstrate its
superiority over these local methods (NN or NS) both for
identifying objects represented in the training set and for
rejecting outlying samples that do not arise from any of the
classes present in the training set. These advantages can
come without an increase in the order of growth of the
computation: As we will see, the complexity remains linear
in the size of training set.
Obviously, if m>n, the system of equations yy ¼ Axx is
overdetermined, and the correct xx
0
can usually be found as
its unique solution. We will see in Section 3, however, that
in robust face recognition, the system yy ¼ Axx is typically
underdetermined, and so, its solu tion is not unique.
6
Conventionally, this difficulty is resolved by choosing the
minimum ‘
2
-norm solution:
ð‘
2
Þ :
^
xx
2
¼ arg min kxxk
2
subject to Axx ¼ yy: ð4Þ
While this optimization problem can be easily solved (via
the pseudoinverse of A), the solution
^
xx
2
is not especially
informative for recognizing the test sample yy. As shown in
Example 1, ^xx
2
is generally dense, with large nonzero entries
corresponding to training samples from many different
classes. To resolve this difficulty, we instead exploit the
following simple observation: A valid test sample yy can be
sufficiently represented using only the training samples
from the same class. This representation is naturally sparse if
the number of object classes k is reasonably large. For
instance, if k ¼ 20, only 5 percent of the entries of the
desired xx
0
should be nonzero. The more sparse the
recovered xx
0
is, the easier will it be to accurately determine
the identity of the test sample yy.
7
This motivates us to seek the sparsest solution to yy ¼ Axx,
solving the following optimization problem:
ð‘
0
Þ :
^
xx
0
¼ arg min kxxk
0
subject to Axx ¼ yy; ð5Þ
where kk
0
denotes the ‘
0
-norm, which counts the number
of nonzero entries in a vector. In fact, if the columns of A are
in general position, then whenever yy ¼ Axx for some xx with
less than m=2 nonzeros, xx is the unique sparsest solution:
^
xx
0
¼ xx [33]. However, the problem of finding the sparsest
solution of an underdetermined system of linear equations is
NP-hard and difficult even to approximate [13]: that is, in the
general case, no known procedure for finding the sparsest
solution is significantly more efficient than exhausting all
subsets of the entries for xx.
2.2 Sparse Solution via ‘
1
-Minimization
Recent development in the emerging theory of sparse
representation and compressed sensing [9], [10], [11] reveals
that if the solution xx
0
sought is sparse enough, the solution of
the ‘
0
-minimization problem (5) is equal to the solution to
the following ‘
1
-minimization problem:
ð‘
1
Þ :
^
xx
1
¼ arg min kxxk
1
subject to Axx ¼ yy: ð6Þ
This problem can be solved in polynomial time by standard
linear programming methods [34]. Even more efficient
methods are available when the solution is known to be
very sparse. For example, homotopy algorithms recover
solutions with t nonzeros in Oðt
3
þ nÞ time, linear in the size
of the training set [35].
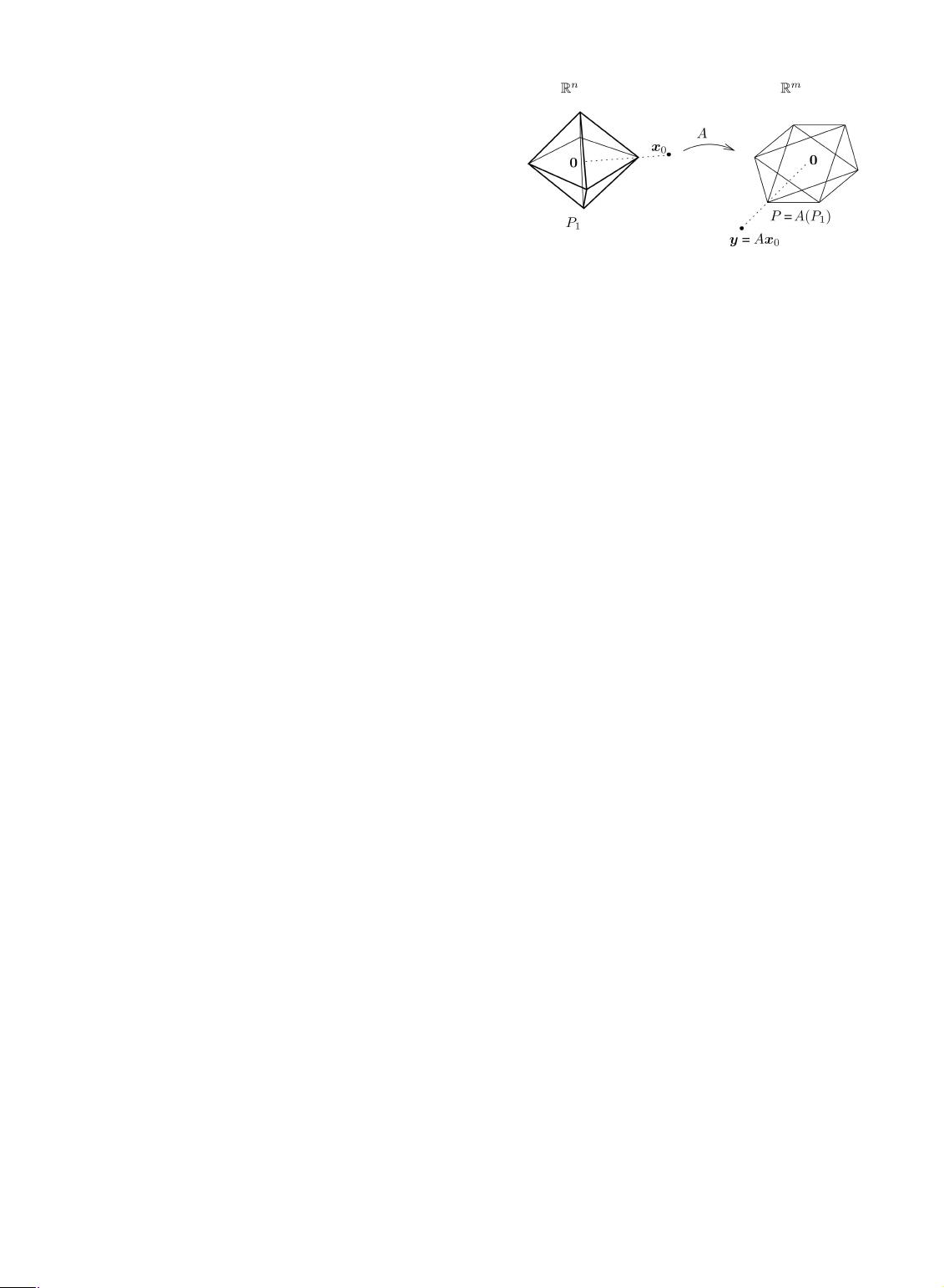
2.2.1 Geometric Interpretation
Fig. 2 gives a geometric interpretation (essentially due to
[36]) of why minimizing the ‘
1
-norm correctly recovers
sufficiently sparse solutions. Let P
denote the ‘
1
-ball (or
crosspolytope) of radius :
P
¼
:
fxx : kxxk
1
gIR
n
: ð7Þ
In Fig. 2, the unit ‘
1
-ball P
1
is mapped to the polytope
P¼
:
AðP
1
ÞIR
m
, consisting of all yy that satisfy yy ¼ Axx for
some xx whose ‘
1
-norm is 1.
The geometric relationship between P
and the polytope
AðP
Þ is invariant to scaling. That is, if we scale P
, its
image under multiplication by A is also scaled by the same
amount. Geometrically, finding the minimum ‘
1
-norm
solution
^
xx
1
to (6) is equivalent to expanding the ‘
1
-ball P
until the polytope AðP
Þ first touches yy. The value of at
which this occurs is exactly k
^
xx
1
k
1
.
Now, suppose that yy ¼ Axx
0
for some sparse xx
0
. We wish
to know when solving (6) correctly recovers xx
0
.This
question is easily resolved from the geometry of that in
Fig. 2: Since
^
xx
1
is found by expanding both P
and AðP
Þ
until a point of AðP
Þ touches yy, the ‘
1
-minimizer
^
xx
1
must
generate a point A
^
xx
1
on the boundary of P .
Thus,
^
xx
1
¼ xx
0
if and only if the point Aðxx
0
=kxx
0
k
1
Þ lies on
the boundary of the polytope P. For the example shown in
Fig. 2, it is easy to see that the ‘
1
-minimization recovers all
xx
0
with only one nonzero entry. This equivalence holds
because all of the vertices of P
1
map to points on the
boundary of P.
In general, if A maps all t-dimensional facets of P
1
to
facets of P , the polytope P is referred to as (centrally)
t-neighborly [36]. From the above, we see that the
‘
1
-minimization (6) correctly recovers all xx
0
with t þ 1
nonzeros if and only if P is t-neighborly, in which case, it is
WRIGHT ET AL.: ROBUST FACE RECOGNITION VIA SPARSE REPRESENTATION 213
Fig. 2. Geometry of sparse representation via ‘
1
-minimization. The
‘
1
-minimization determines which facet (of the lowest dimension) of the
polytope AðP
Þ, the point yy=kyyk
1
lies in. The test sample vector yy is
represented as a linear combination of just the vertices of that facet, with
coefficients xx
0
.
6. Furthermore, even in the overdetermined case, such a linear equation
maynotbeperfectlysatisfiedinthepresenceofdatanoise(see
Section 2.2.2).
7. This intuition holds only when the size of the database is fixed. For
example, if we are allowed to append additional irrelevant columns to A,
we can make the solution xx
0
have a smaller fraction of nonzeros, but this
does not make xx
0
more informative for recognition.
下载后可阅读完整内容,剩余17页未读,立即下载
相关推荐



416 浏览量
295 浏览量

shuanger1233
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开








最新资源
- PADS 2007优化PCB设计流程及制板小窍门
- Wince下实现WiFi通信的源代码解析
- 光敏电阻传感器测试程序的开发与应用
- HTML实践技巧与案例分析
- 多信道蜂窝系统中D2D功率分配的快速优化算法研究
- 7Z SFX Builder 2.1:自解压包的终极解决方案
- OSGi与Spring Virgo整合实现Web应用演示
- Windows10Defender概念UWP皮肤版ARM官方发布
- Adobe AIR源代码深度解析与应用指南
- Google App Engine Java 中文官方文档下载指南
- 《编译原理》PDF下载:软件编译参考指南
- Mob研究院深度解析2020年「后浪」消费趋势
- gsh: Gravel Project交互式外壳探索
- 汇编语言程序设计课程详细教案
- STL教程完整指南:ACM与C++编程必备
- ASP网络精品课程管理系统源码下载分享






















