多旋翼飞行器坐标系与姿态表示:从欧拉角到四元数
下载需积分: 11 | PDF格式 | 2.03MB |
更新于2024-07-09
| 174 浏览量 | 举报
"四元数计算,坐标系和姿态表示的讲解,包括地球固联坐标系与机体坐标系"
在多旋翼飞行器的设计与控制中,理解坐标系和姿态表示是至关重要的。本讲主要涵盖了四种关键概念:坐标系、欧拉角、旋转矩阵和四元数。
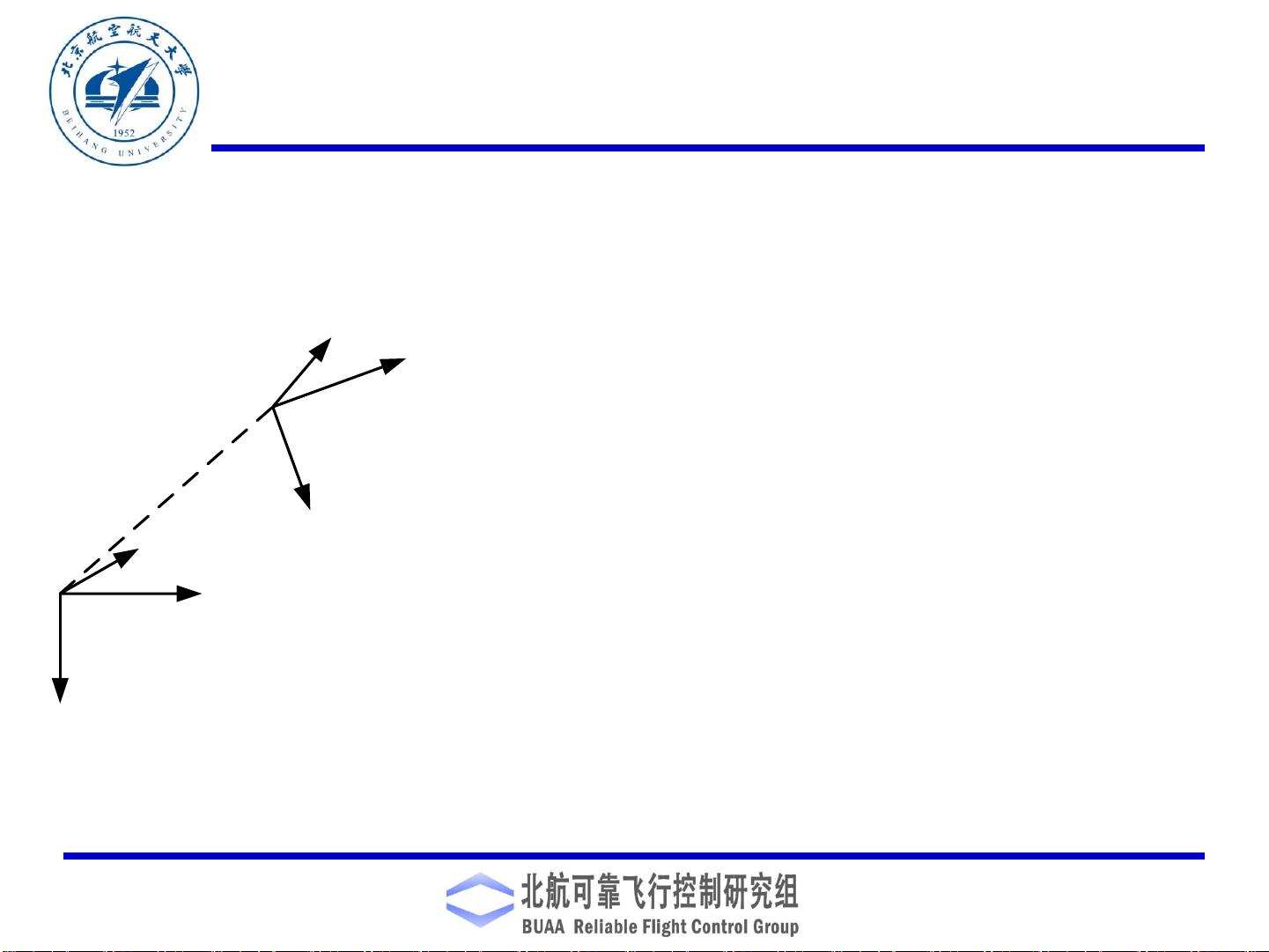
首先,坐标系的定义是研究飞行器运动的基础。通常使用两种坐标系,即地球固联坐标系和机体坐标系。地球固联坐标系(e)用于描述飞行器相对于地面的位置和运动,它的原点可以设定在起飞位置或地心,其中x轴指向某一固定方向,y轴通过右手定则确定,而z轴垂直于地面向下。而机体坐标系(b)则是与飞行器固连的,原点位于飞行器重心,x轴指向机头方向,y轴在飞机对称平面内且垂直于x轴,z轴同样通过右手定则确定。
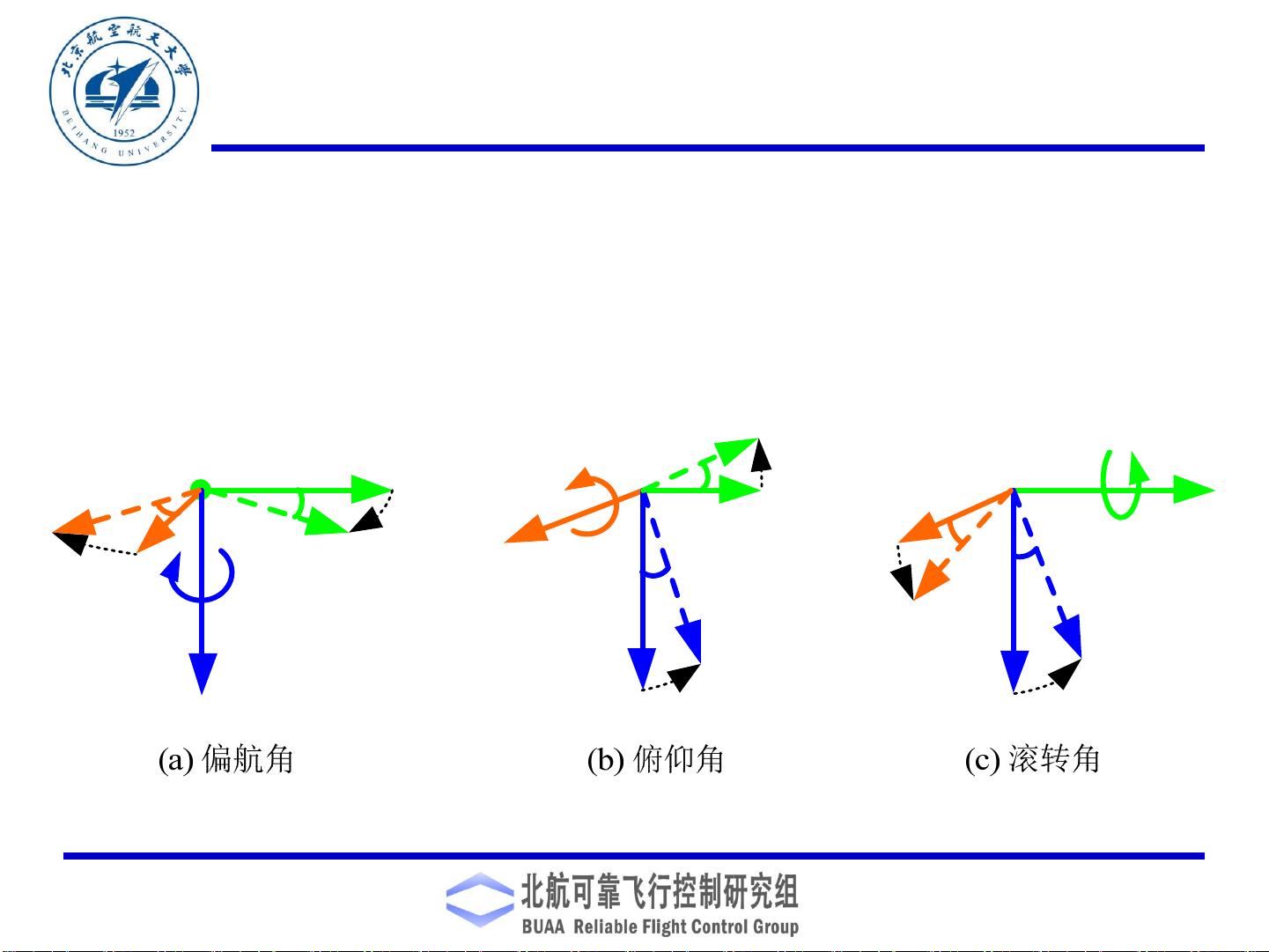
接下来,欧拉角是一种常用的姿态表示方法,它通过三个角度来描述物体相对于参考坐标系的旋转。常见的欧拉角有多种组合,如俯仰(pitch)、翻滚(roll)和偏航(yaw),分别对应于绕z、x和y轴的旋转。欧拉角的缺点在于存在所谓的万向节死锁(gimbal lock)问题,当两个连续的旋转轴重合时,会导致姿态描述不完整。
旋转矩阵是另一种描述三维空间旋转的方法,它是一个3x3的正交矩阵,表示一个从原坐标系到新坐标系的线性变换。每个旋转矩阵对应一个特定的旋转角度和轴,可以将欧拉角转换为旋转矩阵,反之亦然。旋转矩阵满足乘法性质,可以表示连续的旋转。
四元数是一种更有效的表示三维旋转的数学工具,它克服了欧拉角的万向节死锁问题。四元数由一个实部和三个虚部组成,形式为(q0, q1, q2, q3),其中q0是实部,q1, q2, q3是虚部。四元数乘法规则可以方便地描述和组合旋转,而且四元数的模长始终保持为1,这有助于保持旋转的保距性。将四元数与旋转矩阵相比,四元数在计算上更为高效,特别是在处理大量旋转操作时。
本讲的小结强调了这些概念在多旋翼飞行器控制中的应用。了解和熟练掌握这些坐标变换和姿态表示方法,对于设计飞行控制器、实现精准定位以及执行复杂的飞行任务至关重要。无论是欧拉角、旋转矩阵还是四元数,它们都有各自的优势和适用场景,选择合适的方法取决于具体的应用需求和计算效率。在实际工程中,通常会结合使用这些工具,以实现最优的控制效果。
ee e
123
,,bbb
123
,,eee
123
100
0, 1, 0
001
eee
1.坐标系
2017/3/20
7
地球固联坐标系与机体坐标系定义
e
o
e
x
e
y
e
z
b
o
b
x
b
y
b
z
图 5.2 机体坐标系与
地面坐标系的关系图
定义如下三个单位向量
在地球固联坐标系中,沿着轴 的单位向量可
以表示为 。在机体坐标系下,沿着 轴的
单位向量满足(注:左上标b表示向量在机体坐标系的表示)
eee
,,
x
yz
b
bb
,,
xy
z
bb b
112 2 33
,,
bebebe
在地球固联坐标系中,沿着 轴的单位向量表示为
b
bb
,,
xy
z
(注:左上标e表示向量在地球固联坐标系的表示)
剩余38页未读,继续阅读
相关推荐




laocui1
- 粉丝: 1448
 我的内容管理
展开
我的内容管理
展开







最新资源
- 自动生成CAD模型文件的测试流程
- 掌握JavaScript中的while循环语句
- 宜科高分辨率编码器产品手册解析
- 探索3CDaemon:FTP与TFTP的高效传输解决方案
- 高效文件对比系统:快速定位文件差异
- JavaScript密码生成器的设计与实现
- 比特彗星1.45稳定版发布:低资源占用的BT下载工具
- OpenGL光源与材质实现教程
- Tablesorter 2.0:增强表格用户体验的分页与内容筛选插件
- 设计开发者的色值图谱指南
- UYA-Grupo_8研讨会:在DCU上的培训
- 新唐NUC100芯片下载程序源代码发布
- 厂家惠新版QQ空间访客提取器v1.5发布:轻松获取访客数据
- 《Windows核心编程(第五版)》配套源码解析
- RAIDReconstructor:阵列重组与数据恢复专家
- Amargos项目网站构建与开发指南
