MCP2515: SPI转CAN接口高速协议详解
需积分: 9 192 浏览量
更新于2024-07-17
1
收藏 1.2MB PDF 举报
MCP2515是一款专为CAN总线通信设计的高性能接口芯片,由Microchip Technology Inc.在2003年至2012年期间开发。该芯片的主要特点包括:
1. **CAN V2.0兼容性与高速支持**: MCP2515能够实现高达1Mbps的数据传输速率,支持标准和扩展数据帧以及远程帧,数据字段长度可变,范围从0到8字节。
2. **接收缓冲区与过滤功能**: 提供两个优先级存储的接收缓冲器,每个缓冲器有29位的过滤器,总共可以设置6个过滤条件。数据字节过滤仅对标准数据帧的前两个字节有效。
3. **多级发送缓冲与中断功能**: 三个发送缓冲区支持优先级和取消发送功能,确保消息发送的一次性尝试。中断输出可用于接收缓冲器满或特定事件发生时。
4. **高速SPI接口**: 采用灵活的SPI模式0、1,速度可达10MHz,适用于高效的数据交换。
5. **单次发送模式** (One-Shot mode): 确保每个消息只发送一次,避免重复传输。
6. **时钟输出与可编程分频**: 提供一个可编程分频的时钟输出,作为其他设备的时钟源,增加了系统的灵活性。
7. **SOF信号监测**: SOF信号可用作时间槽协议或诊断工具,用于早期检测总线性能下降。
8. **可配置中断输出与控制**:中断输出可以独立设置,也可用作通用目的输出,而请求发送(RTS)输入可以分别配置为控制每个发送操作的信号。
9. **发送控制选项**: RTS输入可以被配置为每个发送操作的控制信号,提供更精细的控制。
MCP2515是CAN总线应用的理想选择,它集成了多种高级功能,支持高效、可靠的数据传输和管理,适用于需要CAN通信的嵌入式系统设计,如工业自动化、汽车电子、物联网等场景。通过合理的配置和使用,开发人员能够充分利用MCP2515的优势,提高系统性能和可靠性。
2003-2012 Microchip Technology Inc. DS21801G-page 15
MCP2515
3.0 MESSAGE TRANSMISSION
3.1 Transmit Buffers
The MCP2515 implements three transmit buffers. Each
of these buffers occupies 14 bytes of SRAM and are
mapped into the device memory map.
The first byte, TXBnCTRL, is a control register
associated with the message buffer. The information in
this register determines the conditions under which the
message will be transmitted and indicates the status of
the message transmission (see Register 3-2).
Five bytes are used to hold the standard and extended
identifiers, as well as other message arbitration
information (see Register 3-4 through Register 3-7).
The last eight bytes are for the eight possible data
bytes of the message to be transmitted (see
Register 3-8).
At a minimum, the TXBnSIDH, TXBnSIDL and
TXBnDLC registers must be loaded. If data bytes are
present in the message, the TXBnDm registers must
also be loaded. If the message is to use extended
identifiers, the TXBnEIDm registers must also be
loaded and the TXBnSIDL.EXIDE bit set.
Prior to sending the message, the MCU must initialize
the CANINTE.TXInE bit to enable or disable the
generation of an interrupt when the message is sent.
3.2 Transmit Priority
Transmit priority is a prioritization within the MCP2515
of the pending transmittable messages. This is
independent from, and not necessarily related to, any
prioritization implicit in the message arbitration scheme
built into the CAN protocol.
Prior to sending the SOF, the priority of all buffers that
are queued for transmission is compared. The transmit
buffer with the highest priority will be sent first. For
example, if transmit buffer 0 has a higher priority setting
than transmit buffer 1, buffer 0 will be sent first.
If two buffers have the same priority setting, the buffer
with the highest buffer number will be sent first. For
example, if transmit buffer 1 has the same priority
setting as transmit buffer 0, buffer 1 will be sent first.
There are four levels of transmit priority. If
TXBnCTRL.TXP<1:0> for a particular message buffer
is set to 11, that buffer has the highest possible priority.
If TXBnCTRL.TXP<1:0> for a particular message buf-
fer is 00, that buffer has the lowest possible priority.
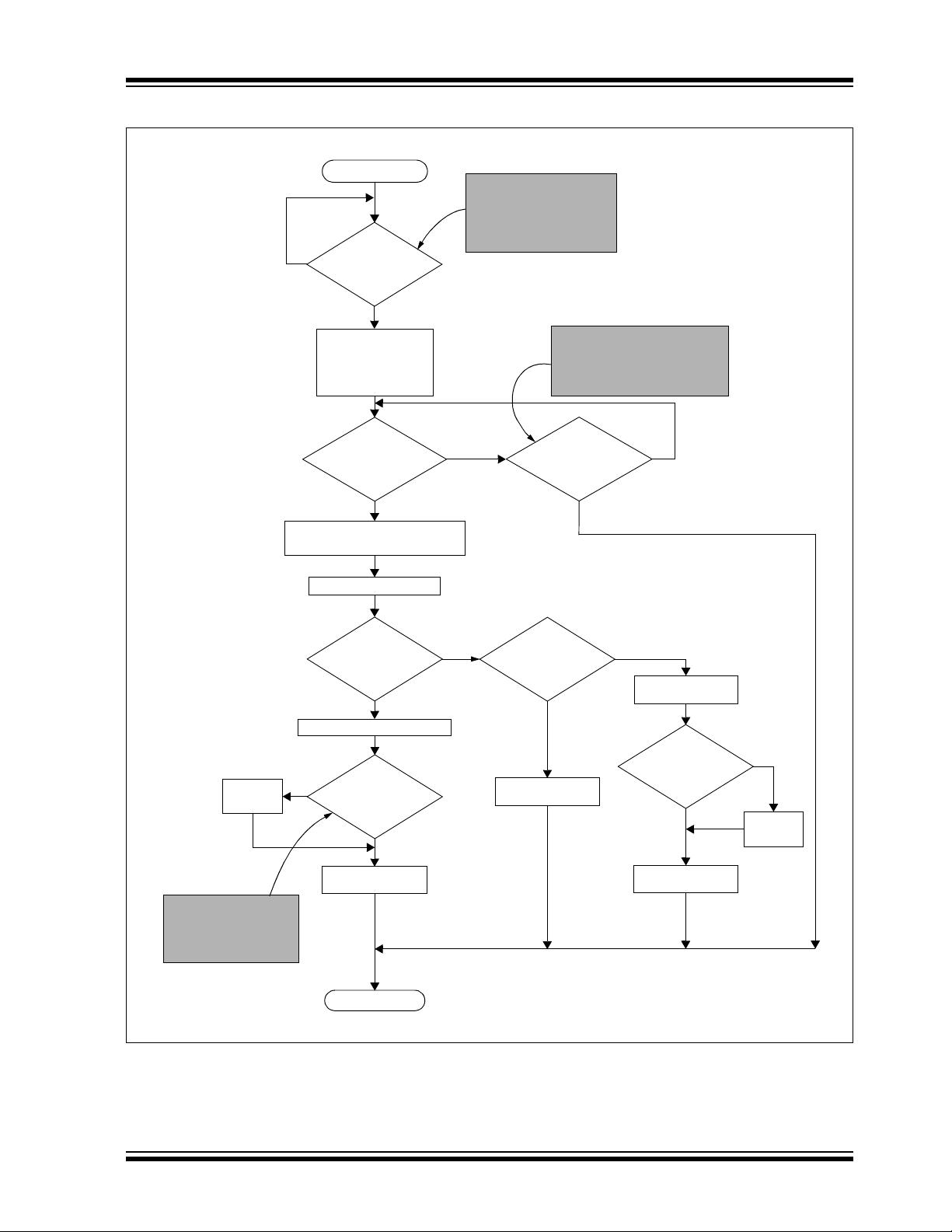
3.3 Initiating Transmission
In order to initiate message transmission, the
TXBnCTRL.TXREQ bit must be set for each buffer to
be transmitted. This can be accomplished by:
• Writing to the register via the SPI write command
• Sending the SPI RTS command
• Setting the TX
nRTS pin low for the particular
transmit buffer(s) that are to be transmitted
If transmission is initiated via the SPI interface, the
TXREQ bit can be set at the same time as the TXP
priority bits.
When TXBnCTRL.TXREQ is set, the TXBnCTRL.ABTF,
TXBnCTRL.MLOA and TXBnCTRL.TXERR bits will be
cleared automatically.
Once the transmission has completed successfully, the
TXBnCTRL.TXREQ bit will be cleared, the
CANINTF.TXnIF bit will be set and an interrupt will be
generated if the CANINTE.TXnIE bit is set.
If the message transmission fails, the
TXBnCTRL.TXREQ will remain set. This indicates that
the message is still pending for transmission and one
of the following condition flags will be set:
• If the message started to transmit but encoun-
tered an error condition, the TXBnCTRL.TXERR
and the CANINTF.MERRF bits will be set and an
interrupt will be generated on the INT
pin if the
CANINTE.MERRE bit is set
• If the message is lost, arbitration at the
TXBnCTRL.MLOA bit will be set
3.4 One-Shot Mode
One-Shot mode ensures that a message will only
attempt to transmit one time. Normally, if a CAN
message loses arbitration, or is destroyed by an error
frame, the message is retransmitted. With One-Shot
mode enabled, a message will only attempt to transmit
one time, regardless of arbitration loss or error frame.
One-Shot mode is required to maintain time slots in
deterministic systems, such as TTCAN.
Note: The TXBnCTRL.TXREQ bit must be clear
(indicating the transmit buffer is not
pending transmission) before writing to
the transmit buffer.
Note: Setting the TXBnCTRL.TXREQ bit does
not initiate a message transmission. It
merely flags a message buffer as being
ready for transmission. Transmission will
start when the device detects that the bus
is available.
Note: If One-Shot mode is enabled
(CANCTRL.OSM), the above conditions
will still exist. However, the TXREQ bit will
be cleared and the message will not
attempt transmission a second time.
剩余91页未读,继续阅读
3228 浏览量
174 浏览量
431 浏览量
712 浏览量
147 浏览量
257 浏览量
187 浏览量

烛火飞蛾
- 粉丝: 196
 我的内容管理
展开
我的内容管理
展开







最新资源
- ChromEMMET TGO-crx插件:提升HTML开发效率
- 探索Linux早期版本:Linux-0.11压缩包深度解析
- 从MySQL到Oracle的数据移植案例分析
- 利用MFC实现菜单事件驱动的绘图操作
- Kubernetes 1.7.11套件深度解析
- 山大软件工程硕士《商务智能》课程全攻略
- 提升SEO效率的Easy SEO-crx插件指南
- 图像处理基础:灰度图的直方图均衡与平滑滤波
- 掌握Spark 2源码:从GitHub LearningSparkV2项目学习
- Xftp工具使用教程及下载指南
- 4套Flash 3D相片墙商业模板免费下载
- Java与MongoDB操作实践:从库到GridFS全面解析
- LGP500基带刷机教程及资源包
- FlexBall游戏开发教程与源码分享
- 高效压缩神器:小日本压缩工具详解
- 自动化测试历史记录管理:CRX插件应用解析
