柔性悬索结构动力学建模与风扰控制
需积分: 5 169 浏览量
更新于2024-08-11
1
收藏 189KB PDF 举报
"一种柔性悬索结构的建模与控制 (2006年),黄进、段宝岩发表于西安电子科技大学机电工程学院"
本文详细探讨了悬索结构的建模与控制问题,特别是针对其强非线性和大滞后特性。悬索结构,常见于桥梁和大型建筑中,其动态行为复杂,对风、重力等因素敏感,因此建立精确的模型对于设计有效的控制系统至关重要。
首先,作者提出了一种基于铰接的弹簧阻尼系统来离散地模拟柔性悬索。这个模型考虑了悬索的刚度,这是决定结构响应的关键因素。刚度描述了结构抵抗变形的能力,对预测悬索在受力情况下的形态变化有直接影响。此外,模型还包括内部阻尼,这反映了悬索内部因振动而消耗能量的过程,有助于稳定结构。同时,模型还考虑了重力的作用,这是悬索结构必须承受的基本力,以及风扰,即风对悬索产生的随机动力负荷,这对悬索的动力响应影响显著。
在建立模型的基础上,作者进一步构建了包含悬索和控制器的整个悬索控制系统。这个系统旨在通过适当的控制策略,对悬索的动态行为进行精确调节,以应对各种外部干扰。他们采用了四阶Runge-Kutta方法进行数值仿真,这是一种常用于求解常微分方程的强大工具,能够准确模拟时间演变过程。通过对风扰作用下的悬索控制系统进行仿真,结果验证了所提出的模型和控制策略的有效性,显示了该方法在实际应用中的可行性。
关键词如“悬索结构”、“动力学建模”和“跟踪控制”揭示了研究的核心内容。动力学建模是理解悬索结构动态行为的基础,而跟踪控制则关注如何通过控制手段使悬索结构的响应符合预设目标。文章的中图分类号"TP273"表明它属于工程技术领域,特别是自动控制技术。文献标识码"A"表示这是一篇原创性研究论文,文章编号则提供了具体的信息以便于读者查找和引用。
这篇2006年的论文为理解和控制柔性悬索结构提供了一种新的方法,对于提升此类结构的安全性、稳定性和设计效率具有重要意义。通过深入研究和仿真验证,作者展示了如何克服悬索结构固有的非线性和滞后问题,为未来类似工程项目的控制设计提供了有价值的参考。
收稿日期:2005 -03-08
基金项目:国家自然科学基金重点项目资助(10433020)
作者简介:黄 进(1968-),男,副教 授,博士 .
一种柔性悬索结构的建模与控制
黄 进, 段宝岩
(西安电子科技大学 机电工程学院,陕西 西安 710071)
摘要: 针对悬索结构强非线性和大滞后的特点,提出了一种基于铰接的弹簧阻尼系统柔性悬索的离散
模型,此模型包含了悬索刚度、内部阻尼、重力及风扰等信息.在此基础上,建立了由悬索和控制器组成
的悬索控制系统的数学表达式,并采用四阶 R unge Kutta 方法对风扰作用下的悬索控制系统进行了数值
仿真,表明此模型和控制方法的有效性.
关键词: 悬索结构;动力学建模;跟踪控制
中图分类号:TP273 文献标识码:A 文章编号:1001-2400(2006)01-0037-04
M odeling and control of a flexiblecablesystem
HUANG Jin, DUAN Bao-yan
( School of M echano-electronic E ngineering, X idian U niv., X i′an 710071 , C hina)
A bstract: A ccording to the strong nonlinearity and lag of the cable feed system , a d iscrete
m odel, consisting of a jointed spring-dam ping system , is proposed. The cab le stiffn e s s ,
internal dam ping, joint friction, gravity and w ind disturbance are included in this m odel in
o rd e r to g iv e a n a c c u ra te d e sc rip tio n o f th e c a b le , o n th e b a sis o f w h ic h th e m a th e m a tic a l
representation of a cable feed m echanism and a controller is developed, andaseriesof
s im u la tio n is c a rrie d o u t w ith th e 4 th o rd e r R u n g e K u tta m e th o d . R e su lts s h ow the effectiveness
o f th is m o d e l a n d c o n tro lle r.
K ey W ords: cable system ;dynam ic m odeling;tracking control
在大跨度空间结构中采用柔性悬索将使其具有优异的技术性能和突出的经济性,
因此在现代工程实践中
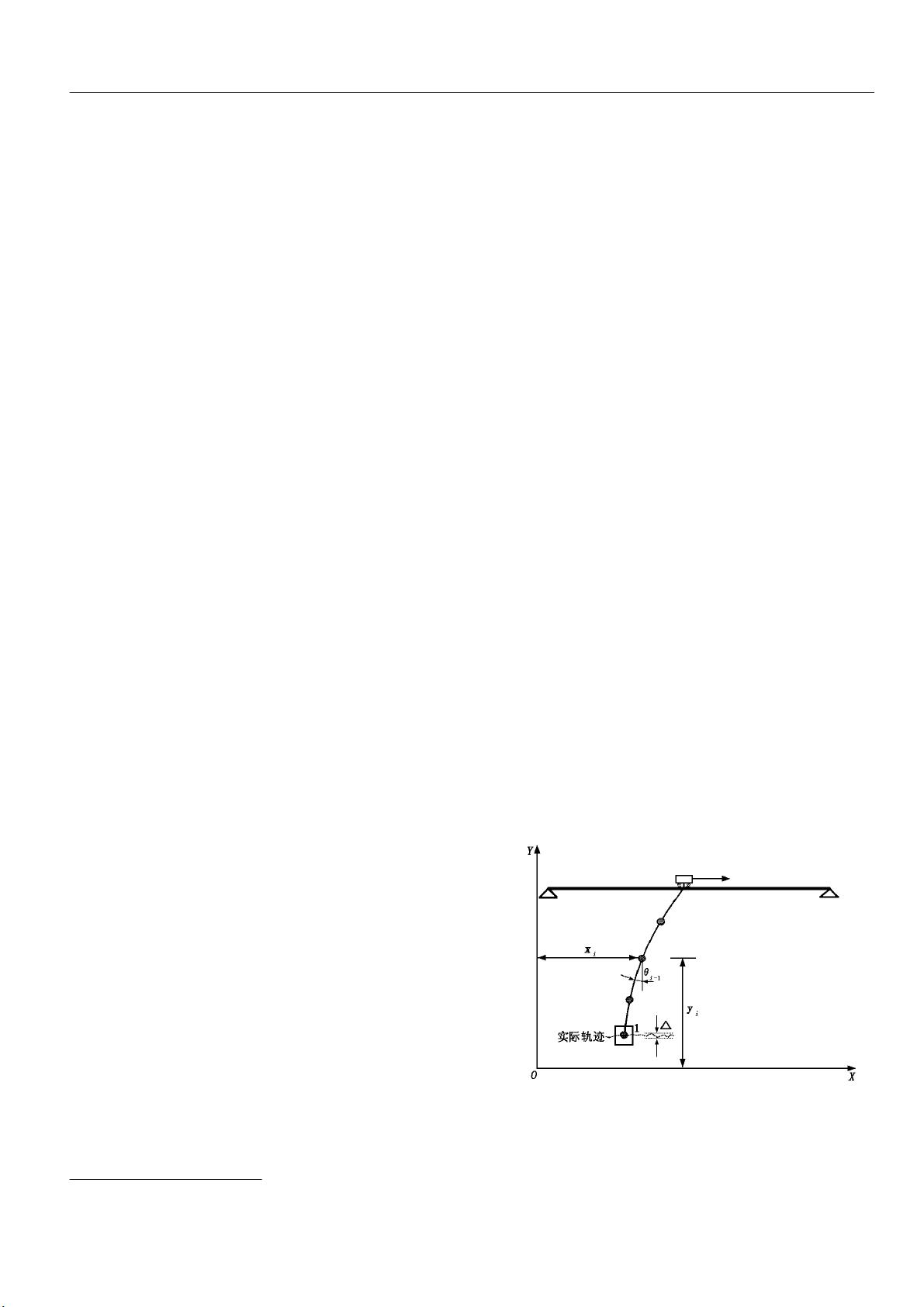
图 1 悬索结构的控制
柔性悬索结构得到了越来越广泛的应用.在“新一代大射电
望远镜光机电一体化设计”方案中,正是由于采用了柔性悬
索结构,才得以将近 1 000 t的背架结构去掉,只留下由 6 根
钢索悬吊的20 t左右的馈源结构
[1]
.然而,由于柔性悬索具
有无穷多自由度,加之易受风载荷等因素的影响,从而使此
种结构的控制面临着巨大的挑战
[1 ,2]
.
考虑图 1 所示的一种典型的柔性悬索结构.重物 M 通
过一悬索悬挂在理想小车的下方.小车可在外部控制作用
下沿水平轨道以指定的速度滑动,从而导致重物的垂直高
度发生变化.要求通过施加适当的控制作用,在存在随机
风扰的情况下,使重物能够在一定范围内以不超过 Δ的误
差保持在指定的高度上.为了能够设计出适用于这类柔性
悬索结构的鲁棒控制系统,从而有效地克服包含随机风荷在内的扰动作用的影响,迫切需要一种能真实反映
2006 年 2 月
第33卷 第1期
西安电子科技大学学报(自然科学版)
JO UR N AL O F X ID IAN U NIVER SITY
Feb.2006
Vol.33 No.
1
下载后可阅读完整内容,剩余4页未读,立即下载
2010-03-03 上传
2024-05-03 上传
2021-06-12 上传
2021-05-09 上传
2022-09-19 上传
2021-05-10 上传
2021-09-10 上传

weixin_38664532
- 粉丝: 9
- 资源: 945
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
