基于k平面聚类的机载LiDAR数据建筑屋顶精确分割
需积分: 5 117 浏览量
更新于2024-07-14
收藏 2MB PDF 举报
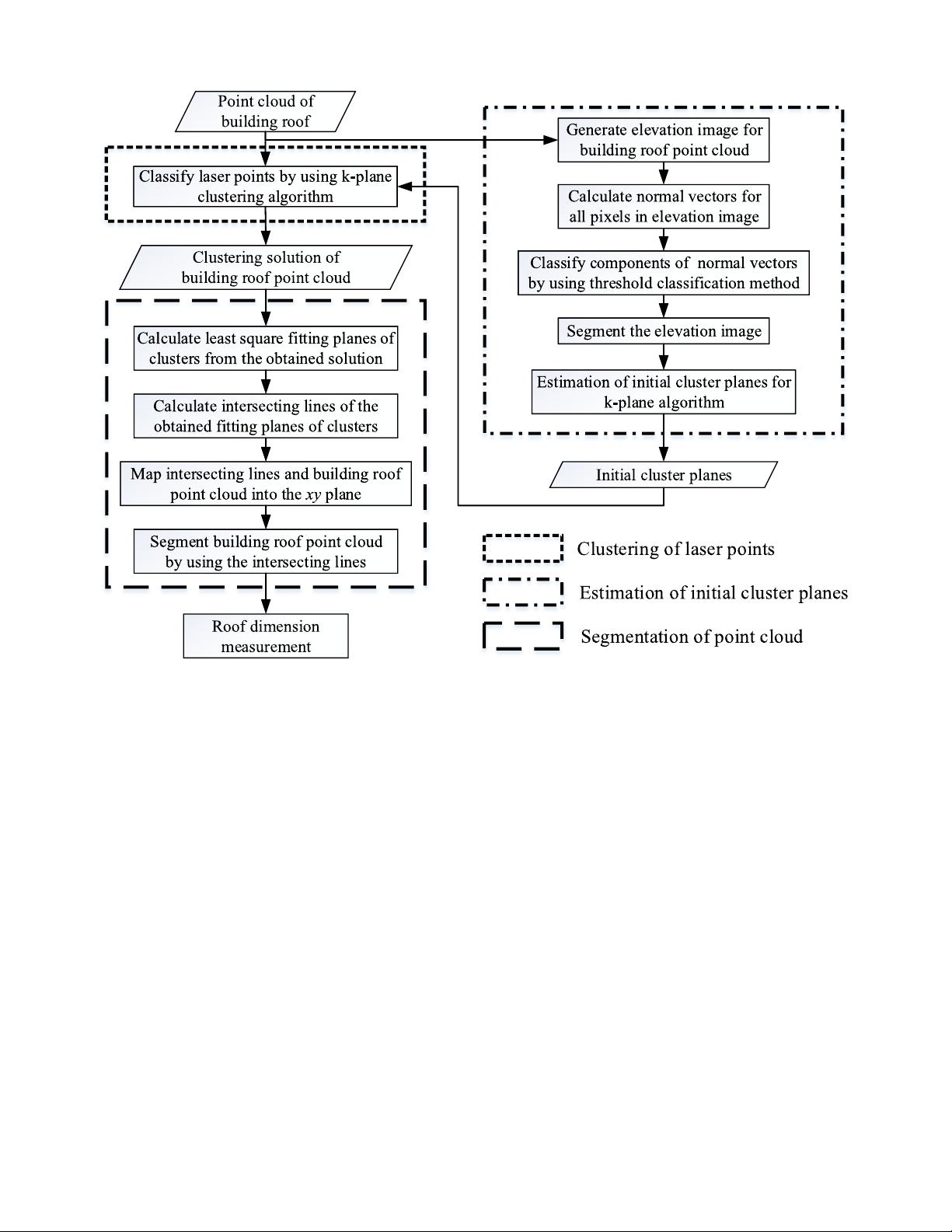
本文主要探讨了一种创新的机载LiDAR数据分类方法,用于精确测量建筑物屋顶。该方法基于k平面聚类算法,其核心在于利用机载激光测距仪(LiDAR)获取的建筑物点云进行分析。传统上,模糊k-均值聚类方法可能依赖于激光点周围平面的法线向量作为聚类对象,这可能导致分类过程复杂且精度受限。
在新提出的k平面分类方法中,首先,点云中的3D激光点坐标直接被用作聚类的基础,这简化了处理流程。在聚类过程中,对每个聚类内的激光点进行拟合,形成一个平面。然后,通过计算这些拟合平面的交线,确定屋顶点云的分界线,从而实现有效的分割。这种方法的优势在于避免了模糊k-均值算法中的法线向量计算,从而降低了算法的复杂性并提高了分类结果的准确性。
在实施k平面聚类前,为了确保算法的有效性,研究者会先基于建筑物屋顶的高程图像估计初始聚类平面,这一步骤有助于预先组织数据,提高后续聚类的精度。通过这种方法,建筑物屋顶的复杂形状能够得到更为精确和可靠的测量,尤其是在处理大规模和高精度的LiDAR数据时。
文章验证了这种方法的有效性和实用性,通过使用大量的实际机载LiDAR点云数据进行测试,结果显示,与传统的分类技术相比,基于k平面的分类方法在处理效率和精度上都有显著提升。因此,这项工作对于改进建筑物屋顶测量的自动化程度,特别是在城市规划、遥感和测绘等领域具有重要意义。
总结来说,这篇论文提出了一种创新的LiDAR数据处理策略,它结合了k平面聚类和精确的屋顶分割技术,有望在提高建筑物测量精度的同时,简化了数据分析流程,对于推动LiDAR技术在地理空间信息处理中的应用有着积极的影响。
1202 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 63, NO. 5, MAY 2014
Fig. 1. Flow chart of the proposed classification method.
coordinates of the ith (1 ≤ i ≤ N) laser point in the point
cloud of building roof are directly assigned to the ith clustering
object v
i
,whereN is the number of laser points in the point
cloud of the building roof. The jth (1 ≤ j ≤ M) cluster
plane in the k-plane algorithm is denoted as cp
j
,whereM is
the number of cluster planes. In the xyz Cartesian coordinate
system, w
j
, the unit normal vector of cp
j
, satisfies
w
j
∗ (x, y, z)
T
+ r
j
= 0(1)
where r
j
is the intercept on a perpendicular of cp
j
(the per-
pendicular of cp
j
should cross the origin of the xyz coordinate
system), and T represents the transpose of a matrix. The
Euclidean distance between v
i
and cp
j
, denoted as d(v
i
, cp
j
),
is obtained by
d(v
i
, cp
j
) =|w
j
∗ (x
i
, y
i
, z
i
)
T
+ r
j
| (2)
where x
i
, y
i
, and z
i
are the 3-D coordinates of v
i
. Similarly,
the Euclidean distances between v
i
and the other M-1 cluster
planes are calculated. Subsequently, the minimum value of the
Euclidean distances is selected to find the closest cluster plane
for v
i
,as
d(v
i
, cp
k
) = min
j∈[1,M]
d(v
i
, cp
j
)
(3)
where cp
k
represents the kth cluster plane which is closest
to v
i
among the M cluster planes. Then, v
i
is classified into
the kth cluster, which is denoted as C
k
. All the other N-1
clustering objects are classified into M clusters in the same
way. After that the cluster planes of the k-plane algorithm are
updated with the least square fitting planes of laser points in
the clusters. Using the updated cluster planes, the laser points
in the point cloud of the building roof are classified again,
and then, the cluster planes are updated again. In this way,
the iterative clustering operation is carried out. The objective
function of the k-plane algorithm is expressed as
J
k-plane
=
M
k=1
v
i
∈C
k
[d(v
i
, cp
k
)]
2
. (4)
Consequently, when J
k-plane
converges to the minimum value,
{v
i
∈ C
k
|1 ≤ i ≤ N,1≤ k ≤ M} is output as the clustering
solution of the building roof point cloud.
C. Segmentation of Point Cloud
From the clustering solution of the building roof point cloud,
which is obtained by using the k-plane algorithm, the least
square fitting planes of the laser points in the clusters are
剩余14页未读,继续阅读
2022-05-31 上传
2023-04-20 上传
2021-08-15 上传
2023-06-01 上传
2023-06-01 上传
2023-10-09 上传
2023-05-12 上传
2023-05-24 上传
2023-09-16 上传

weixin_38538472
- 粉丝: 5
- 资源: 858
 我的内容管理
展开
我的内容管理
展开







最新资源
- 开源通讯录备份系统项目,易于复刻与扩展
- 探索NX二次开发:UF_DRF_ask_id_symbol_geometry函数详解
- Vuex使用教程:详细资料包解析与实践
- 汉印A300蓝牙打印机安卓App开发教程与资源
- kkFileView 4.4.0-beta版:Windows下的解压缩文件预览器
- ChatGPT对战Bard:一场AI的深度测评与比较
- 稳定版MySQL连接Java的驱动包MySQL Connector/J 5.1.38发布
- Zabbix监控系统离线安装包下载指南
- JavaScript Promise代码解析与应用
- 基于JAVA和SQL的离散数学题库管理系统开发与应用
- 竞赛项目申报系统:SpringBoot与Vue.js结合毕业设计
- JAVA+SQL打造离散数学题库管理系统:源代码与文档全览
- C#代码实现装箱与转换的详细解析
- 利用ChatGPT深入了解行业的快速方法论
- C语言链表操作实战解析与代码示例
- 大学生选修选课系统设计与实现:源码及数据库架构
