立体视觉原理:从图像到3D模型的探索
版权申诉
143 浏览量
更新于2024-07-19
收藏 12.28MB PDF 举报
"立体视觉原理的展示概念科普.pdf"
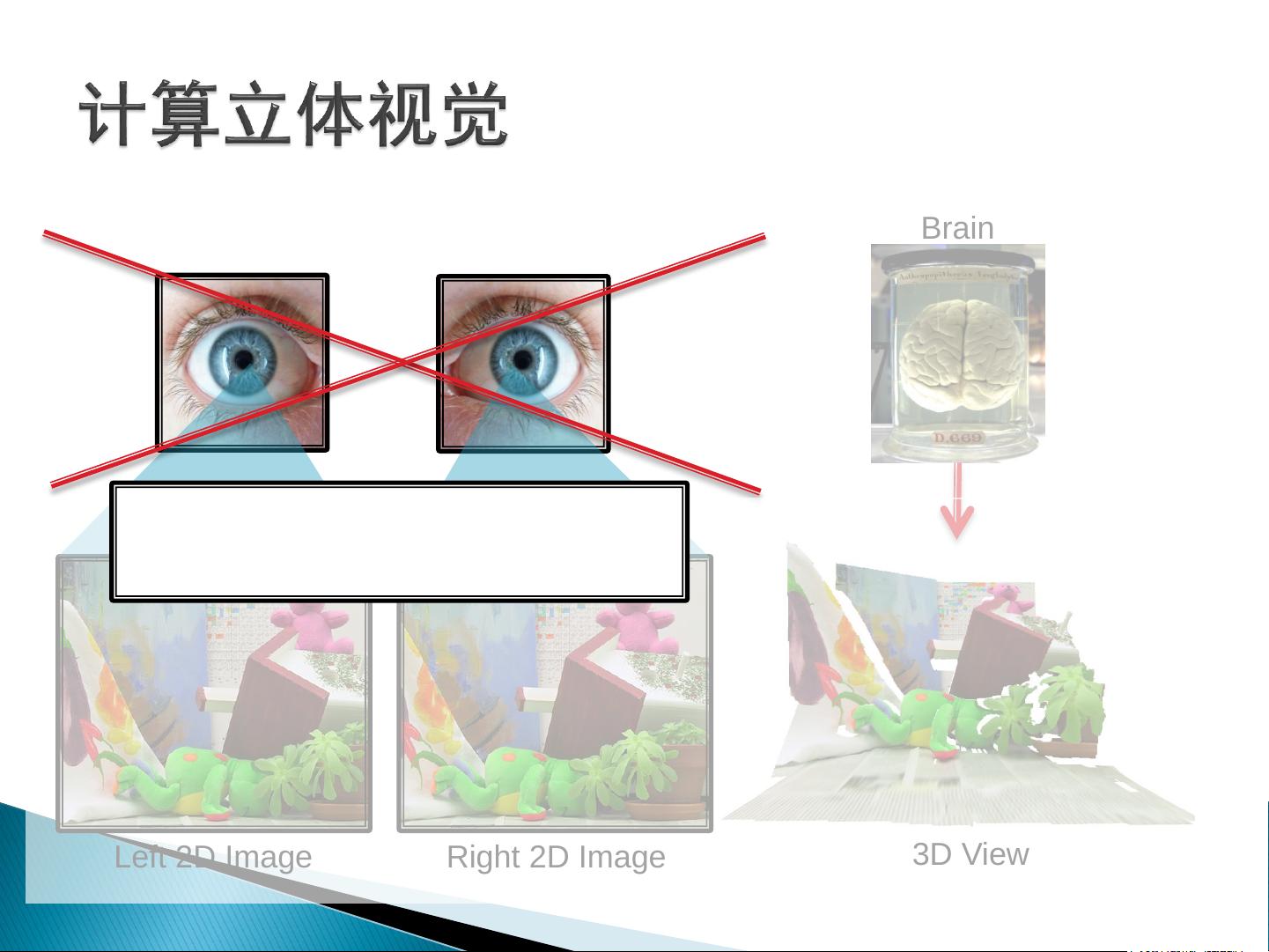
立体视觉,顾名思义,是指通过观察物体的多个视角来获取其三维信息的能力。在计算机视觉领域,这一概念被用来模拟人类双眼视觉系统,以便从二维图像中重建三维场景。D.Marr的视觉计算理论将计算机视觉分为三个阶段,其中第三阶段专注于从图像数据中构建物体的三维模型。这个文件详细介绍了立体视觉的一些关键原理,包括从图像中提取深度信息的各种线索。
首先,图像中的阴影、纹理、遮挡、运动和模糊等元素都是深度线索。例如,阴影可以揭示光源的位置和物体表面的相对位置,从而推断出物体的形状和深度。纹理的变化也可以提供深度信息,因为物体的不同部分可能由于距离相机远近不同而呈现出不同的纹理细节。遮挡现象,即一个物体部分阻挡另一个物体,可以暗示它们之间的前后关系。运动线索,如视差,可以通过物体相对于背景的移动来估计距离。模糊程度通常与距离成反比,更远的物体看起来更模糊。
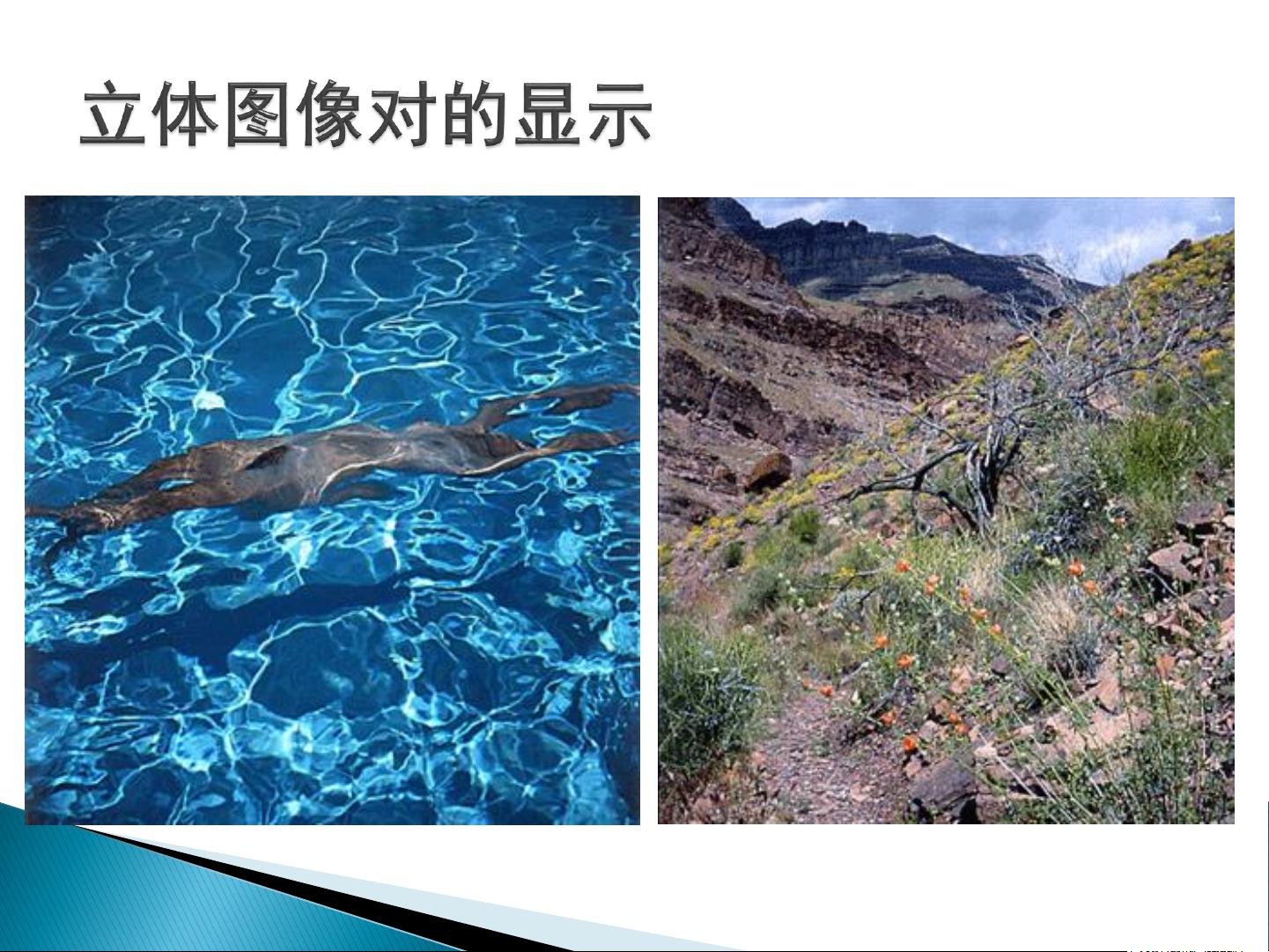
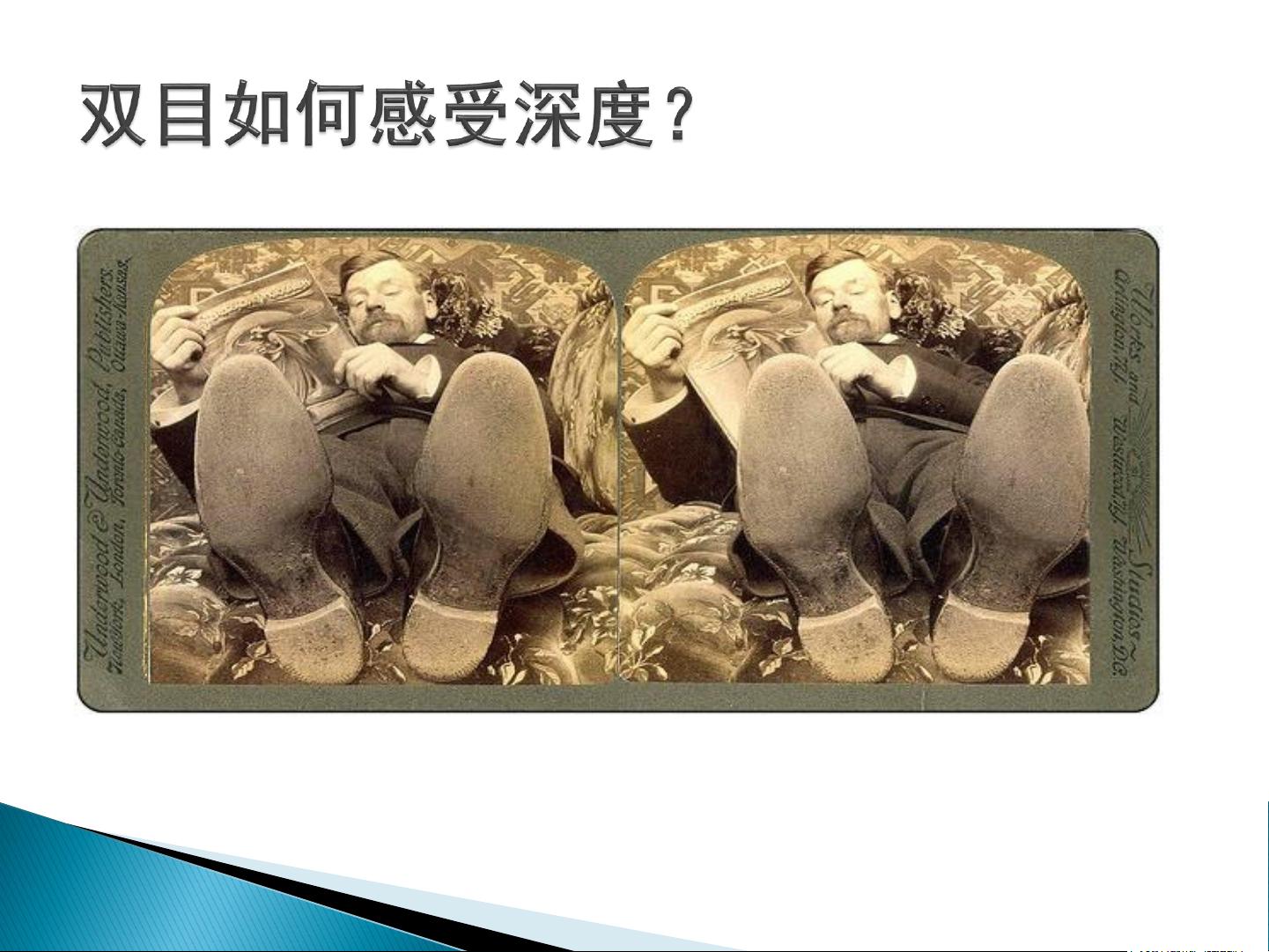
文件中提到了几种实现立体视觉的技术,如红蓝眼镜、偏振光眼镜和快门眼镜,这些都是基于视差的立体视觉技术,用于电影院或3D电视。这些技术利用左右眼看到的略微不同的图像来欺骗大脑,产生深度感。在实际应用中,例如LGOptimus3D手机,就是通过这种方式来实现3D显示的。
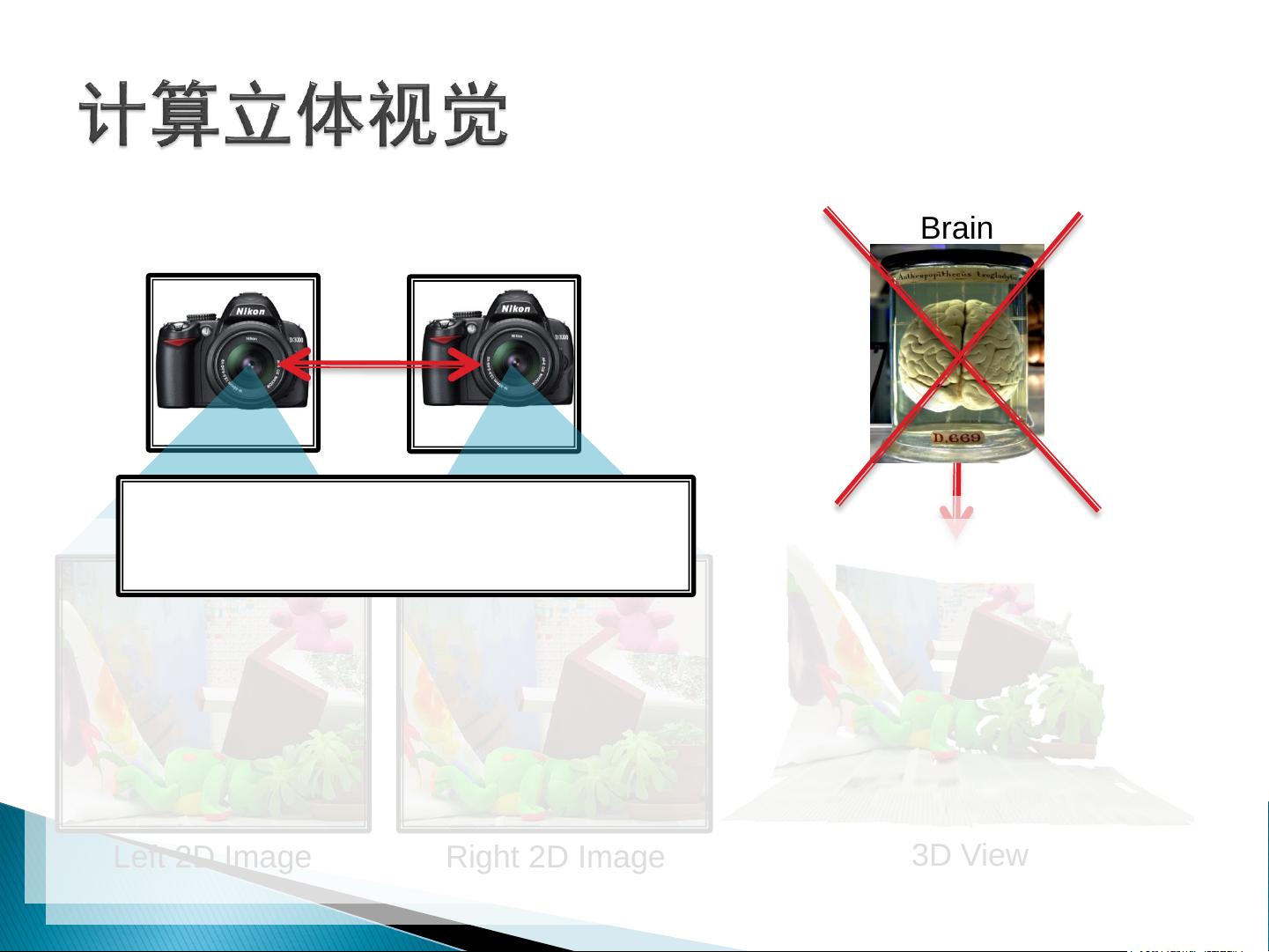
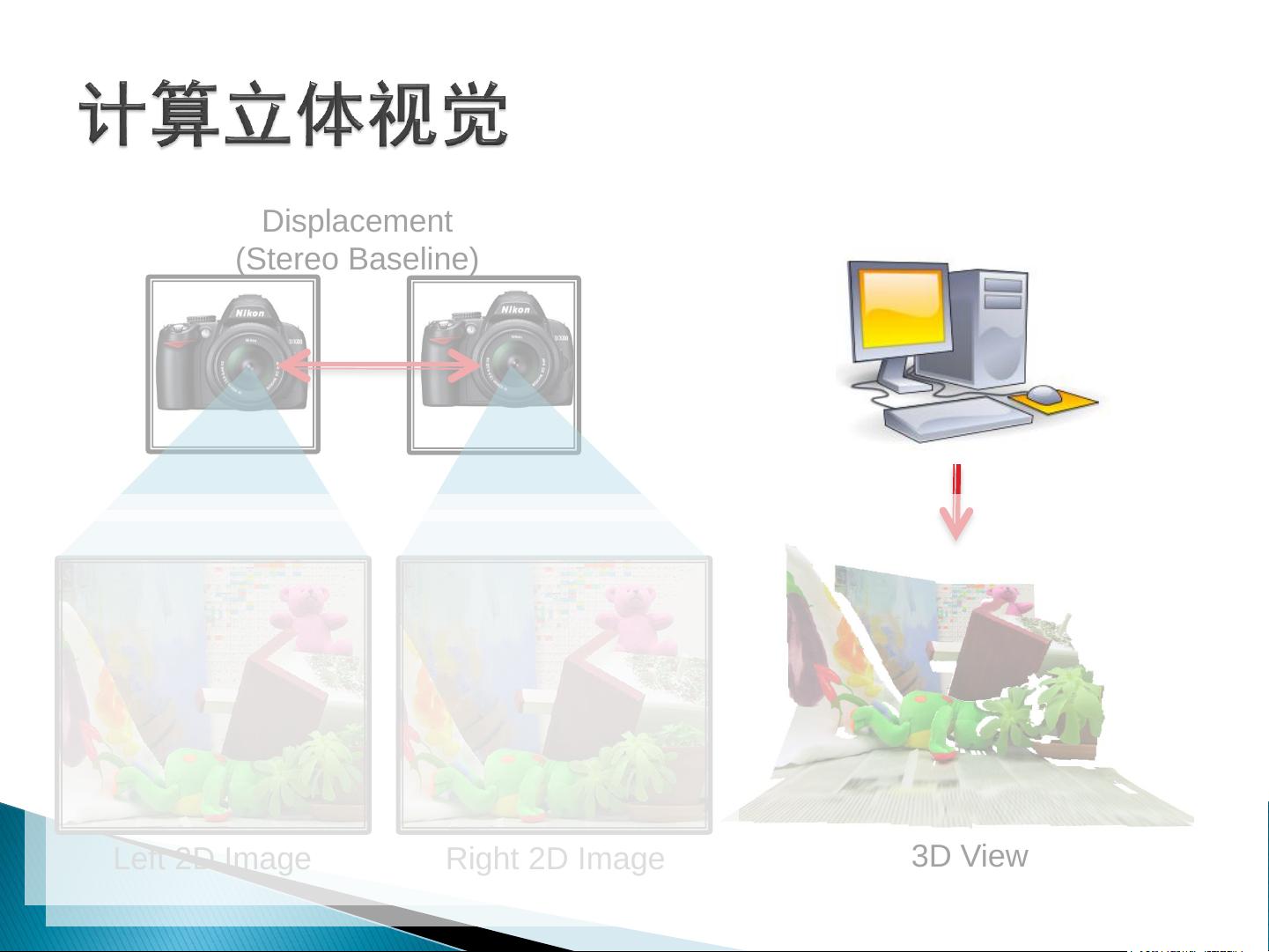
此外,文件还探讨了使用一对相机模拟人眼的方式。两个相机之间的基线(即相机间的距离)产生了视差,这是计算深度的关键。当光线从空间中的点P投射到两个相机的图像平面上时,形成两个不同的投影点pl和pr。由于这两个点的位置差异(即视差),我们可以运用三角测量原理来计算出点P的深度。然而,单个图像(单目视觉)无法解决深度感知的歧义问题,因为同一像素位置可能对应多个深度值。通过引入第二个相机,我们可以消除这种歧义,从而准确地确定物体的三维位置。
立体视觉原理是计算机视觉中的核心概念,它涉及到图像处理、几何光学和深度感知等多个方面。理解和掌握这些原理对于开发3D视觉系统、自动驾驶汽车、机器人导航、虚拟现实等领域至关重要。通过学习和应用这些知识,我们可以让计算机更好地理解周围环境,从而实现更加智能和逼真的交互。
144 浏览量
149 浏览量
点击了解资源详情
2023-06-02 上传
2022-01-05 上传
2022-11-06 上传
2021-09-26 上传
2021-09-28 上传
2024-05-29 上传


是稀饭呀。
- 粉丝: 149
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
