智能救援小车设计与实现:避障、循迹与金属检测
"智能小车完整材料,包括原理图、程序清单、器件选择等所有资料。"
本资源是一份详尽的智能救援小车设计方案,适用于学习和实践智能小车技术。该小车具备避障、循迹以及金属检测与转移等功能,适用于如2008年山东省电子设计竞赛中的相关课题。以下是主要的知识点:
1. **设计任务概述**:
- 设计任务是制作一款能完成基本功能和创新扩展功能的智能救援小车。
- 基本任务包括智能避障、路面循迹和金属铁片检测与转移。
- 发挥部分包括测温、无线遥控、测速及里程、测量路面坡度。
2. **系统方案论证与选择**:
- 车体方案:选择了适合承载各种模块的结构。
- 控制模块:采用了STC89C52单片机作为主控单元,负责数据处理和决策。
- 电源模块:设计了可靠的电源电路,确保稳定供电。
- 电机模块:采用直流减速电机,结合电机驱动芯片L293D进行高效驱动。
- 避障模块:使用光电开关进行障碍物检测。
- 循迹模块:采用RPR220型光电对管实现路径跟踪。
- 金属传感器模块:电感式接近开关用于检测金属铁片。
- 其他模块还包括报警、语音提示、显示等,增强了小车的功能性和交互性。
3. **硬件系统的设计与功能实现**:
- 主线路板制作:整合了所有模块,确保信号传输和处理。
- 微控制器电路:STC89C52的电路设计,处理传感器数据并控制小车行为。
- 电源电路:设计了能够满足小车各部件需求的电源解决方案。
- 电机驱动电路:通过L293D驱动电机,实现精确控制。
- 避障、循迹和金属检测电路:详细阐述了传感器的原理和安装方法。
- 铁片转移电路:利用线圈产生的磁场实现铁片的拾取和转移。
- 语音提示电路:提供语音反馈,增强用户交互体验。
4. **软件设计的实现与说明**:
- 主程序流程图:展示了小车控制软件的整体逻辑结构。
- 路面循迹子程序:详细解释了如何通过光电对管实现路径追踪。
- 程序清单:提供了实际的编程代码,便于理解和复制。
5. **系统功能测试**:
- 使用了特定的测试仪器和设备,对小车的各项功能进行了全面测试。
- 功能测试分为基本要求和发挥部分,确保所有功能正常运行。
6. **结论**和**结束语**:
- 对整个项目进行了总结,强调了设计的创新点和实际应用价值。
这份资料全面涵盖了智能小车的设计、实现和测试过程,对于学习者来说是一份宝贵的教育资源,可以深入了解智能小车的构建过程和技术细节。通过这份资料,读者可以学习到如何选择和使用传感器、微控制器的编程以及硬件系统的设计与调试等关键技能。
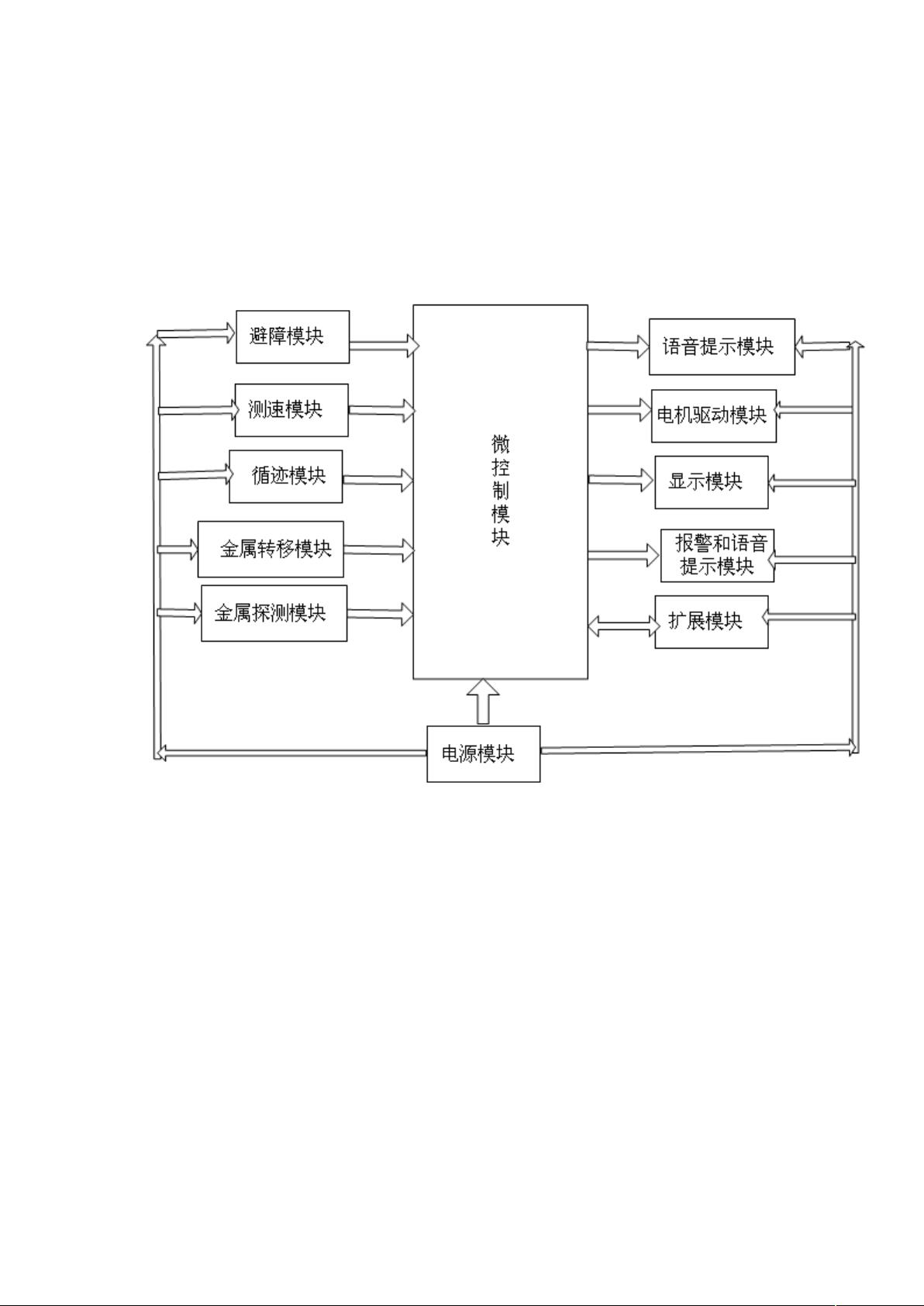
二、系统方案论证与选择
根据题目中的设计要求,本系统主要由微控制器模块、电源模块、避障模
块、循迹传感器模块、直流电机及其驱动模块、金属检测模块、角度测量模块,
语音提示模块以及液晶显示模块等构成。本系统的方框图如图 1 所示:
系统总框图
为较好的实现各模块的功能,我们分别设计了几种方案并分别进行了论证。
2.1 车体方案论证与选择
方案 1:购买玩具电动车。购买的玩具电动车具有组装完整的车架车轮、
电机及其驱动电路。玩具电动车的电机多为玩具直流电机,力矩小,空载转
速快,负载性能差,不易调速。而且这种电动车一般都价格不菲。因此我们
放弃了此方案。
方案 2:自己制作电动车。经过反复考虑论证,我们制定了左右两轮分别
驱动,在校车后面加万向轮转向的方案。即左右轮分别用两个转速和力矩基
本完全相同的直流电机进行驱动,车体尾部装一个万向轮。这样,当两个直
流电机转向相反同时转速相同时就可以实现电动车的原地旋转,由此可以轻
松的实现小车坐标不变的 90 度和 180 度的转弯。当小车前进时,左右两驱
动轮与后万向轮形成了三点结构,这种结构使得小车在前进时比较平稳。为
了防止小车重心的偏移,后万向轮起支撑稳定的作用。对于车架材料的选择,
我们经过比较选择了实验室常用的敷铜电路板。用敷铜电路板做的车架比塑
剩余24页未读,继续阅读
167 浏览量
点击了解资源详情
点击了解资源详情
2022-05-06 上传
102 浏览量
2022-07-06 上传
128 浏览量
2024-01-27 上传
127 浏览量

ming_he_liang
- 粉丝: 0
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- onthedollar-api:税额计算器
- IT385
- Software-Testing
- OpenCvSharp从入门到实践-(01)认识OpenCvSharp&开发环境搭建 Demo
- 更好的恐慌-受Python的回溯启发而产生的非常恐慌的回溯-Rust开发
- 行业文档-设计装置-高中英语教学用划线器.zip
- 文件上传必备jar包fileupload与io.rar
- Python图像处理PCA算法完整源码
- bewitchedlogin.github.io:bla bla bla bla bla
- sample
- 智睿学校网上评课系统 v8.4.0
- printf_on_BIOS
- 世界之窗浏览器(TheWorld) v5.0 Beta
- GIS-Portfolio
- 项目管理案例研究:项目:“诺尔特制造工厂的工厂分析集成”-IST 645管理信息系统项目
- Angkor_website:网页设计与开发班的学校项目
