超声波避障智能小车设计与制作
需积分: 1 140 浏览量
更新于2024-07-23
收藏 2.27MB DOC 举报
"这篇文档是江阴职业技术学院一个关于智能超声波避障小车设计与制作的项目报告。报告由学生撰写,指导教师指导,详细介绍了如何制作一款能自动避障的智能小车,包括设计思路、软硬件功能及工作原理,并经过实践测试验证了其性能的稳定性和可靠性。"
智能超声波避障小车是一种广泛应用在机器人领域的微型装置,它结合了电子技术、控制理论和计算机编程等多种技术,能在各种环境中自主导航并避开障碍物。这种小车的核心功能在于其避障能力,主要依赖于超声波传感器。
超声波传感器是智能小车的关键组件,它利用超声波的发射和接收来探测周围环境。当传感器发出超声波脉冲后,如果遇到障碍物,脉冲会被反射回来。通过测量发射和接收之间的时间差,可以计算出到障碍物的距离。这种方法具有精度高、响应快的优点,尤其适合在小车移动速度较快时进行实时避障。
在设计阶段,选择合适的硬件方案至关重要。通常,智能小车会包含微控制器(如Arduino或Raspberry Pi)、超声波传感器、电机驱动模块和电源模块等。微控制器作为大脑,负责处理传感器数据、决策和控制电机运动;电机驱动模块则用来控制小车的前进、后退和转向;电源模块提供必要的电能以维持系统运行。
软件部分,通常需要编写控制程序来实现避障算法。这些算法可能包括距离检测、路径规划和动态决策等。例如,可以设定一个安全距离阈值,当小车检测到障碍物距离小于这个阈值时,就自动改变行驶方向或者停止。此外,还需要考虑小车的稳定性,确保在不同环境条件下都能正常工作。
在实践验收测试阶段,需要评估小车的各项性能,如避障反应时间、运行稳定性、能耗等。如果测试结果满意,说明设计方案合理且有效,可以进一步优化并应用到更复杂的场景中。
总结来说,智能超声波避障小车的设计与制作涉及到电子工程、传感器技术、微控制器编程等多个方面的知识,通过这样的项目,不仅可以提升学生的实践技能,也能让他们深入理解自动化和机器人技术的基本原理。

《单片机应用系统》项目设计报告
1.3 设计思路:
直流电机 PWM 控制系统的主要功能包括:实现对直流电机的加速、减速,并
且可以调整电机的转速,能够很方便的实现电机的智能控制。主体电路:即直
流电机 PWM 控制模块。这部分电路主要由 AT89S52 单片机 的 I/O 端口、定
时计数器、外部中断扩展等控制直流电机的加速、减速以及转弯,并且可以调
整电机的转速,能够很方便的实现电机的智能控制。 其间是通过 AT89S52 单
片机产生脉宽可调的脉冲信号并输入到 L298 驱动芯片来 控制直流电机工作的。
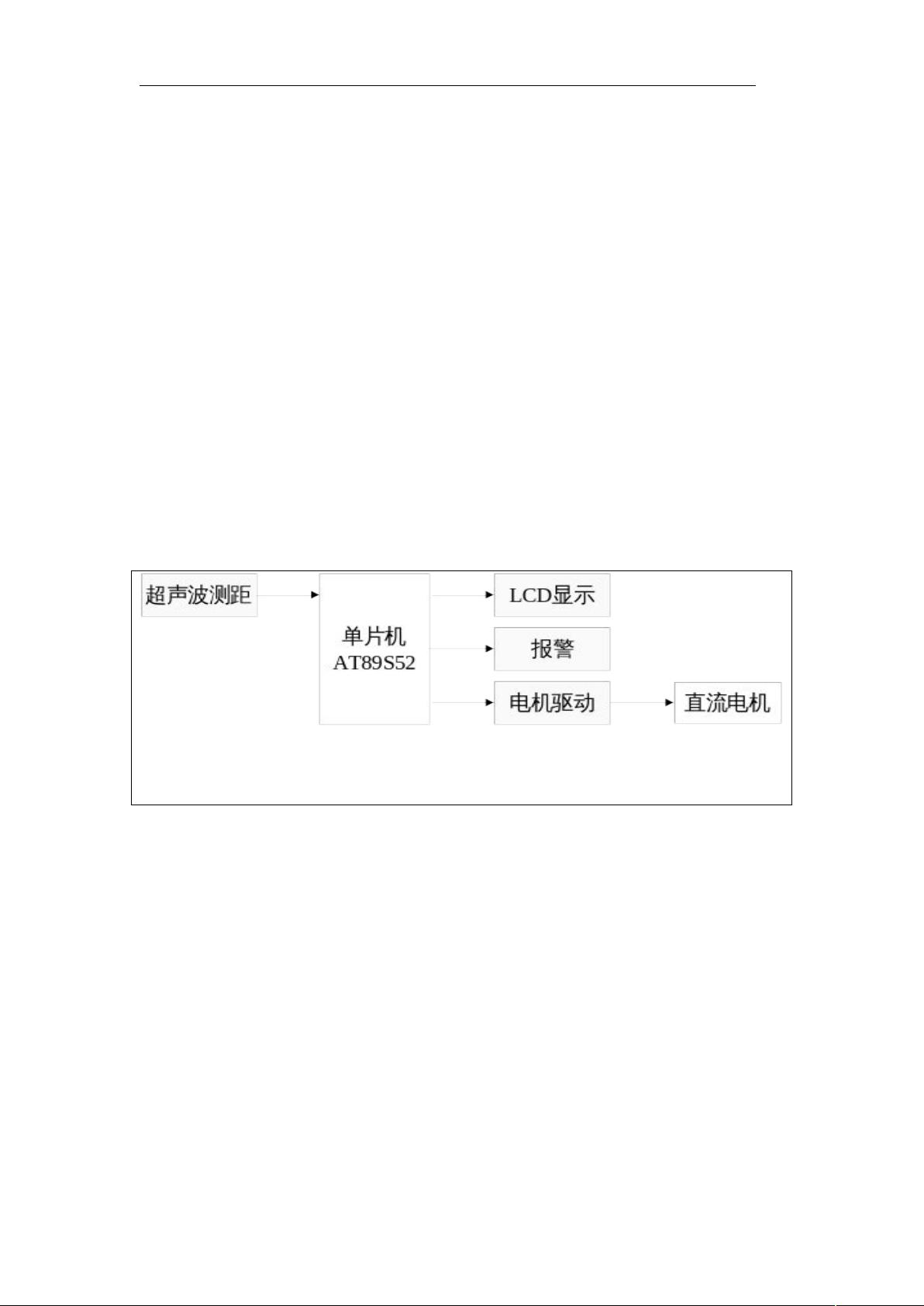
该直流电机 PWM 控制系统由以下电路模块组成:设计控制部分: 主要由
AT89S52 单片机的外部中断扩展电路组成。直流电机 PWM 控制实现部分主要
由电机和 L298 直流电机驱动模块组成。设计显示部分:LCD 数码显示部分,
实现对超声波测的距离的实时显示。
1.4 应用场合和功能:
应用场合:智能小车是一种能够通过编程手段完成特定任务的小型化机器人,
它具有制作成本低廉,电路结构简单,程序调试方便等优点。由于具有很强的
趣味性,智能小车深受广大机器人爱好者以及高校学生的喜爱。同时在玩具的
应用上深受小朋友的青睐。
功能:本小车使用 AT89S52 单片机作为主控芯片,它通过超声波测距来获取
小车距离障碍物的距离,并且用 LED 显示出来,当小车与障碍物的距离大于
40cm 时,小车会沿直线前进,当小车与障碍物的距离小于 30cm 时,小车转
弯以避开障碍物,并且此时蜂鸣器报警。在避开障碍物后,小车会沿直线前进。
- 2 -
剩余36页未读,继续阅读
2020-12-28 上传
2021-01-20 上传
2013-05-07 上传
2019-03-16 上传
197 浏览量
2012-11-14 上传
2014-09-24 上传
183 浏览量

u014538483
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 搜索引擎--原理、技术与系统
- Hibernate开发指南
- Ajax经典案例开发大全
- GDB完全中文手册GDB调试
- JThread manual
- mapinfo用户指南
- Spring入门教程
- 7 Development Projects with the 2007 Microsoft Office System and Windows SharePoint Services 2007.pdf
- Delphi高手突破(官方版).pdf
- 中国DTMF制式来电显示国标
- 软件工程方面的学习课件参考
- IIS6缓冲区超过其配置限制
- 一种新的基于随机hough变换的椭圆检测算法
- Linux0.11内核完全注释.pdf
- eclipse 教程
- linux 18B20驱动程序
