直接RGB-D SLAM中的实时捆绑调整:高效算法与新基准
140 浏览量
更新于2024-06-20
收藏 864KB PDF 举报
本文主要探讨了直接RGB-D SLAM中的捆绑调整问题,这是一种关键的实时定位与地图构建(SLAM)技术。传统上,由于密集RGB-D数据中包含大量的变量,SLAM系统中的捆绑调整(BA)通常采用近似方法,以保持实时性。然而,作者挑战了这一观念,提出了一种新的直接BA算法,旨在实现一个实时的密集RGB-D SLAM系统。
与先前的研究相比,新算法不局限于简单的特征匹配和姿态图优化,而是充分利用了RGB和深度数据中的全部信息。这使得直接方法能够在密集重建中处理更多的优化参数,尽管这原本被认为在实时环境中是不可能的。作者强调了直接RGB-D SLAM对于相机硬件如卷帘快门、RGB和深度传感器的同步以及校准精度的高敏感性。
为了推动直接RGB-D SLAM领域的研究,作者开发了一套新颖且校准良好的基准,特别针对同步全局快门RGB和深度相机设计。这套基准包括训练集、无公共地面真相的测试集,以及在线评估服务,以公正地比较不同方法的表现。实验结果显示,新算法在该基准上表现出色,优于所有评估过的SLAM方法。
通过在TUM RGB-D基准测试中的实验,作者证明了直接BA在密集数据处理上的优势,即使与基于特征的ORB-SLAM2这样的知名系统相比也具有竞争力。整体来看,本文的工作不仅提供了一种高效、实时的直接BA解决方案,还为后续的直接RGB-D SLAM研究提供了有价值的工具和基准。
这个研究不仅提升了SLAM系统的性能,还揭示了在特定硬件配置和同步条件下,直接方法在密集环境中可能取得的优势,对于推动SLAM技术的实际应用具有重要意义。研究人员和开发者可以从这篇文章中学习如何优化直接SLAM系统,提高其在实际环境中的鲁棒性和准确性。
136
方法
真实数据
RGB-D
立体
声
全局快门
同步
IMU
准确的
GT
几何
GT
基准
TUM RGB-D [61]
X
X
(一
)
X
(二)
[57]第五十七话
X
X
X
X
X
X
TUM Mono [12]
X
X
-
CoRBS [66]
X
X
X
X
[24]
第二十四话
X
X
X
X
(三)
[51]第五十一话
X
-
X
X
InteriorNet [37]
X
X
X
X
X
X
X
[21]
第二十一话
X
(四)
X
X
X
X
X
欧洲
RoC MAV [3]
X
X
X
X
X
X
(五)
我们
X
X
X
X
X
X
(六)
X
表1.将选定的现有数据集与我们的新基准进行比较。关于编号条目的说明:(1)加速度计,但没有陀螺仪测量。(2)虽然这个
数据集有一个测试集,但它不太适合进行基准测试,因为它显示了与训练集相同的场景,并且没有在线排行榜。(3)在数据集
的扩展版本中可用[6]。(4)稀疏测量的旋转激光扫描仪是可用的。(5)对于某些序列,结构基础事实可用。(6)运动捕捉系统用于
除了少数训练数据集之外的所有训练数据集,对于这些训练数据集,GT使用运动结构(
参见图
10)获得。秒(五)。
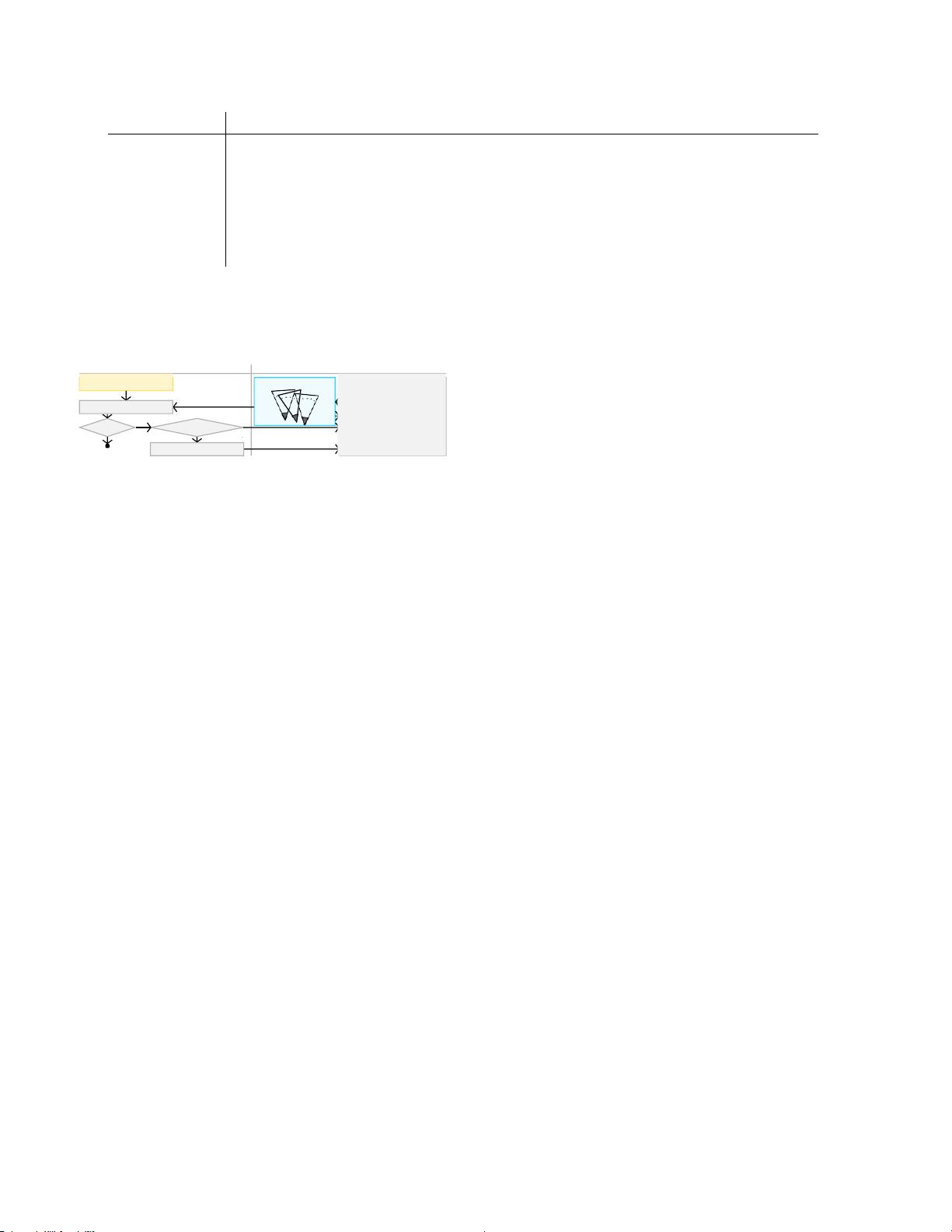
前端
后端
新KF?
是
否
检测到环路
是的
没
有
位姿图优化
跟踪wrt。最后KF
图像
直接
BA
持续优化:姿势,冲
浪,内在
离散曲面更新:创建、
合并、删除
型号(KFs,
surfels
)
输入:RGB-D摄像头
图
2.
方法概述。
KF
代表关键帧。
本文提出了一种新的用于后端的直接RGB-D SLAM的
束调整(BA)策略在下文中,我们将详细描述这一策
略前端遵循一般惯例,将在第2节中简要讨论。4.第一
章
我们的BA战略基于一系列关键概念:我们使用基于
记录的深度图像的几何约束和光度约束。后者使用梯
度,而不是原始像素强度是强大的光度变化。为了实
现有效的优化,我们的方法在细化3D地图和摄像机姿
态之间交替,以最小化在每个时间点考虑的参数的数
量(
参见图
1)。Alg. ①的人。因此,我们是第一个密
集的BA方法,用于RGB-D SLAM,实时运行较小的场
景。在下文中,我们首先描述我们的数据表示,然后
详细介绍我们优化的成本函数和优化过程本身。
3.1.
数据表示
我们用密集
的面元
表示场景几何,并使用
关键帧
来
减少BA的输入数据量。
关键帧
由RGB-D帧及其6DOF相机姿势定义我们对
所有关键帧使用共享的内在校准,其中我们将颜色和
深度传感器单独建模为针孔相机。可选地,我们还对
深度图像变形进行建模,这对于提高典型消费者深度
相机的深度质量很重要[72]。
在我们的方法中,
面元
s是由3D中心点
ps
、表面法向
量
ns
、半径
rs
和标量视觉描述符
ds
定义的定向盘。我们
选择surfels作为场景表示,因为它们可以通过BA有效
地融合和更新,并且可以快速变形以适应循环
在BA期间不需要昂贵的拓扑更新
在BA期间,单纯地优化3D冲浪者位置可能会导致
问题。RGB-D传感器提供在几何形状变化很小的弱纹
理区域中的测量,
例如
,白墙在这些区域中,无论是
光度还是几何描述符都不会约束所有自由度,从而允
许某些曲面在曲面内任意移动。
为了防止潜在
的
伪像,孔,我们因此在优化过程中
限制surfels的移动。[10]建议在其关键帧中固定冲浪的
像素位置,并仅优化其(逆)深度。在实践中,当将
该参数化与通常用于RGB-D SLAM的点到平面残差结
合使用时,我们遇到了问题[73]。特别是对于轮廓和
对象边界,参数化导致与平面相交和几乎平行的视
线,这是病态的。相应地,我们观察到优化将一些
surfel移动到错误的位置。
我们的解决方案是只沿着曲面法线方向移动曲面,
并且只使用具有相似法线的测量来优化它们。这提供
了合理的优化方向,同时避免了定义不清的残差。由
于位置和法线优化交替进行,曲面不限于仅沿其初始
法线移动。
3.2.
成本函数
我们的目标是优化模型的参数定义在第二节。3.1最
大化一致性。这些参数是surfel属性、关键帧姿势和可
选的相机固有参数,而测量值是存储在关键帧中的
(大部分)成本可以按模型的每个元素来衡量(
即
,
Surfel),或输入的(
即
,像素)。由于一个像素可以
对应于多个面元,因此在优化期间非对角Hessian矩阵
可能导致出于效率的原因,我们因此在这项工作中使
用基于模型的方法。
因此,通过将每个surfel投影到
关闭[69]。与基于体素的场景表示(
例如
,[45]),
surfels可以很容易地表示薄表面和场景细节的任意规
模。与网[8]相比
每个关键帧建立与像素测量的对应关系几何和光度残
差测量surfel在其相应位置对深度和颜色建模的效果。
剩余14页未读,继续阅读
2021-08-04 上传
2022-08-04 上传
2021-05-03 上传
点击了解资源详情
2021-09-14 上传
2019-01-21 上传
2021-10-22 上传
2019-09-30 上传
2021-04-29 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
