三维空间机器人路径规划:蚁群算法的应用
需积分: 0 92 浏览量
更新于2024-08-05
收藏 170KB PDF 举报
"基于蚁群算法的三维空间机器人路径规划"
在三维空间机器人的路径规划中,蚁群算法被作为一种有效的解决方案引入。蚁群算法源自对自然界中蚂蚁寻找食物路径的观察,它是一种分布式、自组织的优化算法,能够解决复杂的问题,如旅行商问题、车辆路径问题等。在机器人路径规划领域,蚁群算法的应用可以避免传统方法中建立和搜索数据结构所需的大计算量,尤其适用于实时路径规划,即使在存在动态障碍物的环境中。
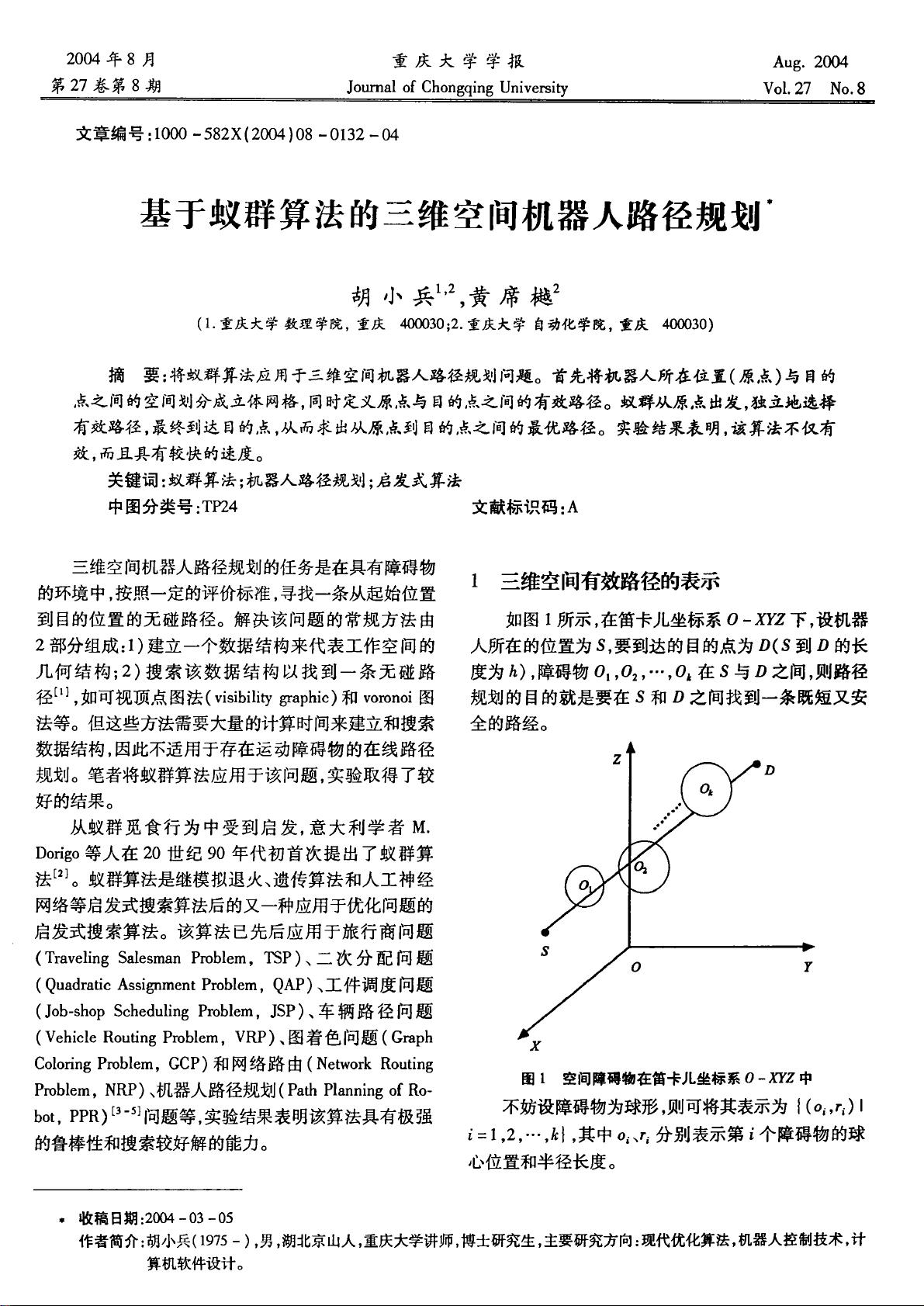
本文中,作者胡小兵和黄席樾将三维空间视为一个立体网格,将机器人初始位置和目标位置之间的空间划分为多个单元,定义了有效路径。每只“虚拟蚂蚁”代表一个可能的路径选择,从起点出发,根据某种启发式规则独立地在网格中移动。这种启发式规则通常基于距离信息和信息素的积累,信息素是蚂蚁在路径上留下的化学痕迹,可以引导其他蚂蚁选择更优路径。
在每一步决策中,蚂蚁依据当前节点上的信息素浓度和距离信息来决定下一步走向哪个相邻节点。随着蚂蚁的移动,信息素会逐渐累积在路径上,并且会随着时间衰减,这样就形成了一个动态调整的过程,使得频繁走过的路径(即较优路径)上的信息素浓度更高,吸引更多的蚂蚁选择。经过多轮迭代后,整个蚂蚁群体能找到从起点到终点的全局最优或近似最优路径。
蚁群算法的优势在于其并行性和自适应性,可以处理大规模问题,并且能自动发现环境中的局部最优解,从而找到接近全局最优的路径。在机器人路径规划问题中,这种特性尤为关键,因为机器人需要在复杂环境中快速找到避障的最短路径。
尽管蚁群算法表现出良好的性能,但也存在一些挑战和局限,如容易陷入局部最优,收敛速度可能较慢,以及需要合适的参数调优。为了改进这些问题,研究者通常会引入精英策略、变异操作、动态调整信息素更新规则等手段,以提高算法的效率和鲁棒性。
基于蚁群算法的三维空间机器人路径规划提供了一种新颖且高效的路径搜索方法,能够在复杂的三维环境中快速找到无碰撞的最优路径,对于动态环境中的实时路径规划具有显著优势。通过不断的研究和优化,该算法有望在未来的机器人导航系统中发挥更大的作用。
维普资讯 http://www.cqvip.com
下载后可阅读完整内容,剩余3页未读,立即下载
2022-07-15 上传
218 浏览量
2018-03-14 上传
2021-10-14 上传
2021-09-10 上传
2021-08-14 上传
364 浏览量
2021-09-30 上传
2021-08-11 上传

BJWcn
- 粉丝: 35
- 资源: 293
 我的内容管理
展开
我的内容管理
展开







最新资源
- Haskell编写的C-Minus编译器针对TM架构实现
- 水电模拟工具HydroElectric开发使用Matlab
- Vue与antd结合的后台管理系统分模块打包技术解析
- 微信小游戏开发新框架:SFramework_LayaAir
- AFO算法与GA/PSO在多式联运路径优化中的应用研究
- MapleLeaflet:Ruby中构建Leaflet.js地图的简易工具
- FontForge安装包下载指南
- 个人博客系统开发:设计、安全与管理功能解析
- SmartWiki-AmazeUI风格:自定义Markdown Wiki系统
- USB虚拟串口驱动助力刻字机高效运行
- 加拿大早期种子投资通用条款清单详解
- SSM与Layui结合的汽车租赁系统
- 探索混沌与精英引导结合的鲸鱼优化算法
- Scala教程详解:代码实例与实践操作指南
- Rails 4.0+ 资产管道集成 Handlebars.js 实例解析
- Python实现Spark计算矩阵向量的余弦相似度
