能源采集推动无线通信最新进展综述
需积分: 1 9 浏览量
更新于2024-07-20
收藏 2.23MB PDF 举报
近年来,随着无线通信技术的不断发展和环保意识的提升,能源采集(Energy Harvesting)在传感器网络中的应用逐渐成为研究热点。本文综述了这一领域的最新进展,由S.Ulukus、A.Yener、E.Erkip、O.Simeone、M.Zorzi、P.Grover和K.Huang等学者共同编撰,关注的是能量自给自足的无线网络设计与优化。
文章首先阐述了无线网络中引入能量采集节点的重要性,这使得设备不再完全依赖外部电源,从而实现了更长时间的运行和更广泛的环境适应性。作者从信息理论的角度探讨了能量采集网络的性能极限,包括传输效率、数据速率和可靠性,这些都是衡量无线通信质量的关键指标。
在技术层面,文中深入研究了能量传输策略,特别是能源合作(Energy Cooperation)的概念,即多个节点之间共享和交换能量,以实现整体能源的协同利用。同时,文章还关注了同时无线信息和能量(SWIPT,Simultaneous Wireless Information and Power Transfer)传输技术,这是一种创新方法,允许在同一个信号传输过程中同时传输数据和提供能量,极大地提高了资源利用率。
文章涵盖了不同规模的网络模型,从微型设备到大规模分布式系统,都对能量消耗模型进行了详尽分析,这对于优化网络架构和设计具有实际指导意义。此外,文章还讨论了节点层面的能量管理策略,如动态调整工作模式、优化能效算法等,以确保在有限的能源条件下实现高效通信。
索引术语中提到了几个核心概念,包括能源采集通信、能源合作以及SWIPT,这些都是推动当前和未来无线网络发展的重要驱动力。通过这些研究,科学家们正在努力突破技术瓶颈,为构建更加绿色、可持续的无线通信网络奠定基础。
这篇综述文章提供了关于能量采集无线通信领域的广泛视角,不仅总结了已有的研究成果,还对未来的研究方向和挑战进行了展望,对于理解和应用能源采集技术的工程师和研究人员来说是一份极具价值的参考资料。
5
curve
tightest
E
0
E
3
E
4
E
5
E
6
E
2
E
1
T
T
!
E
i
tightest
curve
T
T
E
1
E
0
E
2
E
3
E
4
E
5
E
6
!
E
i
(
!
E
i
− E
max
)
+
(a) (b)
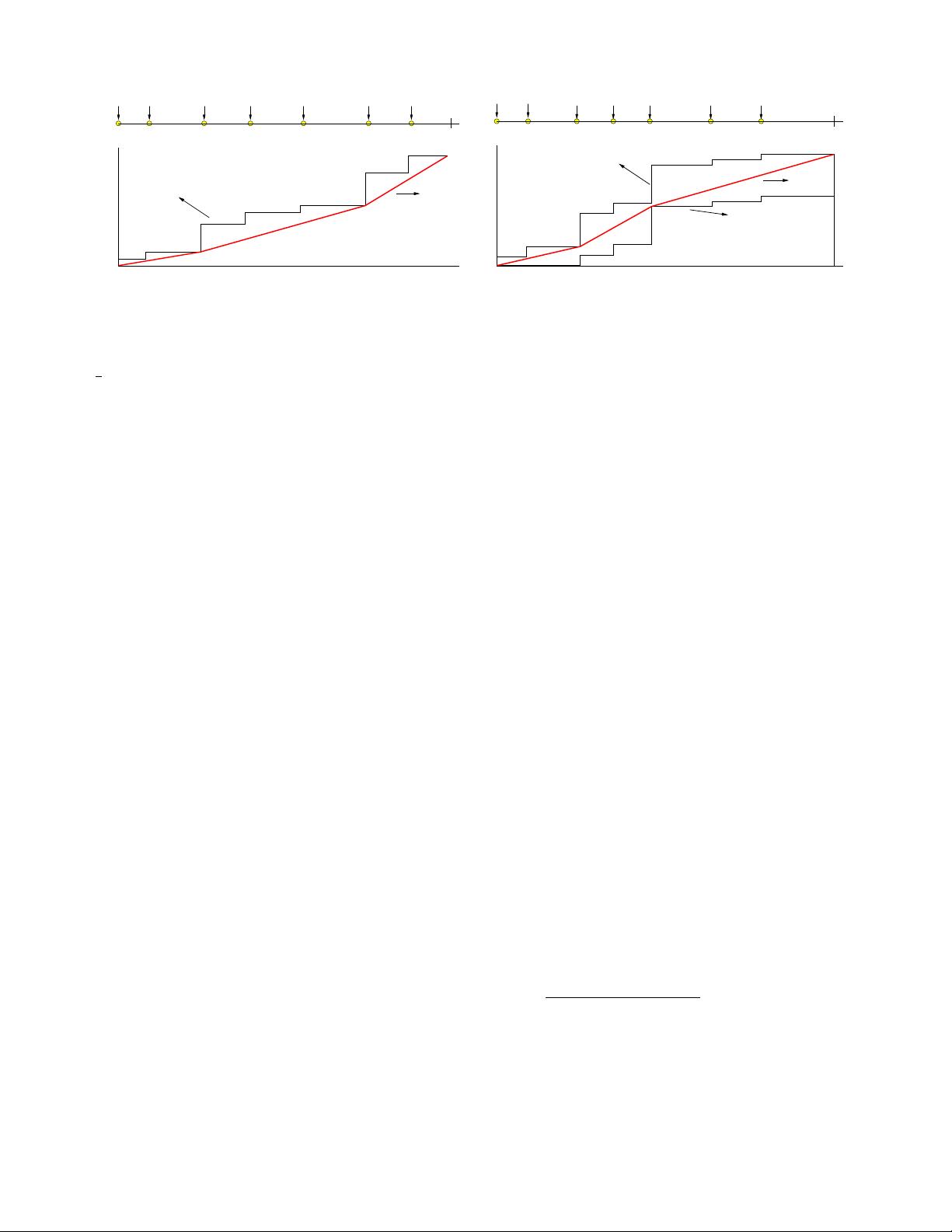
Fig. 4. The optimal policy is the tightest string that connects the two ends. (a) E
max
= ∞. (b) Finite E
max
.
we send a signal with power P in an epoch of duration
`,
`
2
log (1 + hP ) bits of data are served out from the data
backlog with the cost of `P units of energy depletion from
the energy queue. With this model in mind, we solve for the
optimum power control policy P (t) in time as a function of the
energy arrival profile, the data backlog profile and the channel
fading profile, in order to minimize the time by which all
of the packets are successfully transmitted. Minimizing the
transmission completion time for a given number of bits is
equivalent to maximizing the number of bits transmitted in
a given duration. Therefore, in the following, we consider
maximizing the number of bits delivered by a deadline T .
The optimization problem is subject to the energy causality
constraint on the harvested energy, and the finite-storage
constraint on the rechargeable battery. In particular, the energy
causality constraint requires that the energy that has not arrived
yet (has not been harvested yet) cannot be used. The finite-
storage constraint, on the other hand, requires that no energy
is wasted because of battery being full at the time of energy
arrivals; we also call this constraint the no-energy-overflow
constraint. Assume that energies of {E
0
, E
1
, . . . , E
N−1
} are
harvested, and epoch lengths are {`
1
, . . . , `
N−1
}. Due to the
concavity of the rate-power relationship, power must be kept
constant between energy harvests [12]. This reduces the power
control policy of P (t) to a sequence of constant powers
{p
1
, . . . , p
N
}. The energy causality constraints become [12]
k
X
i=1
`
i
p
i
≤
k−1
X
i=0
E
i
, k = 1, . . . , N (5)
and the no-energy-overflow constraints become [13]
k
X
i=0
E
i
−
k
X
i=1
`
i
p
i
≤ E
max
, k = 1, . . . , N − 1 (6)
We illustrate these two constraints on the energy consump-
tion policy in Fig. 3(b). The upper staircase is the cumulative
energy arrival profile which provides the energy causality
upper bound, and the lower staircase is the no-energy-overflow
curve which provides a lower bound. Any feasible energy
consumption curve must lie in between. We note that the
energy causality constraint forces the energy consumption to
slow down not to exceed the harvested amount, while the no-
energy-overflow constraint forces energy consumption to speed
up to open up space in the battery for new energy arrivals.
Although the optimization is over all monotonically non-
decreasing time functions for the energy consumption curve,
by the concavity of the objective function, the optimal policy
must remain constant in between energy harvests; therefore,
the dimension of the optimization problem is reduced to the
finite number of epochs in an interval. Geometrically, this
means that the feasible energy consumption profiles which
are candidates to be optimum must be piece-wise linear. The
optimal policy is shown to be the tightest string that lies in
the energy feasibility tunnel [12], [13]. This solution aims to
keep longest stretches of constant power periods subject to
energy causality and no-energy-overflow constraints, as the
concavity of the power-rate relationship favors constant powers
to the extent possible. An example of the optimum energy
consumption curve is shown in Fig. 4(a) for E
max
= ∞, i.e.,
there is no energy overflow concerns, and in Fig. 4(b) for a
finite E
max
.
An alternative approach to the feasible tunnel approach is
the directional water-filling algorithm presented in [14]. The
directional water-filling algorithm aims to distribute the water
(energy) equally over time, subject to energy causality con-
straints, which introduce the directionality of water (energy)
flow. The directional water-filling algorithm requires walls at
the points of energy arrival, with right permeable water taps
in each wall which allows water to flow only to the right. This
implements the energy causality constraint, i.e., energy can be
saved and used in the future, but the energy that will arrive
in the future cannot be used before it has arrived. In addition,
these taps allow at most E
max
amount of water to flow to the
right. This implements the finite-capacity battery constraint by
avoiding overflows. These are based on the KKT optimality
conditions found from the corresponding convex optimization
problem [14]
p
∗
i
=
1
P
N+1
j=i
λ
j
−
P
N
j=i
µ
j
− 1, i = 1, . . . , N (7)
where λ
i
are the Lagrange multiplier that enforce energy
causality and µ
i
are the Lagrange multipliers that enforce
no-energy-overflow conditions. In the implementation of the
directional water-filling algorithm, first, the taps are kept off,
and transfer from one epoch to the other is not allowed. Then,
the taps are turned on one by one, and at most E
max
−E
i
units
of energy transfer from past to the i+1st epoch is allowed. An
剩余21页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-03-29 上传
2021-02-06 上传
2021-09-23 上传
2021-06-29 上传
2021-06-29 上传

聆听万物说
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
