EtherCAT技术详解与实战指南
" EtherCAT使用手册 V1.03"
该手册详细介绍了EtherCAT技术,这是一种高性能的工业以太网通信协议,广泛应用于自动化领域。以下是手册中的主要知识点:
1. **EtherCAT简介**:
- EtherCAT(Ethernet for Control Automation Technology)是一种实时工业以太网协议,它利用以太网的物理层实现高速、低延迟的数据传输。
- EtherCAT通过在数据包中嵌入控制数据来实现分布式时钟同步,从而确保整个网络的精确时间同步。
- 产品概述中可能涵盖了各种支持EtherCAT的硬件设备,如控制器、从站设备等。
2. **安装与连接**:
- 安装与连线部分详细讲解了如何正确安装EtherCAT设备并建立连接,包括物理连接、接插件规格以及电缆选择的标准。
- 连线部分可能涉及布线规范,如直通线与交叉线的区别,以及如何避免信号干扰。
3. **EtherCAT-EC信息**:
- CANopen over EtherCAT(CoE)是EtherCAT的一个应用层,允许在EtherCAT网络上使用CANopen协议,实现与CANopen设备的兼容。
- EtherCAT从站信息包括了从站设备如何在网络中运作,以及如何通过PDO(Process Data Objects)进行数据交换。
- 网络状态机描述了EtherCAT设备从启动到正常运行的各个状态,这对于理解和诊断网络问题非常有用。
4. **基于分布时钟的网络同步**:
- EtherCAT利用分布时钟技术,使得网络上的所有设备能够保持高精度的时间同步,这对于实时控制应用至关重要。
- 网络同步部分可能详细阐述了如何配置和调整网络以实现最佳同步性能。
5. **CiA402设备规约**:
- CiA402是针对运动控制的CANopen应用层,它定义了设备的行为和通信参数。
- CoE状态机详细说明了设备在不同操作阶段的行为,如初始化、停止、运行等。
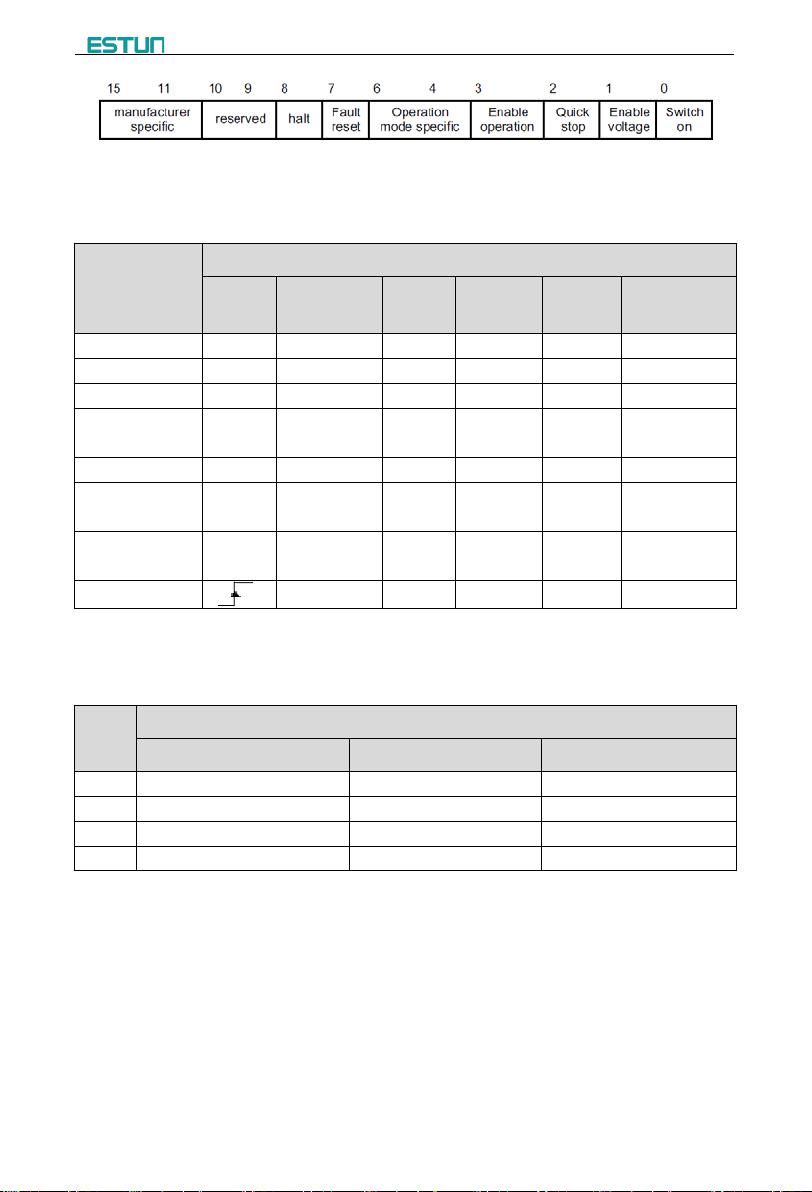
- 设备控制相关参数如controlword、statusword等,用于设备的启动、停止、故障处理等操作。
6. **控制模式**:
- 包括了回零模式、速度控制模式和位置控制模式,这些都是常见的运动控制应用场景。
- 回零模式详细描述了设备如何找到参考点,包括控制字、状态字和相关参数的设定。
- 速度控制和位置控制模式则提供了如何精确控制设备速度和位置的方法,包括控制字、状态字及相关的控制参数。
手册深入浅出地介绍了EtherCAT技术的各个方面,对于理解、配置和调试EtherCAT网络的工程师来说是一份宝贵的参考资料。
EtherCAT
使用手册
13
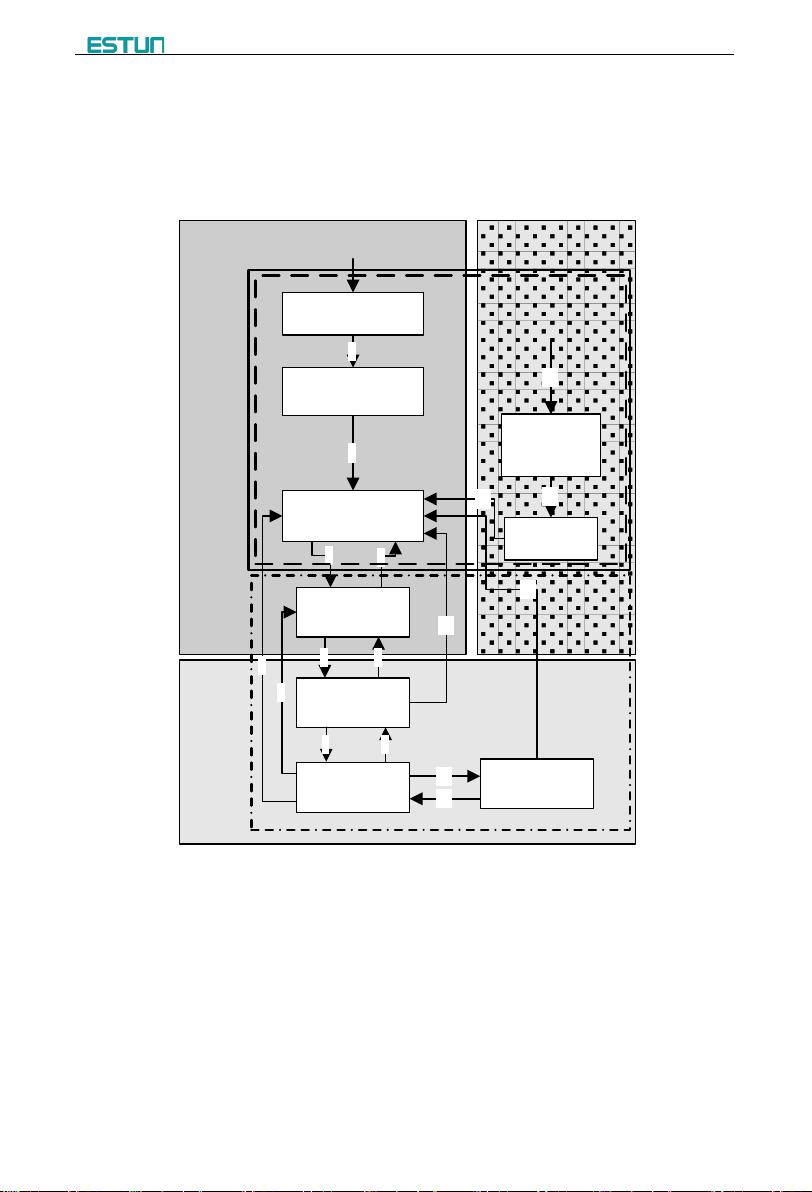
4 基于分布时钟的网络同步
EtherCAT 网络中的一个节点的时钟作为整个网络的参考时钟(系统时钟),为网
络提供系统时间,而从站设备的分布时钟都与这个参考时钟同步。通过分布时钟,可以
实现从站的本地应用程序与参考时钟的同步事件同步。
EC-netX50 模块实现了下面的同步模式。同步模式的切换可以通过同步控制寄存器
(ESC 0x980 和 0x981)进行控制。
Free-Run (ESC register: 0x980 = 0x0000)
这种模式下,本地应用程序周期与通讯周期以及主站周期各自独立。
DC 模式(ESC register: 0x980 = 0x0300))
这种模式下,本地应用程序与 Sync0 时间同步。
Index Sub Name Access
PDO
Mapping
Type Value
0x1C32
Sync Manager channel 2 (process data output) Synchronization
1
Synchronization
type
RO No UINT
Current status
of DC mode
0: Free-run
2: DC Mode
(Synchronous
with Sync0)
2 Cycle time RO No UINT
Sync0 event
cycle [ns]
(The value is
set by master
via ESC
register.)
range:
125000*n (n =
2–16) [ns]
0x1C33
Sync Manager channel 3 (process data input) Synchronization
3
Shift time
RO
No
UINT
-
6
Calc and copy
time
RO No UINT
-
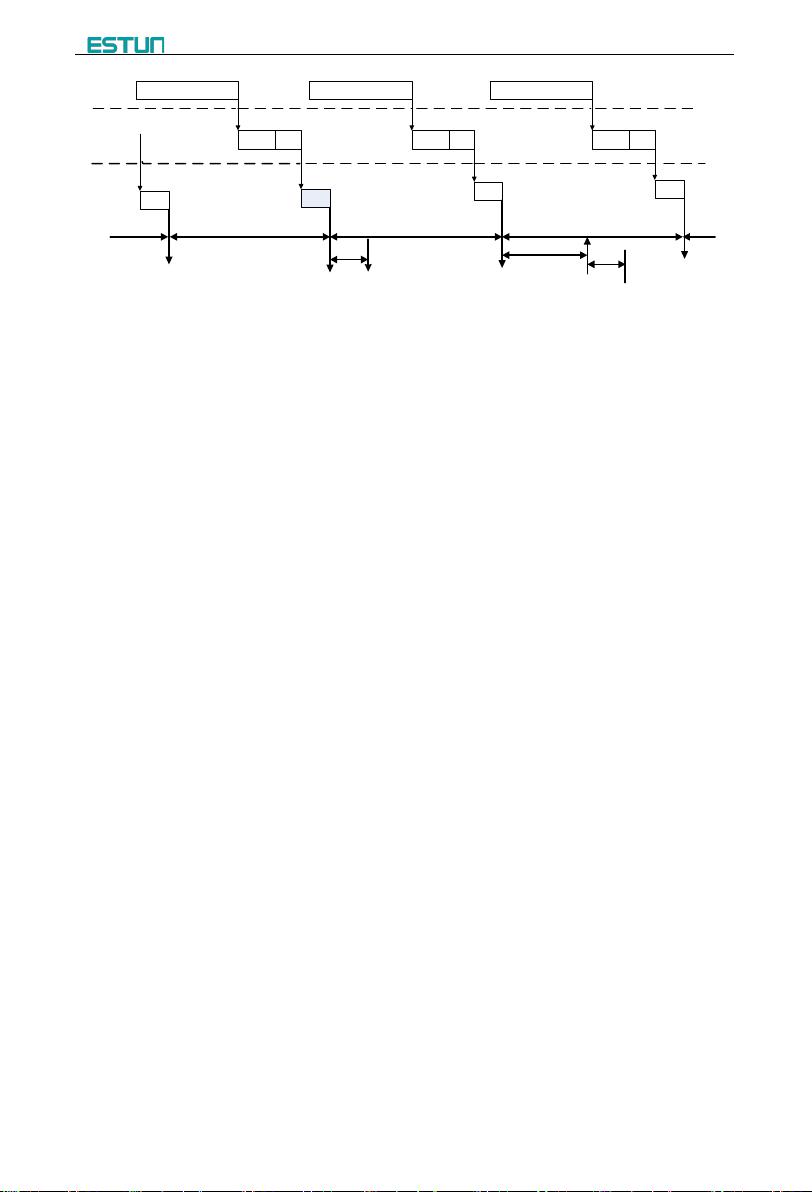
下图为 DC 模式下的时序图。
剩余96页未读,继续阅读
2021-11-29 上传
2018-12-22 上传
2024-01-11 上传
2019-03-21 上传
2024-10-06 上传
2021-08-20 上传
2023-07-14 上传
2012-07-31 上传

dl159357
- 粉丝: 9
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
