CAN通讯入门指南:异步工作原理与实战解析
34 浏览量
更新于2024-08-31
收藏 2.49MB PDF 举报
CAN通讯是一种复杂的工业标准通信协议,专为汽车和工业环境设计,因其异步、半双工特性而区别于同步通讯方式如I2C和SPI。本文带你深入理解CAN通讯的核心知识点。
首先,物理层是CAN通讯的基础。CAN通信基于两条信号线:CAN_HIGH和CAN_LOW,它们共同构建了差分信号系统。与同步通信不同,CAN不需要外部时钟信号保持同步,允许节点在总线上交替发送和接收,但一次只有一个节点主导数据传输,其他节点作为监听者。CAN总线支持两种工作模式:闭环和开环。闭环总线速度快且适合短距离应用,可达1Mbps,最长可达40米;开环模式则适用于更远距离,但速度较低,最高125Kbps,最远可达1公里。
其次,通讯节点在CAN网络中扮演关键角色。尽管CAN不像I2C那样明确区分主机和从机,而是通过数据内容而非地址编码来区分节点,这意味着理论上可以无限扩展节点数量。每个节点由CAN控制器和CAN收发器组成,负责发送和接收信号转换。
发送数据时,控制器发送逻辑信号(0或1),收发器会将其转换为差分信号,确保信号的抗干扰性和有效性。差分信号是CAN通信的核心,它使用CAN_HIGH与CAN_LOW的电压差来表示逻辑1(2.0V)和逻辑0(0V)。隐形电平(0V)对应逻辑1,显性电平(高于隐形电平)对应逻辑0,显性电平具有更高的优先级。
理解CAN通讯需要掌握信号处理细节,如信号的编码、解码以及如何在实际电路中实现信号的发送和接收。对于初学者来说,可能会遇到一些困惑,比如差分信号的概念,但通过逐步学习和实践,可以逐渐掌握这一技术。CAN通讯是一项技术密集型的工作,但它在工业自动化和嵌入式系统中的广泛应用使得掌握它变得至关重要。
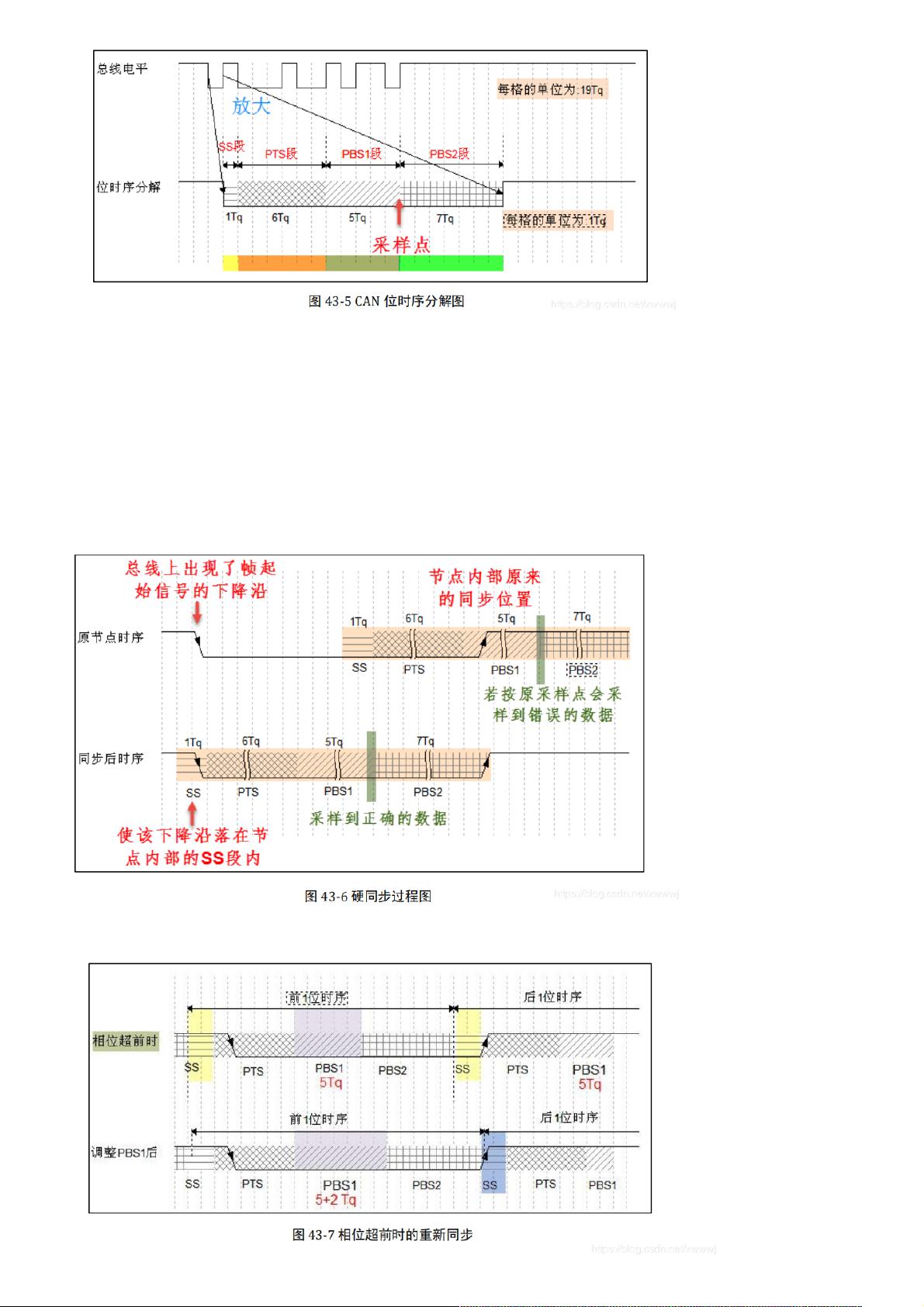
简单介绍一下这四段:
SS段:段: 又叫做同步段,它的作用就是判断节点与总线的时序是否一致,如何判断我们稍后再讲。先留一个疑点。它的长度为1tq,tq就相当于一个时间单位,我们可以规定它的大
小,一般tq=1us.
PTS段:段: 传播时间段,用于补偿网络的延时时间
PBS1,PBS2:: 都是用来补偿阶段的误差。
先了解一下,总之这几个段都是用来校验来确保数据传输准确的。
确定波特率确定波特率
如图43-5所示,一个数据位有19tq,假设1tq=1us
则波特率波特率=1000000/19=52631.6bps
两种位同步方式两种位同步方式
首先我们需要知道的是,当数据开始传输的时候会有一个帧起始信号帧起始信号,这个帧起始信号会产生一个下降沿下降沿(由高变低),正常情况下这个下降沿是在这个下降沿是在SS段的段的,如果不在就需要进行同
步了
硬同步:硬同步:
前面已经说过,下降沿要落在SS段,如图,出现这种情况,我们可以将我们可以将SS段向左平移,让下降沿在段向左平移,让下降沿在SS段内段内。这种情况有一种限制,就是必须要存在帧起始信号。
重新同步重新同步:
剩余11页未读,继续阅读
2022-05-28 上传
2022-05-28 上传
2019-03-07 上传
2018-12-11 上传
点击了解资源详情
2023-04-28 上传
2022-07-15 上传
110 浏览量
2022-09-21 上传

weixin_38720050
- 粉丝: 3
- 资源: 876
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
