IR2184驱动的特种机器人低电压大功率电机控制系统
56 浏览量
更新于2024-09-01
收藏 355KB PDF 举报
"本文主要介绍了针对核辐射应急处理机器人需求设计的一种低电压大功率电机驱动系统,该系统采用IR2184驱动并联MOS管的H桥电路,能够解决驱动过程中的尖峰问题和MOS管并联时的局部过流问题。通过实验验证,驱动电压24V时,能支持最大100A的驱动电流,确保了对特种机器人的高效、灵活控制。"
在核辐射应急处理中,机器人驱动系统需要小巧、高效且灵活。传统的铅屏蔽层虽然能提供抗辐射保护,但会增加机器人的体积和重量。因此,设计一种适用于特种机器人的低电压大功率电机驱动系统至关重要。文中提出的解决方案是利用IR2184驱动器配合并联MOS管构建H桥电路,以实现高效率的电机驱动。H桥电路允许电机的正反转,并且通过并联MOS管可以提高电流承载能力。
针对驱动过程中可能出现的电压尖峰问题,设计了RCD吸收回路。RCD(电阻-电容-二极管)回路可以有效地吸收和衰减电机启动或停止时产生的瞬态电压尖峰,保护电路不受损害。同时,为了解决MOS管并联时可能出现的局部过流,设计了均流保护电路,确保电流在并联的MOS管之间均匀分布,避免单个器件过热或损坏。
系统的核心控制器是STM32微处理器,它生成PWM波来控制IR2184驱动芯片,进而控制H桥上的MOS管。此外,系统还包括串口通信模块、DC-DC隔离电源模块、状态指示模块,以及必要的保护电路,如RCD吸收电路和均流保护电路。
在实际应用中,驱动器需要驱动重约850kg的特种机器人,要求电机输出功率至少1200W,因此驱动器的输出功率设定为1500W,采用24V电池供电,最大驱动电流为100A。实验结果证明,该设计能够有效工作,满足了特种机器人在核辐射环境下的驱动需求,实现了小型化、大功率以及高可靠性的目标。
该文提出的低电压大功率电机驱动系统结合了高效的驱动策略、尖峰电流防护措施和MOS管并联的电流均衡技术,为核辐射应急处理机器人提供了关键的技术支持,具有较高的实用价值。
特种机器人的低电压大功率电机驱动系统设计特种机器人的低电压大功率电机驱动系统设计
针对核辐射应急处理机器人驱动系统体积小、驱动能力强且操控灵活的需求,基于IR2184驱动并联MOS管H桥
电路,设计了一种适用于特种机器人的低电压大功率电机驱动系统。系统针对驱动中的尖峰问题设计了RCD吸
收回路,并针对MOS并联中的局部过流问题设计了均流保护电路。实验表明,驱动电压为24 V时,驱动电流最
大可达100 A,最终实现了对特种机器人的可靠控制。
现阶段电气系统抗核辐射的主要途径是使用铅屏蔽层将控制系统完全包裹起来,以达到屏蔽效果,通常铅屏蔽层厚度约为7
cm。考虑到使用该方式对其进行抗核辐射加固会导致机器人体积庞大且笨重,所以很有必要设计一款适用于核辐射应急处理
机器人的底盘电机驱动系统。
参考文献[1]设计了一款输出功率可达9 kW的电机驱动器,但该驱动器使用了28 V/125 V DC-DC变换器,使得驱动器体积非
常庞大,不适用于核应急处理机器人的底盘电机驱动。参考文献[2]和参考文献[3]均设计了一种输出电压为24 V、电流为10 A
的驱动器,由于其输出功率过小,显然也都不能用于核应急处理机器人的底盘电机驱动。
针对上述问题,本文提出一种使用IR2184驱动且由并联MOS管搭建的H桥大电流电机驱动设计方案。本文针对驱动中的尖
峰问题设计
1 系统方案设计系统方案设计
本设计需要驱动的特种机器人重约850 kg,所以要求底盘电机的输出功率约为1 200 W,因此底盘电机驱动器的输出功率至
少应为1 500 W。机器人只能由自身携带的电池供电,并且要求其机动性强、体积小,所以设计中需使用24 V电池为驱动供
电。根据1.5倍峰值电流的标准[1],本文需设计一个输出电压为24 V、输出电流最大为100 A的驱动器。
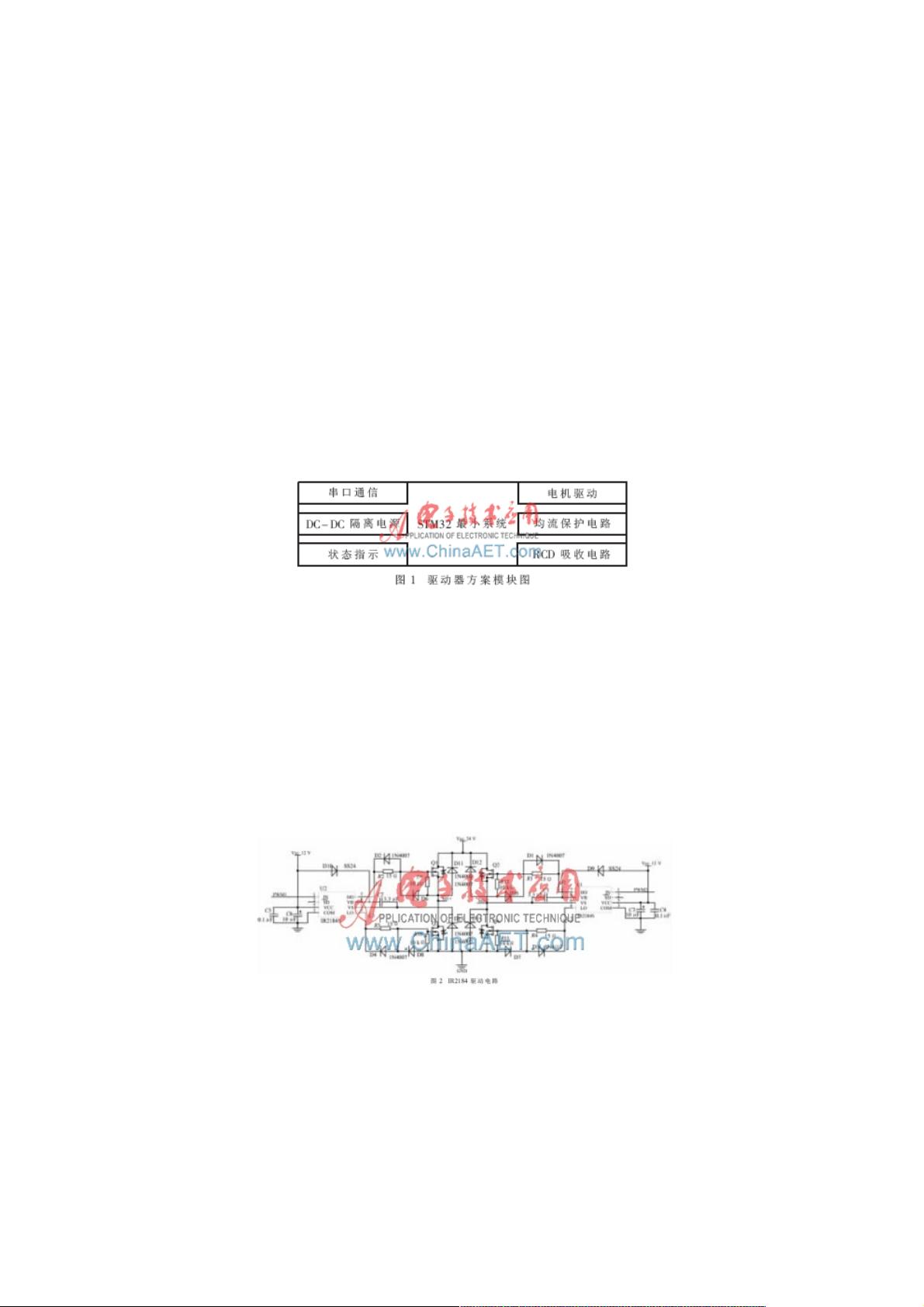
驱动器的整体框图如图1所示,包括STM32最小系统、串口模块、DC-DC隔离电源模块、状态指示模块、电机驱动电路和
RCD吸收电路。
2 硬件电路设计硬件电路设计
本设计以STM32为控制核心,产生PWM波控制栅极驱动芯片IR2184,进而驱动由NMOS并联搭建的H桥。同时本设计使用
RCD吸收电路吸收电机启停中的尖峰,均流保护电路使得并联MOS管间的电流尽量均衡。
2.1 驱动电路设计驱动电路设计
在H桥中,要使NMOS管完全导通,要求VGS>10 V。对于下桥臂,直接加10 V以上的电压就可使NMOS导通;但对上桥
臂,要使NMOS导通,就必须满足VG>VSS+10 V。因此必须使用浮动栅极驱动,才能使得上桥臂导通。栅极驱动芯片IR2184
是悬浮栅极驱动芯片,具有自动死区时间控制,所以本设计使用其作为NMOS的驱动芯片。
图2是IR2184的自举驱动电路,由2片IR2184驱动一个由IRFP3206构成的H桥电路,实现对电机的正反转控制。其
中,PWM1、PWM2是STM32产生的PWM经光耦隔离之后用来进行电机速度控制的信号;D1~D4为泄放二极管,作用是在没
有栅极驱动信号时迅速泄放掉输入电容中的电荷;D5~D8为12 V的稳压二极管,用作钳位,以确保VGS电压正常,进而保证
MOS管驱动正常;D11~D14为续流二极管,用于增加MOS管的续流能力;R9~R12为下拉电阻;C3~C6为电源滤波电容,用
于维持IR2184电源的稳定。
C1、C2为自举电容,D9、D10为自举二极管。参数选择如下[4]:
(1)自举电容的电容值选取
在本设计中,自举电容的容量由式(2)决定,根据IRFP3206的数据手册知,Qg=170 nC,IGSS=100 nA。同时在本设计中
VCC=12 V,Vf=1.3 V,VLS=0.7 V,QIS=5 nC,f=1 kHz,于是C1、C2的最小值为1.2 μF,故本设计中使用
下载后可阅读完整内容,剩余3页未读,立即下载
2012-03-03 上传
2021-08-14 上传
2021-01-20 上传
2020-10-15 上传
2023-07-12 上传
2021-04-22 上传
2018-11-25 上传
点击了解资源详情

weixin_38736011
- 粉丝: 3
- 资源: 920
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
