西门子S7-1200与安川机器人EthernetIP通信实战指南
版权申诉
该文档提供了一个详细的示例,说明如何使用西门子S7-1200 PLC的LRCF通信库与安川YRC1000机器人通过Ethernet/IP进行通信。此过程适用于S7-1200 1214CDC/DC/DC系统版本4.5及以上的PLC,且需要使用TIA Portal V17软件。在配置过程中,PLC作为主站,机器人作为从站。
**西门子S7-1200与安川机器人Ethernet/IP通信的关键步骤:**
1. **硬件准备**:
- PLC:西门子S7-1200 1214CDC/DC/DC
- 机器人控制柜:安川YRC1000
- 需要软件支持:TIA Portal V17
2. **机器人侧设置**:
- 安川YRC1000需开启Ethernet/IP功能,并在维护模式下进入管理模式,激活相关选项。
- 在适配器详细设置中,配置从站信息,包括IO单元的设定。
3. **PLC侧设置**:
- 使用LRCF库,这是一个专用于通过EtherNet/IP协议与机器人通信的参数配置功能块。
- 在PLC程序中,配置LRCF功能块,设定适当的通信参数,如通信延迟(in_RPin引脚值设为100ms)。
4. **监控与测试**:
- 添加监控表,监控输入和输出地址。
- 修改Q地址的值,观察机器人响应,验证通信是否正常。
- 检查信号状态,确保PLC和机器人之间的输入输出信号同步。
**LRCF功能块的引脚简要说明:**
- LRCF库的功能块包含多个引脚,每个引脚都有特定作用,例如设置通信参数、数据传输和错误处理等。
**参考资料:**
- 西门子官方文档:LRCF库适用于TIA博途V17的Ethernet/IP通信-扫描器库文件
- 安川机器人官方文档:西门子1500系列PLC与安川YRC1000机器人进行Ethernet/IP通信教程
在实际操作中,确保遵循上述步骤,并参考提供的官方文档,以确保正确配置和无故障通信。由于通信延迟设置(in_RPin引脚值)对于保持数据同步至关重要,因此务必正确设定。此外,遇到问题时,检查网络连接、硬件设置和通信协议配置都是排查问题的关键步骤。
西门子 S7-1200 使用 LRCF 库与安川机器人进行 EthernetIP 通信的具体方法示例
准备条件:
PLC:S7-1200 1214C DC/DC/DC 系统版本 4.5 及以上。
机器人控制柜:安川 YRC1000。
软件:TIA V17
PLC 做主站,机器人做从站。
具体方法可参考以下内容:
1.使用的库文件为西门子 1200 系列 PLC 与机器人通过 EtherNet/IP 协议通信时的参数配
置功能块。
机器人侧 Ethernet/IP 设定
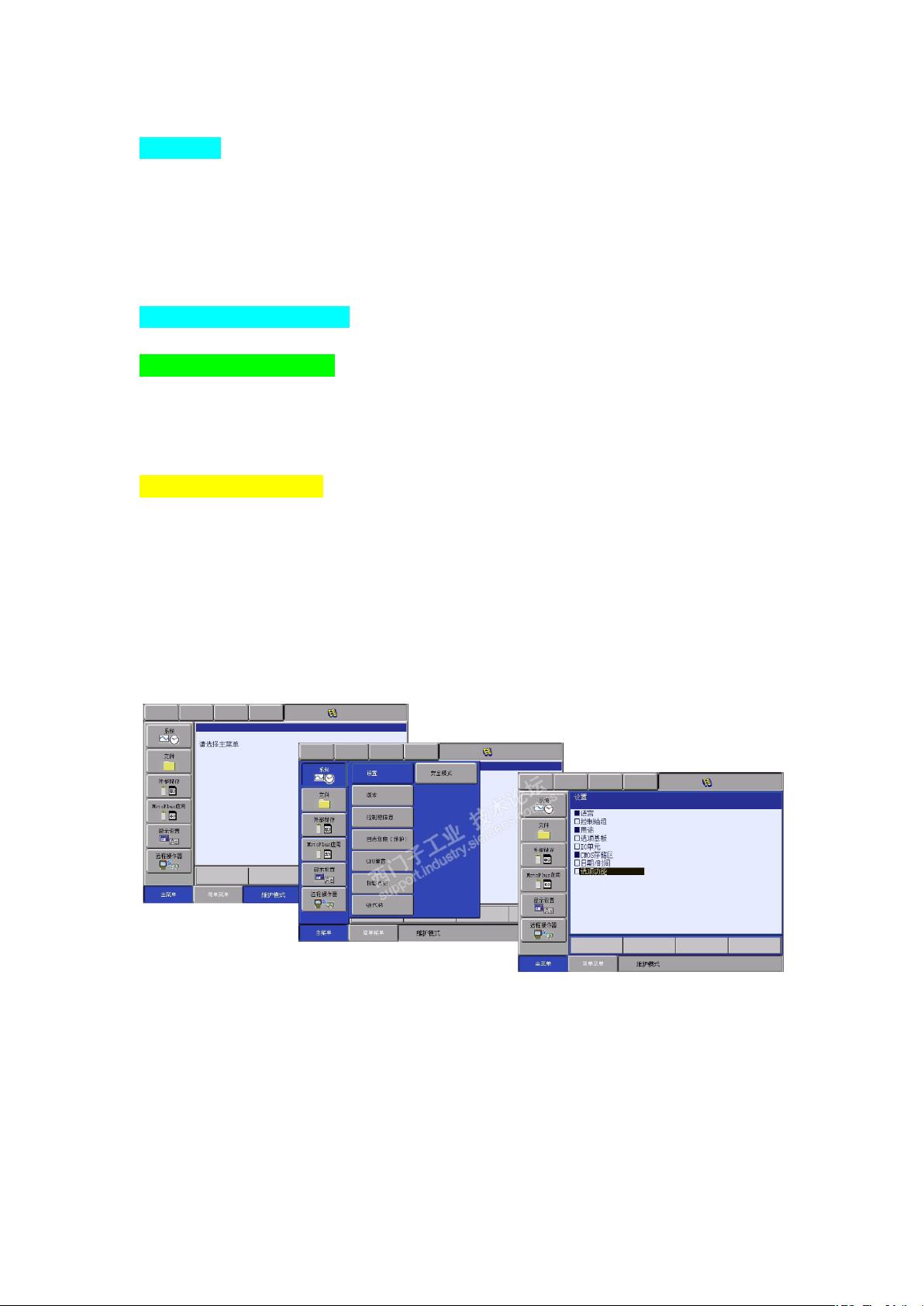
1.2 机器人开通 Ethernet/IP 功能后,按下图设定。
按住示教器主菜单键,开启机器人电源,进入维护模式。
然后再进入管理模式。找到选项功能菜单。
( Ethernet/IP 是选项功能需申请厂家开通)
1.4 机器人做从站,在适配器详细里设置信息,设定后按回车键,确认修改。
下载后可阅读完整内容,剩余4页未读,立即下载
2023-09-25 上传
2023-04-25 上传
2024-08-30 上传
2024-12-27 上传
2024-12-27 上传

AAA_自动化工程师
- 粉丝: 7118
- 资源: 3479
 我的内容管理
展开
我的内容管理
展开







