VINS-mono算法解析:特征点跟踪与初始化详解
需积分: 0 162 浏览量
更新于2024-01-23
收藏 1.2MB PDF 举报
VINS-mono是一种基于紧耦合方法的开源VIO(Visual-Inertial Odometry)算法,它通过单目IMU恢复出尺度,具有很好的效果。通过阅读VINS-mono的源码和参考文献,结合算法理论推导,本文总结了VINS-mono的详细解读,旨在与对VINS-mono有一定了解的SLAM算法工程师分享。
文章首先介绍了VINS-mono的特征点跟踪过程。在首帧图像上,使用cv::goodFeaturesToTrack方法找到最强的150个特征点,并进行非极大值抑制,抑制半径为30。每个新特征点都有自己的对应ID。然后,在下一帧图像中,使用光流法对这些特征点进行跟踪,找到匹配点。随后,对前后帧之间的匹配点进行校正。先对特征点进行畸变校正,然后将其投影到以原点为球心,半径为1的球面上,并延伸到深度归一化平面上。
初始化是VINS-mono中的一个重要步骤。首先,通过特征点跟踪和对极几何计算,获取到第二帧和第一帧之间的R、t关系。然后,通过三角化得到初始的特征点深度,并通过RANSAC算法进行外点剔除,得到较为准确的初始位姿。
除了初始化,VINS-mono还包括了正常的跟踪过程。在每一帧中,首先通过预测当前状态的方法获取当前帧的位姿估计和IMU预积分的数据。然后,通过特征点跟踪和对极几何计算,获取当前帧与上一帧之间的R、t关系。接着,在根据IMU预积分数据进行误差优化的过程中,得到更精确的位姿估计。最后,通过滑动窗口优化的方式,结合历史帧的信息,对位姿进行后端优化。
其中,信任深度相机是VINS-mono中的一个关键步骤。通过使用深度相机,可以对特征点的深度进行估计,提高位姿估计的精度。在深度相机不可用的情况下,也可以通过特征点的运动和三角化得到深度信息。
综上所述,VINS-mono通过特征点跟踪、初始化和正常的跟踪等步骤,实现了对相机的位姿估计。它的优点是通过单目IMU恢复尺度,不需要外部参考进行尺度初始化,具有较好的鲁棒性和精度。然而,由于VINS-mono中有很多实现细节,阅读本文之前建议先通读VINS-mono的源码。希望本文能对对VINS-mono有一定了解的SLAM算法工程师有所帮助。
的
位
置
,
是
SFM
位
置
通
過
外
參
計
算
過
來
,
給
的
。
機
器
⼈
⼿
眼
標
定
。
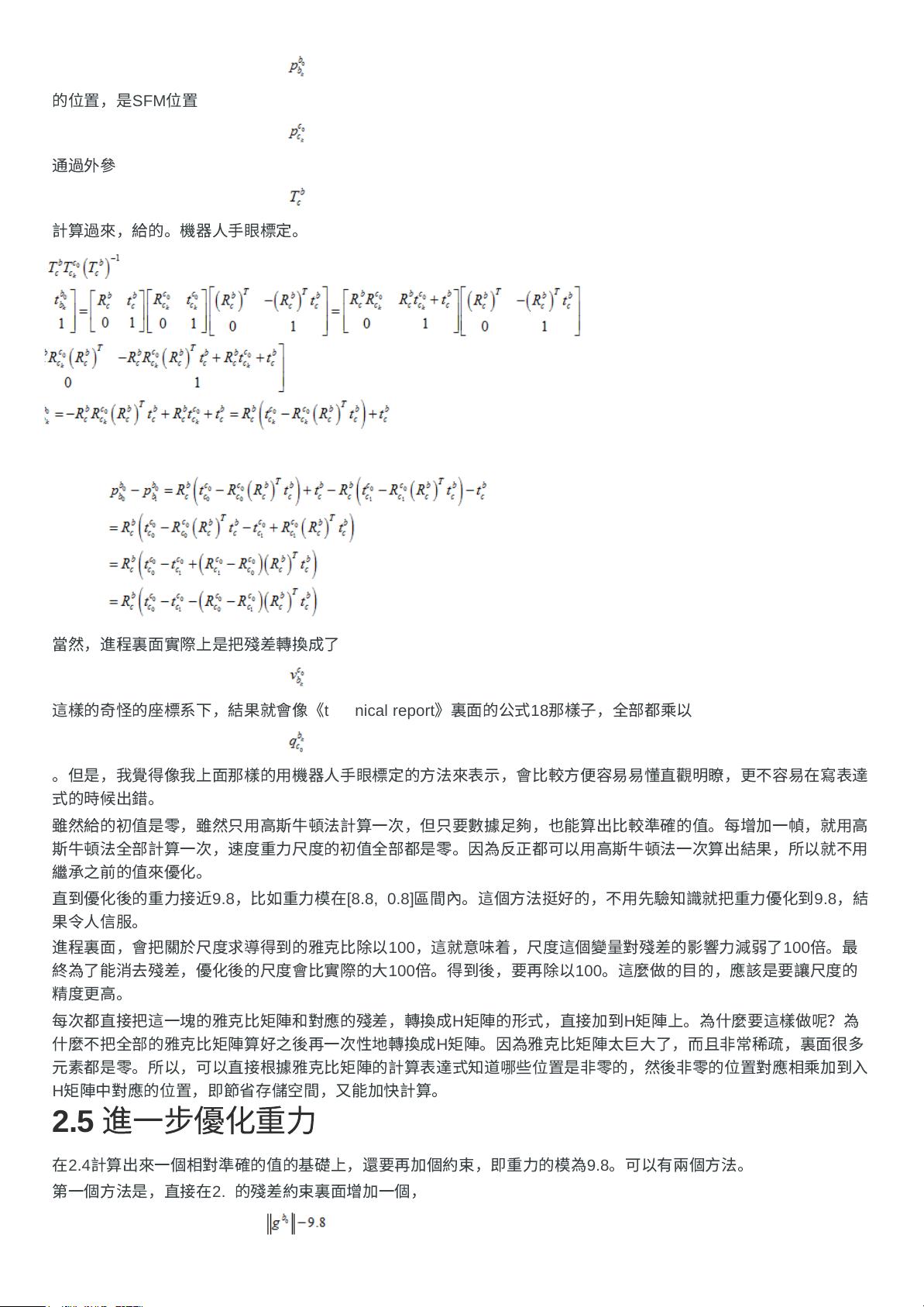
當
然
,
進
程
裏
⾯
實
際
上
是
把
殘
差
轉
換
成
了
這
樣
的
奇
怪
的
座
標
系
下
,
結
果
就
會
像
《
technical report
》
裏
⾯
的
公
式
18
那
樣
⼦
,
全
部都
乘以
。
但
是
,
我
覺
得
像
我
上
⾯
那
樣
的
⽤
機
器
⼈
⼿
眼
標
定
的
⽅
法
來
表
⽰
,
會
⽐
較
⽅
便
容
易易
懂
直
觀
明
瞭
,
更
不
容
易
在
寫
表
達
式
的
時
候
出
錯
。
雖
然
給
的
初
值
是
零
,
雖
然
只
⽤
⾼
斯
⽜
頓
法
計
算
⼀
次
,
但
只
要
數
據
⾜
夠
,
也
能
算
出
⽐
較
準
確
的
值
。
每
增
加
⼀
幀
,
就
⽤
⾼
斯
⽜
頓
法
全
部
計
算
⼀
次
,
速
度
重
⼒
尺
度
的
初
值
全
部都
是
零
。
因
為
反
正
都
可
以
⽤
⾼
斯
⽜
頓
法
⼀
次
算
出
結
果
,
所
以
就
不
⽤
繼
承
之
前
的
值
來
優
化
。
直
到
優
化
後
的
重
⼒
接
近
9.8
,
⽐
如
重
⼒
模
在
[8.8,10.8]
區
間
內
。
這
個
⽅
法
挺
好
的
,
不
⽤
先
驗
知
識
就
把
重
⼒
優
化
到
9.8
,
結
果
令⼈
信
服
。
進
程
裏
⾯
,
會
把
關
於
尺
度
求
導
得
到
的
雅
克
⽐
除
以
100
,
這
就
意
味
着
,
尺
度
這
個
變
量
對
殘
差
的
影
響
⼒
減
弱
了
100
倍
。
最
終
為
了
能
消
去
殘
差
,
優
化
後
的
尺
度
會
⽐
實
際
的
⼤
100
倍
。
得
到
後
,
要
再
除
以
100
。
這
麼
做
的⽬的
,
應
該
是
要
讓
尺
度
的
精
度
更
⾼
。
每
次
都
直
接
把
這
⼀
塊
的
雅
克
⽐
矩
陣
和
對
應
的
殘
差
,
轉
換
成
H
矩
陣
的
形
式
,
直
接
加
到
H
矩
陣
上
。
為
什
麼
要
這
樣
做
呢
?
為
什
麼
不
把
全
部
的
雅
克
⽐
矩
陣
算
好
之
後
再
⼀
次
性
地
轉
換
成
H
矩
陣
。
因
為
雅
克
⽐
矩
陣
太
巨
⼤
了
,
⽽
且
⾮
常
稀
疏
,
裏
⾯
很
多
元
素
都
是
零
。
所
以
,
可
以
直
接
根
據
雅
克
⽐
矩
陣
的
計
算
表
達
式
知
道
哪
些
位
置
是
⾮
零
的
,
然
後
⾮
零
的
位
置
對
應
相
乘
加
到
⼊
H
矩
陣
中
對
應
的
位
置
,
即
節
省
存
儲
空
間
,
⼜
能
加
快
計
算
。
2.5
進
⼀
步
優
化
重
⼒
在
2.4
計
算
出
來
⼀
個
相
對
準
確
的
值
的
基
礎
上
,
還
要
再
加
個
約
束
,
即
重
⼒
的
模
為
9.8
。
可
以
有
兩
個
⽅
法
。
第
⼀
個
⽅
法
是
,
直
接
在
2.4
的
殘
差
約
束
裏
⾯
增
加
⼀
個
,
剩余16页未读,继续阅读
186 浏览量
271 浏览量
视觉SLAM之VINS-Mono:基于紧耦合VIO状态估计的全面解决方案,含安装配置、编译运行指南、中文注释代码及思维导图,视觉SLAM之VINS-Mono , VINS-Mono是基于紧耦合的VIO
2025-01-23 上传
223 浏览量
219 浏览量
101 浏览量

永远的12
- 粉丝: 1169
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android平台DoKV:小巧强大Key-Value管理框架介绍
- Java图书管理系统源码与MySQL的无缝结合
- C语言实现JSON与结构体间的互转功能
- 快速标签插件:将构建信息轻松嵌入Java应用
- kimsoft-jscalendar:多语言、兼容主流浏览器的日历控件
- RxJava实现Android多线程下载与断点续传工具
- 直观示例展示JQuery UI插件强大功能
- Visual Studio代码PPA在Ubuntu中的安装指南
- 电子通信毕业设计必备:元器件与芯片资料大全
- LCD1602显示模块编程入门教程
- MySQL5.5安装教程与界面展示软件下载
- React Redux SweetAlert集成指南:增强交互与API简化
- .NET 2.0实现JSON数据生成与解析教程
- 上海交通大学计算机体系结构精品课件
- VC++开发的屏幕键盘工具与源码解析
- Android高效多线程图片下载与缓存解决方案
