FANUC M20iA视觉系统详解:机器人抓取应用与iRVision功能介绍
需积分: 25 117 浏览量
更新于2024-07-18
5
收藏 5.09MB PDF 举报
FANUC-M20iA视觉系统教程详细介绍了FANUC机器人与相机协作进行视觉引导下的抓取操作,重点在于其内置的iRVision功能。iRVision是一种先进的机器视觉解决方案,它能够通过不同的补偿和测量方式进行目标定位和动作控制。
1. **Offset补偿和检测方式**:
iRVision提供了多种补偿方式,包括用户坐标系补偿(UserFrameOffset)和工具坐标系补偿(ToolFrameOffset),前者适用于在用户定义的参考平面上调整机器人抓取位置,后者则在机器人工具坐标系下确保目标放置的准确性。测量方式根据目标特征分为2D单视野(2DSingle-View)、2.5D单视野(2.5DSingle-View/Depalletization)和3D单视野(3DSingle-View)以及3D多视野(3DMulti-View)检测。2D检测仅限于平面移动,而2.5D和3D检测可以处理更多的三维信息,如Z轴高度变化和全方位旋转角度。
2. **相机固定方式**:
iRVision支持固定相机安装,这使得相机可以在机器人运动时持续监控,便于实时反馈。但这种安装方式的缺点是检测区域固定,若相机位置发生改变,可能需要重新校准(cameracalibration)以确保精确性。另一种是可移动相机,灵活性更高,但可能需要更复杂的电缆布局,并且对机器人动作的同步要求较高。
3. **应用场景与操作小结**:
上汽集团临港的机器人视觉系统采用iRVision技术,通过结合不同类型的补偿和检测,实现精确的机器人抓取、放置和抓取目标定位,从而提升生产过程中的自动化水平和精度。操作时,需理解每种功能的适用场景,并根据实际任务需求选择合适的补偿和测量方法。
FANUC-M20iA视觉系统教程提供了深入的iRVision技术指导,对于在工业自动化领域使用FANUC机器人进行高精度抓取任务的企业或工程师来说,理解和掌握这些功能至关重要。通过优化设置,用户可以有效提高生产效率和产品质量。
上海诣谱自动化装备有限公司
iRVision 操作小结
5 / 22
3 iRVision 一般设置
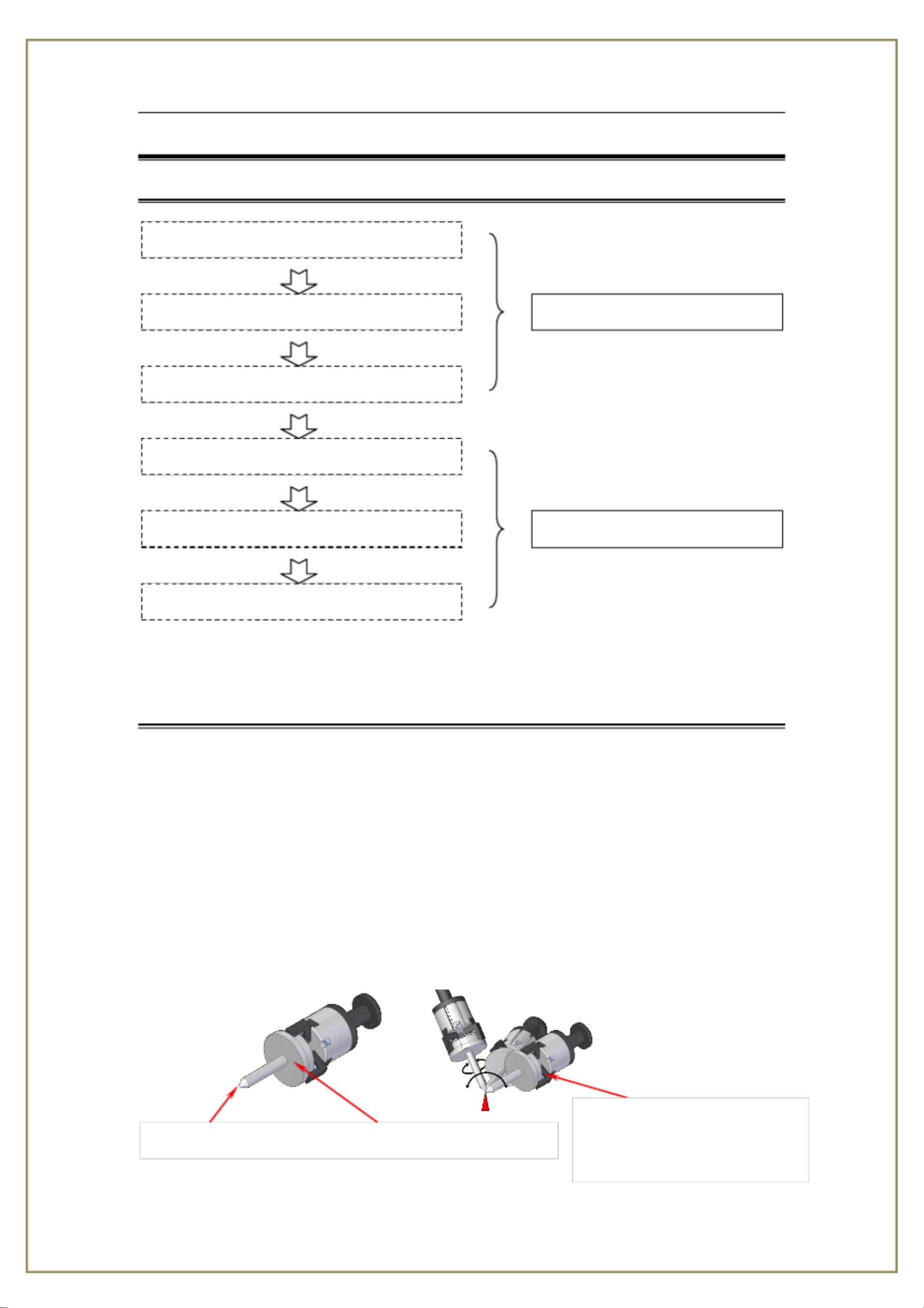
3.1 iRVision 一般流程
3.2 示教用户坐标系 (Application User Frame)
1) 机器人工具坐标系标定 (TCP)
使用 6 点法标定一个准确的机器人工具坐标系 (TCP) 。
- 在作成用户坐标系和照相机标定时,必须使用点对点的示教形
式,所以我们需要一个准确的 TCP 。
- 对 TCP 选择哪一个点并无特别要求, 一般, 我们选择把示教用
针安置在机器人手爪上,以针的顶端为 TCP 原点。
- 使用精度高的示教用针将节省再次示教时间。
- TCP 的精度高低将影响整个 iRVision 的精度,请准确的进行
TCP 的示教并确认其准确性,因为对 TCP 的方向性无要求,
三点法也可以使用。
示教应用用户坐标系 (Application User Frame)
设置照相机 (Camera Setup)
标定照相机 (Camera Calibration)
示教 Vision 程序 (Vision Process)
示教机器人程序 (TP Program)
设置参考点 (Reference Position)
步骤 1~3 对所有 Vision 都适用
根据不同 Vision 应用有所不同
使用精度高的三爪卡盘和唯一的针以针顶端为原点设置 TCP
改变机器人姿态,调整手爪方向性
确认 TCP 的准确性,TCP 精度会影
响 Vision 的精度
剩余21页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-10-20 上传
2018-12-28 上传
2018-05-07 上传
2022-06-30 上传
2022-10-24 上传
2022-10-24 上传

大头军军
- 粉丝: 94
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Cucumber-JVM模板项目快速入门教程
- ECharts打造公司组织架构可视化展示
- DC Water Alerts 数据开放平台介绍
- 图形化编程打造智能家居控制系统
- 个人网站构建:使用CSS实现风格化布局
- 使用CANBUS控制LED灯柱颜色的Matlab代码实现
- ACTCMS管理系统安装与更新教程
- 快速查看IP地址及地理位置信息的View My IP插件
- Pandas库助力数据分析与编程效率提升
- Python实现k均值聚类音乐数据可视化分析
- formdotcom打造高效网络表单解决方案
- 仿京东套餐购买列表源码DYCPackage解析
- 开源管理工具orgParty:面向PartySur的多功能应用程序
- Flutter时间跟踪应用Time_tracker入门教程
- AngularJS实现自定义滑动项目及动作指南
- 掌握C++编译时打印:compile-time-printer的使用与原理
