LFMCW雷达在汽车防撞中的应用与实现
48 浏览量
更新于2024-08-29
收藏 290KB PDF 举报
"应用于汽车防撞处理中的LFMCW雷达系统的设计与实现"
在现代交通环境中,汽车防撞技术已经成为提升交通安全和智能驾驶水平的重要手段。LFMCW(连续波线性调频)雷达系统是这类技术的核心部分,它通过测量前方障碍物的距离和相对速度,为汽车提供关键的避撞信息。LFMCW雷达利用连续发射的微波信号,通过频率的变化来获取目标的距离和速度信息,从而实现精确的测距和测速功能。
在设计LFMCW雷达系统时,首先要考虑的是安全行车距离的设定。安全行车距离是指在同一条车道上,后车与前车保持的距离,以确保即使在紧急情况下也能避免追尾事故,同时不影响道路的通行效率。计算安全行车距离涉及到多个参数,包括本车速度v、驾驶员的反应时间t、轮胎与道路的附着系数φ以及系统调整系数η。
本车速度v可以通过车辆上的速度传感器实时获取,确保数据的准确性。反应时间t是驾驶员从发现危险到开始采取行动的时间,通常在0.30至1.10秒之间,加上刹车系统响应时间,总反应时间大约在1.30至1.98秒。轮胎与道路的附着系数φ影响车辆的制动性能,不同的路面条件会有不同的附着系数,例如干燥混凝土路面的附着系数较高,而湿滑路面则较低。系统调整系数η是一个人为设定的参数,用来反映驾驶员的安全偏好,一般取值在1.05至1.10之间,较大的η值意味着更保守的安全距离。
此外,安全间距d0也是一个关键因素,它是在两车都完全停止时保持的安全距离,以防止后车因惯性而撞击前车。这个距离需要根据车辆的制动性能、道路状况和预期的紧急情况来设定。
LFMCW雷达系统的设计还包括信号处理算法的优化,以准确解析接收到的回波信号,快速计算出目标的距离和相对速度。这些信息会被实时传输到车辆的控制系统,以便在检测到潜在碰撞风险时,系统可以及时发出警告或自动执行紧急制动等预设操作,从而减少由于驾驶员疲劳、分心或误判导致的交通事故。
LFMCW雷达系统在汽车防撞中的应用,结合了先进的雷达技术与对安全距离的理解,为实现智能驾驶和提高道路安全性提供了强大的技术支持。通过持续的技术创新和系统优化,未来这种雷达系统有望在更多汽车上得到普及,进一步提升道路交通的安全性和效率。
应用于汽车防撞处理中的应用于汽车防撞处理中的LFMCW雷达系统的设计与实现雷达系统的设计与实现
随着国民经济的发展,汽车的数量日益增多,汽车运输愈加繁忙,但同时交通事故也屡见不鲜。因此发展汽车
防撞技术,对提高汽车智能化水平有重要意义。汽车要避撞就必须凭借一定的装备测量前方障碍物的距离,并
迅速反馈给汽车,以在危急的情况下,通过报警或自动进行某项预设定操作如紧急制动等,来避免由于驾驶员
疲劳、疏忽、错误判断所造成的交通事故。本文将防撞技术的关键点着眼于车辆测距技术。从测量距离和相对
速度两个角度出发,实现有效防撞的效果。 1、安全距离的相关研究与设定 1.1 参数确定 所谓安
全行车距离就是指在同一条车道上,同向行驶前后两车间的距离(后车车头与前车车尾间的距离),保持既不
发生追尾事故,又不降
随着国民经济的发展,汽车的数量日益增多,汽车运输愈加繁忙,但同时交通事故也屡见不鲜。因此发展汽车防撞技术,
对提高汽车智能化水平有重要意义。汽车要避撞就必须凭借一定的装备测量前方障碍物的距离,并迅速反馈给汽车,以在危急
的情况下,通过报警或自动进行某项预设定操作如紧急制动等,来避免由于驾驶员疲劳、疏忽、错误判断所造成的交通事故。
本文将防撞技术的关键点着眼于车辆测距技术。从测量距离和相对速度两个角度出发,实现有效防撞的效果。
1、安全距离的相关研究与设定
1.1 参数确定
所谓安全行车距离就是指在同一条车道上,同向行驶前后两车间的距离(后车车头与前车车尾间的距离),保持既不发生
追尾事故,又不降低道路通行能力的适当距离。由安全距离的计算公式:
d*=η/(vt+v2/254φ) (1)
可知要求得安全行车距离,需要确定的参数有本车速度v、反应时间t、轮胎与道路的附着系数φ、系统调整系数η。
1)本车速度v
利用汽车防撞系统的车速传感器可测得实时值。
2)反应时间t
据有关测定,一般来说,大多数驾驶员的反应时间在0.30~1100 s之间,再加上刹车系统发生作用的时间等因素,总的
反应时间在1.30~1.98 s之间,即取值为1.30~1.98 s。
3)轮胎与道路的附着系数φ
不同路面的附着系数如表1所示。
4)系统调整系数η
为了安全,驾驶员要根据自己对安全效果的不同要求来设置调整系数η。如果比较保守,要选择η值大些。η取值范围为
1.05~1.10,通常取1.10。
5)安全间距d0
两车制动停止时应保持一定的间距d0以保证安全。d0选择得是否合理,对系统的虚警率有一定的影响。理想情况可以为
0,但国内外的资料上一般为2~5 m,出于安全考虑取为5 m。
1.2 系统模型的实现过程
给定一个汽车防撞系统,根据各参数的影响因素和取值范围,设定相应参数:t=1.8 s;η=1.10;d0=5 m。在行车过程
中,根据路面类型的不同,参照表1的数据来设定轮胎与道路的附着系数φ。根据计算可得,在速度相同时,不同的路面情况
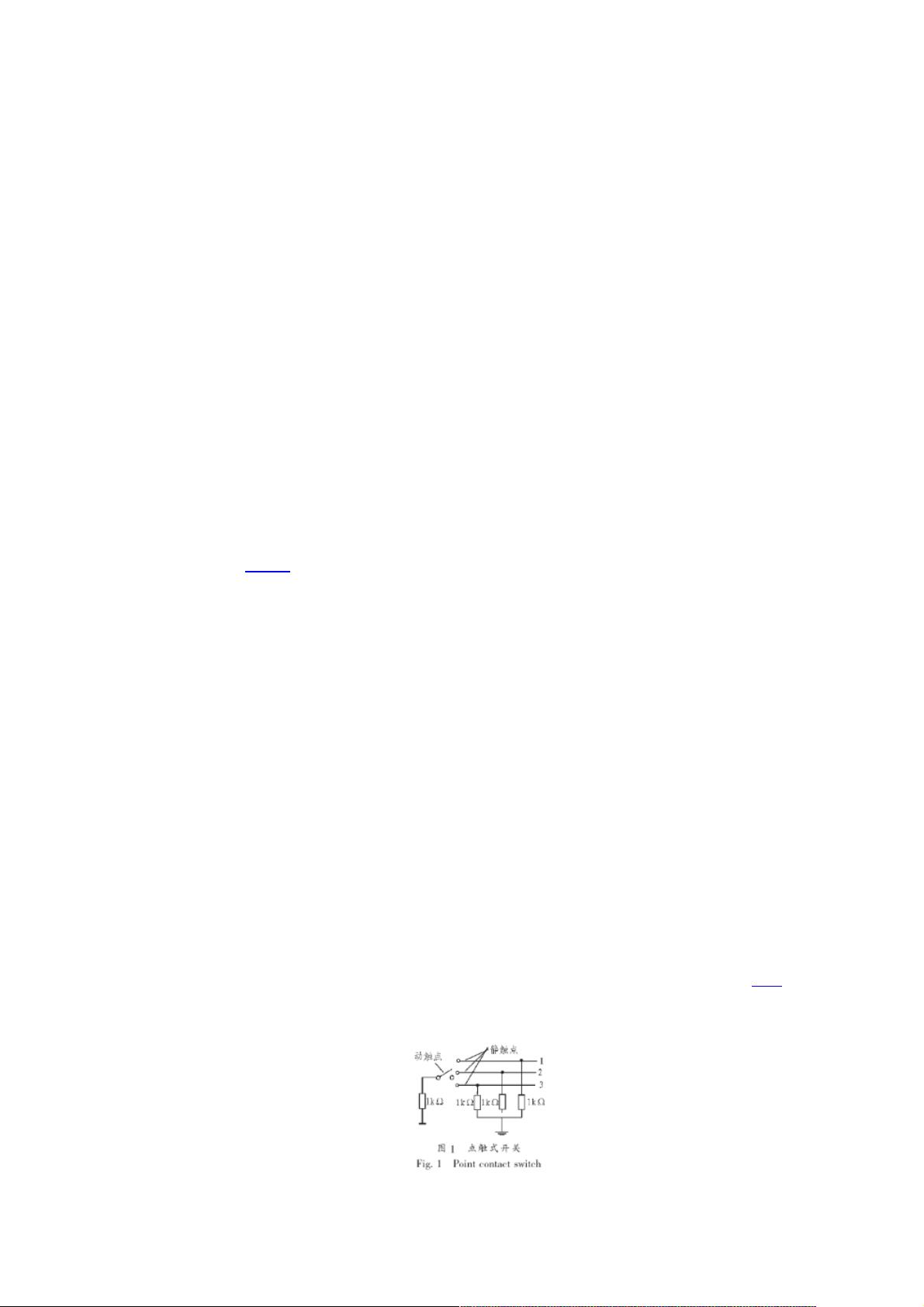
得到的安全行车距离不同,且速度越大,得出的安全行车距离差值就越大。因此决定安装一个路面情况选择开关,采用点触式
开关实现,由驾驶员根据天气状况主观选择附着系数,再进行数据处理,求出该附着系数下的安全行车距离。开关选择如图1
所示。
2、多普勒频移的测量
2.1 多普勒信息的提取
下载后可阅读完整内容,剩余3页未读,立即下载
2024-04-28 上传
2021-07-13 上传
2015-07-07 上传
2021-02-03 上传
2009-08-07 上传
2019-07-23 上传
2021-07-13 上传
2020-10-18 上传
2018-10-30 上传

weixin_38623009
- 粉丝: 5
- 资源: 906
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
