深入解析CAN总线协议及其在汽车网络中的应用
需积分: 5 11 浏览量
更新于2024-06-24
收藏 4.29MB PPTX 举报
CAN总线知识培训文档详细介绍了CAN(Controller Area Network,控制器局域网络)这一在汽车行业广泛应用的通信协议。CAN最初由德国博世公司在1986年为满足汽车领域对减少线束数量、高效传输大量数据的需求而开发。它通过ISO11898和ISO11519这两个国际标准得到了广泛的认可,并已成为欧洲汽车网络的标准协议。
CAN通信协议主要特点包括:
1. **多主控制**:所有节点在总线空闲时均可发送,高优先级ID的节点优先发送。
2. **短帧结构**:报文最多8字节,满足实时响应需求。
3. **优先级机制**:报文ID表示优先级,保证实时性。
4. **非破坏性仲裁**:错误处理能力强,失败则自动重发,确保可靠通信。
5. **CRC校验**:提供低错误率,保证数据传输可靠性。
6. **故障封闭**:能识别并隔离错误源头,提高网络稳定性。
7. **通信范围和速率**:支持远距离(10km,5Kbps以下)和高速(1MB/s,40m内),节点数可达110个。
8. **成本效益**:设计简单,双绞线作为媒介。
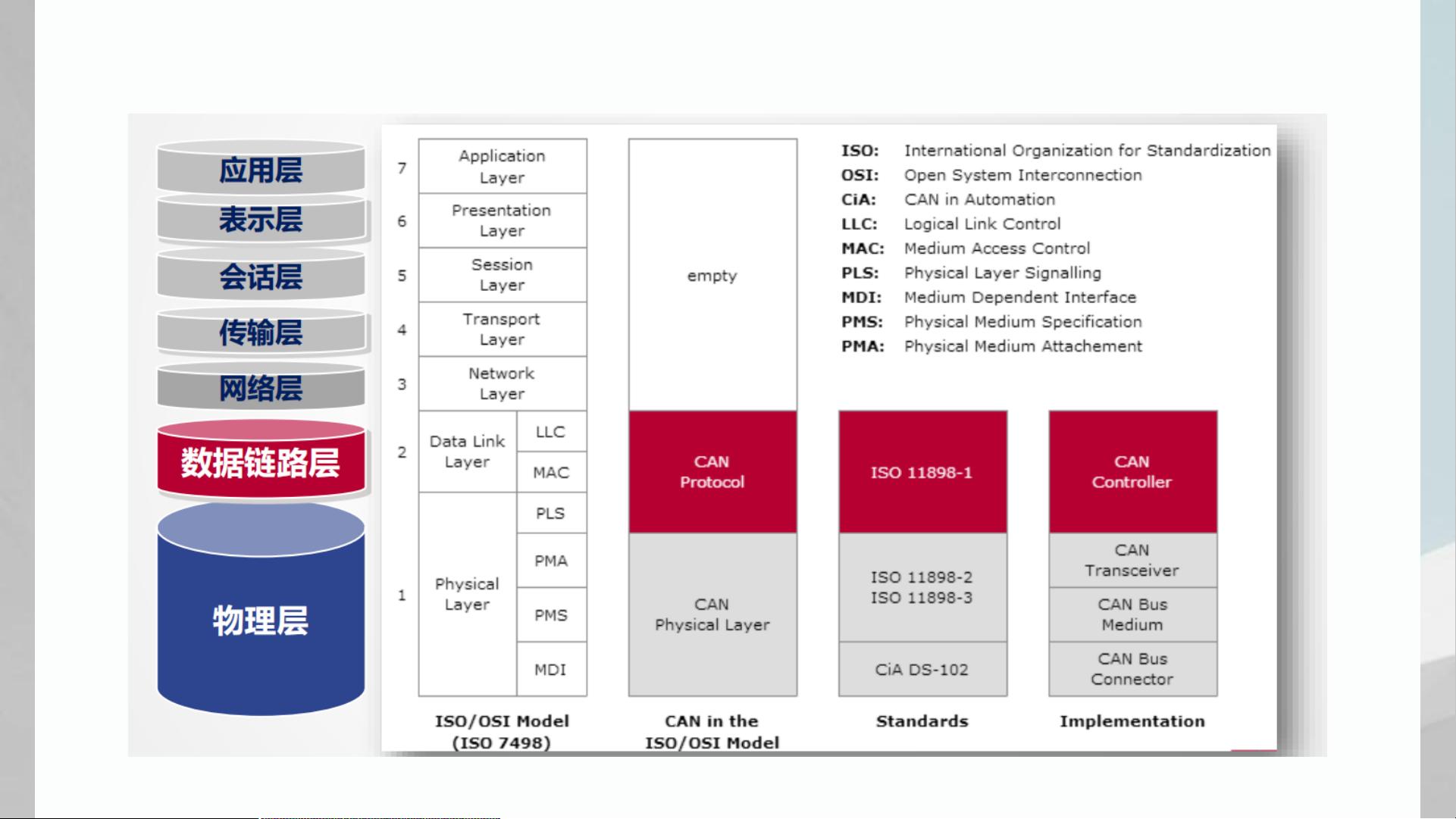
文档还提到了CAN与其他车载网络技术的比较,如CANFD(扩展数据速率)、LIN(Local Interconnect Network)、MOST(Media Oriented System Transport)、以及FlexRay,这些都用于满足汽车不同场景下的通信需求。此外,文档还强调了CAN与OSI(Open Systems Interconnection)模型的关系,指出ISO11898(高速CAN)和ISO11519-2(低速CAN)在物理层的不同之处。
在讲解CAN时,文档不仅涉及协议的基本概念,还深入讨论了帧结构(数据帧、遥控帧、错误帧等)、帧起始、仲裁段、控制段、数据段、CRC段和ACK段等组成部分,以及CAN如何适应汽车行业的特殊环境。这份培训资料为学习者提供了全面的CAN总线知识体系,有助于理解其在汽车电子系统中的重要作用。
5. 可靠的CRC校验方式,传输数据出错率极低,满足汽车数据传输的可靠性要求。
6.故障封闭,CAN 可以判断出错误的类型是总线上暂时的数据错误(如外部噪声等
)还是持续的数据错误(如单元内部故障、驱动器故障、断线等)。由此功能,当总
线上发生持续数据错误时,可将引起此故障的单元从总线上隔离出去。
7.通信距离最远达10km(速率5Kbps以下),通信速率最高1MB/s(此时距离最长
40m),节点数实际可达110个,
8.CAN节点设计成本较低,通信介质采用双绞线
CAN的特点
剩余38页未读,继续阅读
2020-07-29 上传
2021-05-25 上传
2021-05-22 上传
2023-04-19 上传
2021-05-22 上传
2021-05-23 上传

節奏
- 粉丝: 1
- 资源: 24
 我的内容管理
展开
我的内容管理
展开







