OpenDrive标准详解:静态与动态交通模拟的桥梁
版权申诉
OpenDrive虚拟地图标准是一种用于路网静态描述的存储格式,它与OpenCRG和OpenSCENARIO相结合,提供了静态和动态交通内容的全面描述,以支持场景驱动的交通模拟。OpenDRIVE的设计基于统一建模语言(UML),其1.6版本在保持向后兼容的同时,对1.5版中的某些元素进行了扩展和优化,允许用户通过<userData>自定义数据扩展每个元素,并通过<include>标签合并多个文件。
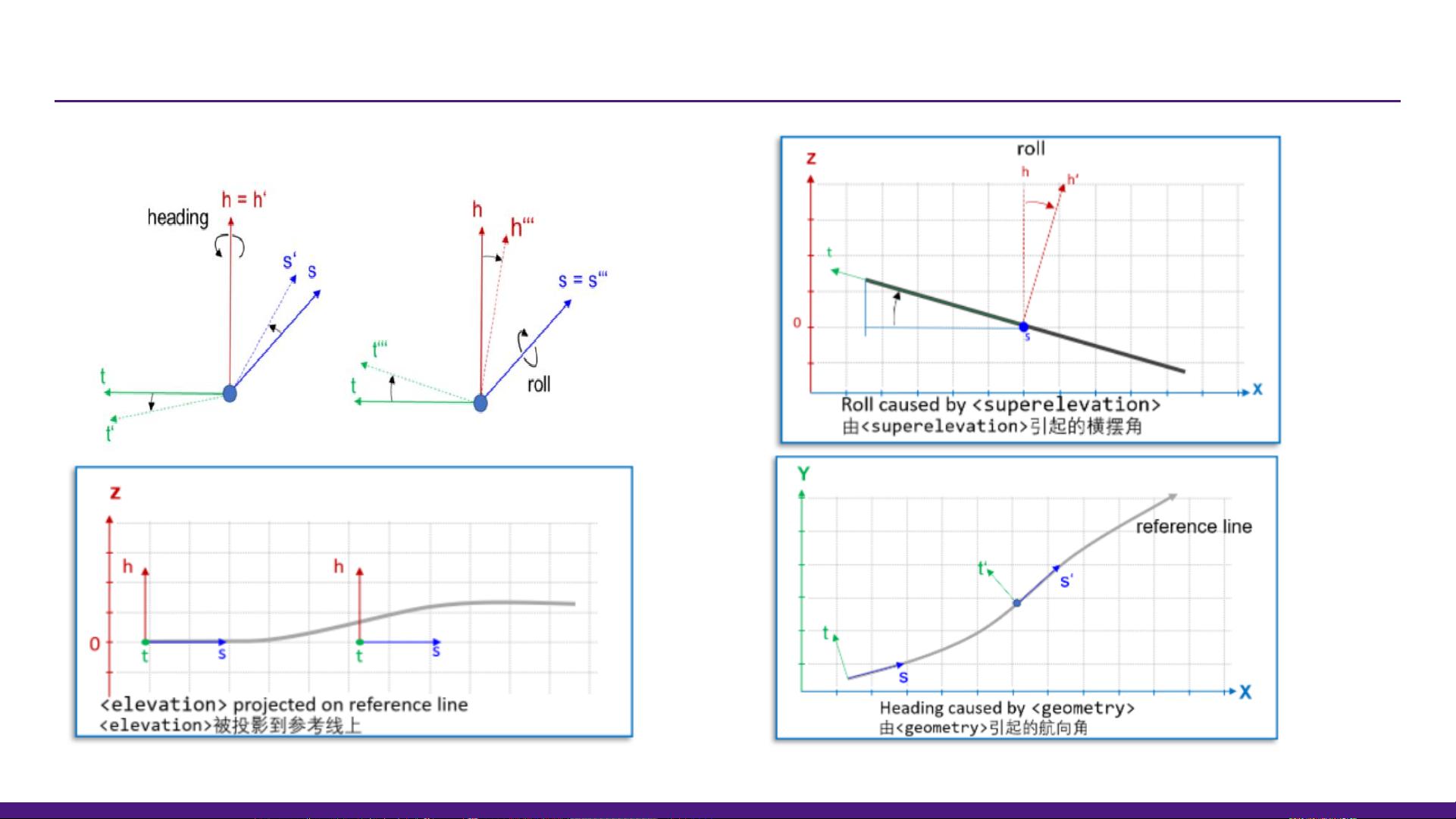
OpenDrive中的坐标系统至关重要,共分为三种类型:惯性坐标系、参考线坐标系和局部坐标系。惯性坐标系采用东、北、上三轴定义,通过航向角、俯仰角和横摆角调整元素的位置。参考线坐标系是道路参考线专用,s轴沿参考线切线方向,t轴与其正交,h轴垂直于x和y轴并指向上方。值得注意的是,俯仰角在参考线坐标系中并不适用,因为参考线的高程独立于s轴长度。
在实际应用中,OpenDrive可能会集成原始数据或外部资源,但这些数据的质量和准确性需在模型中明确表示。使用者应了解如何正确设置和转换坐标系,以便准确地定位和描述道路元素,这对于自动驾驶和交通模拟至关重要。
OpenDrive虚拟地图标准为交通规划、仿真和自动化系统提供了标准化的框架,通过理解并遵循其结构、坐标系统以及数据整合方式,开发者能够创建出更为真实和精确的交通场景模型。
2.坐标系
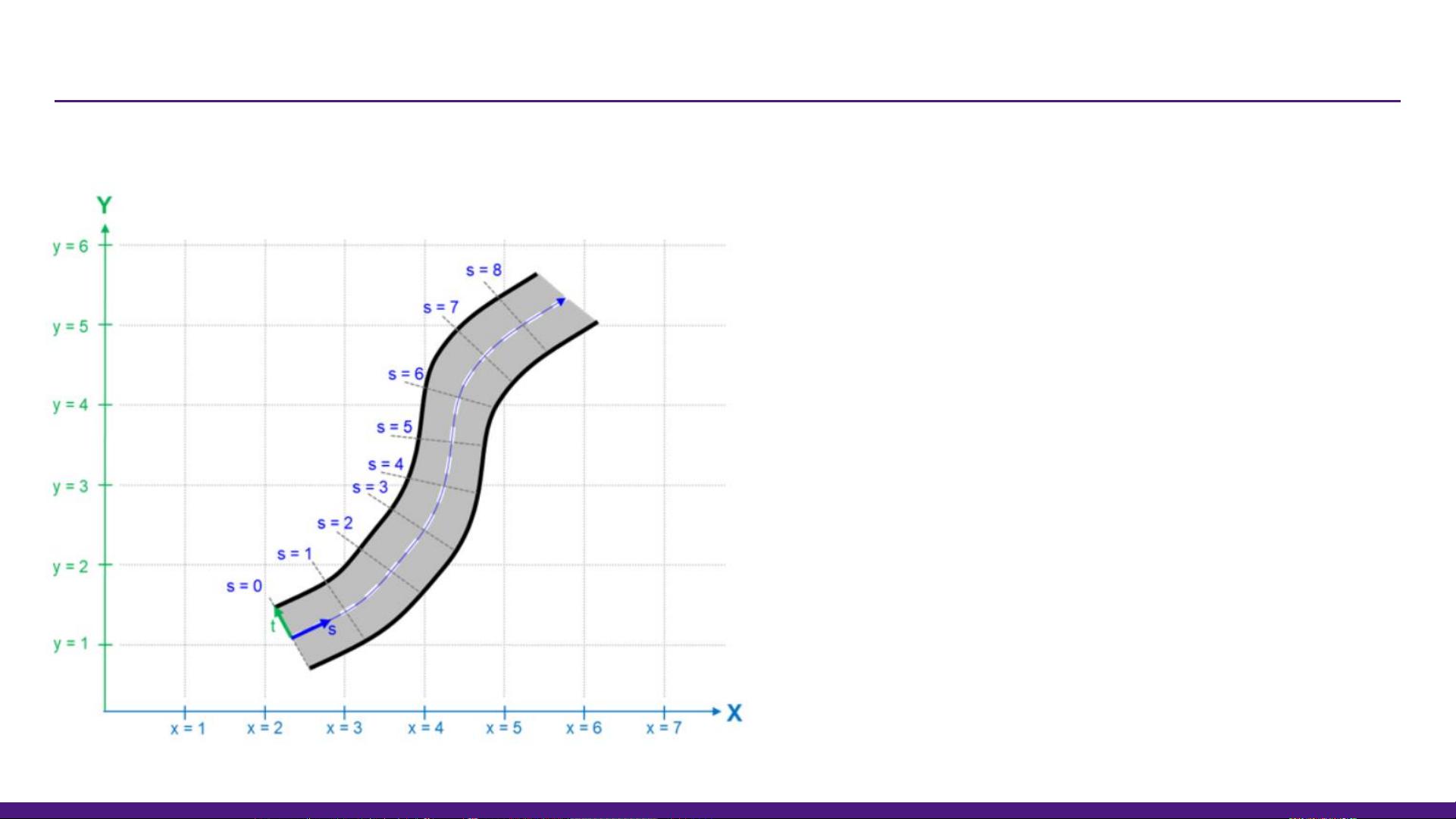
2.2参考坐标系
◆ 参考线坐标系同样也是右手坐标系,应用于
道路参考线。
◆ s方向跟随着参考线的切线方向。
◆ 参考线总是被放置在由惯性坐标系定义的x/y
平面里。
◆ t方向与s方向成正交。
◆ 在定义完垂直于x轴和y轴、朝上的h方向后,
整个右手坐标系才算完成。
剩余40页未读,继续阅读
2020-05-13 上传
2022-06-22 上传
2018-05-17 上传
2023-09-06 上传
2023-11-28 上传
2023-03-31 上传
2023-04-27 上传
2023-05-12 上传
2023-04-24 上传

小山哥_321
- 粉丝: 23
- 资源: 21
 我的内容管理
展开
我的内容管理
展开







最新资源
- 最优条件下三次B样条小波边缘检测算子研究
- 深入解析:wav文件格式结构
- JIRA系统配置指南:代理与SSL设置
- 入门必备:电阻电容识别全解析
- U盘制作启动盘:详细教程解决无光驱装系统难题
- Eclipse快捷键大全:提升开发效率的必备秘籍
- C++ Primer Plus中文版:深入学习C++编程必备
- Eclipse常用快捷键汇总与操作指南
- JavaScript作用域解析与面向对象基础
- 软通动力Java笔试题解析
- 自定义标签配置与使用指南
- Android Intent深度解析:组件通信与广播机制
- 增强MyEclipse代码提示功能设置教程
- x86下VMware环境中Openwrt编译与LuCI集成指南
- S3C2440A嵌入式终端电源管理系统设计探讨
- Intel DTCP-IP技术在数字家庭中的内容保护
