智能车竞赛逆透视变换:理论与Matlab实现
版权申诉
96 浏览量
更新于2024-08-03
收藏 873KB PDF 举报
智能车竞赛逆透视变换是一个关键的技术,它涉及到将摄像头捕获的图像转换回真实世界的三维空间,以便进行路径规划、障碍物识别等任务。这项技术在智能车比赛中具有重要作用,因为它可以帮助车辆理解其周围环境。
一、基本理论
在智能车中,摄像头拍摄的图片经过一系列变换,包括平移、旋转和缩放,才能映射到真实世界的坐标系统。其中,前三种变换是线性变换,可以逆向还原,因为它们保持了每个点的一一对应关系。然而,投影变换是投影映射,由于缺乏深度信息,如图所示,像点B和C在摄像头坐标系中落在同一位置,这就意味着逆变换时无法仅凭这些信息确定它们在世界坐标系中的精确位置。
智能车的特殊性在于,由于行驶面为水平,所有点的Z坐标都是0,这意味着尽管存在投影,但深度信息仍然存在,理论上可以通过逆透视变换恢复部分图像细节。比如,通过逆变换,一张在摄像头看来是矩形的照片可以变为倒梯形,而道路信息则呈现为俯视视角。
二、实现原理
为了实现逆透视变换,我们需要至少四个点在世界坐标系和摄像头坐标系中的坐标来构建一个方程组。这些坐标通常来自于摄像头捕捉的图像边缘或特征点。在编程实现中,使用二维像素坐标(x, y)和目标三维坐标(X, Y)作为输入,构建一个包含矩阵H的线性系统,该矩阵描述了从世界坐标到相机坐标的空间变换。
代码实现部分给出了使用Matlab的例子,通过给定四个关键点的坐标(A、B、D、C),矩阵A的构造包含了这些点在两个坐标系中的关系,然后通过求解这个线性方程组来计算逆变换所需的矩阵H和Hd。
三、代码实现示例
在提供的代码片段中,首先定义了四个点的像素坐标和目标坐标,然后创建了矩阵A,包含了相应的变换系数。接着,通过求解这个方程组,可以获得H和Hd,这两个矩阵是执行逆透视变换的关键。实际应用时,需要注意像素坐标的方向(纵坐标x对应Y轴,横坐标y对应X轴)以及坐标值的起始位置。
智能车竞赛中的逆透视变换是一个基础但关键的技术,通过解决深度信息问题,它帮助车辆理解和重构周围环境,从而实现更精准的导航和决策。理解和掌握这个概念及其编程实现对于参加智能车竞赛的队伍来说至关重要。
智能车竞赛逆透视变换(含编程实现)
一、基本理论
在谈逆透视变换之前,我们先谈一下真实世界和智能车上安装的摄像头所获取的照片的关系。世界
坐标系下的点要经历平移变换、旋转变换、缩放变换、投影变换而得到摄像头坐标系下的点。前三
种变换都是一一映射的变换,即原坐标下的点唯一对应新坐标下的点。只要知道规则,逆变换就可
以完成。
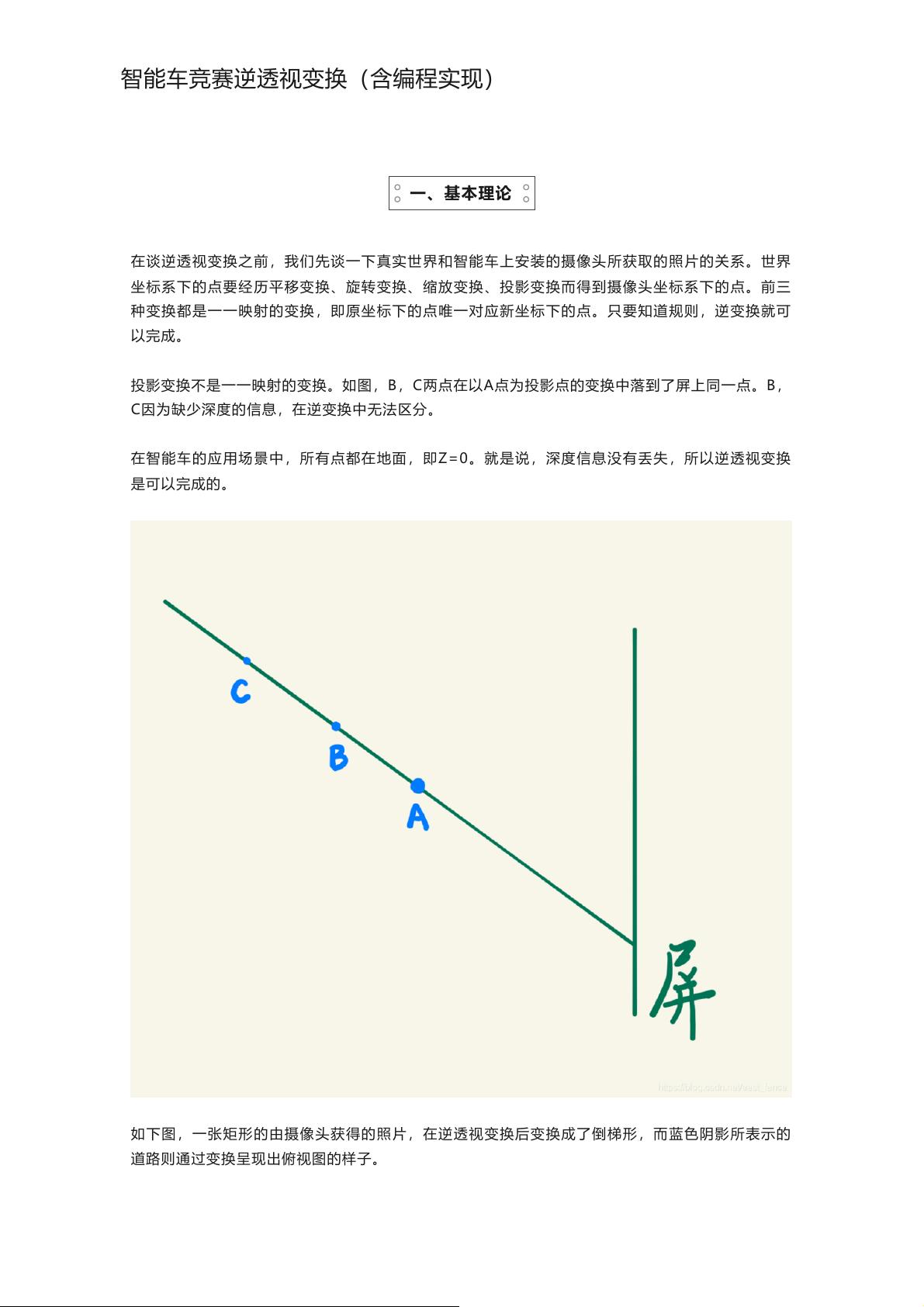
投影变换不是一一映射的变换。如图,B,C两点在以A点为投影点的变换中落到了屏上同一点。B,
C因为缺少深度的信息,在逆变换中无法区分。
在智能车的应用场景中,所有点都在地面,即Z=0。就是说,深度信息没有丢失,所以逆透视变换
是可以完成的。
如下图,一张矩形的由摄像头获得的照片,在逆透视变换后变换成了倒梯形,而蓝色阴影所表示的
道路则通过变换呈现出俯视图的样子。
下载后可阅读完整内容,剩余6页未读,立即下载
2020-04-17 上传
707 浏览量
1648 浏览量
1789 浏览量
987 浏览量
835 浏览量

阿拉伯梳子
- 粉丝: 2415
- 资源: 5734
 我的内容管理
展开
我的内容管理
展开







最新资源
- Haskell编写的C-Minus编译器针对TM架构实现
- 水电模拟工具HydroElectric开发使用Matlab
- Vue与antd结合的后台管理系统分模块打包技术解析
- 微信小游戏开发新框架:SFramework_LayaAir
- AFO算法与GA/PSO在多式联运路径优化中的应用研究
- MapleLeaflet:Ruby中构建Leaflet.js地图的简易工具
- FontForge安装包下载指南
- 个人博客系统开发:设计、安全与管理功能解析
- SmartWiki-AmazeUI风格:自定义Markdown Wiki系统
- USB虚拟串口驱动助力刻字机高效运行
- 加拿大早期种子投资通用条款清单详解
- SSM与Layui结合的汽车租赁系统
- 探索混沌与精英引导结合的鲸鱼优化算法
- Scala教程详解:代码实例与实践操作指南
- Rails 4.0+ 资产管道集成 Handlebars.js 实例解析
- Python实现Spark计算矩阵向量的余弦相似度
