PID控制算法详解与C语言实现
需积分: 19 128 浏览量
更新于2024-09-14
收藏 534KB PDF 举报
"PID算法原理与应用"
PID(比例-积分-微分)算法是一种广泛应用的自动控制算法,它通过结合比例、积分和微分三个控制作用来实现对系统的精确控制。该算法的主要目的是减小系统误差,使得受控对象能够快速、稳定地达到设定值。
1、PID控制原理
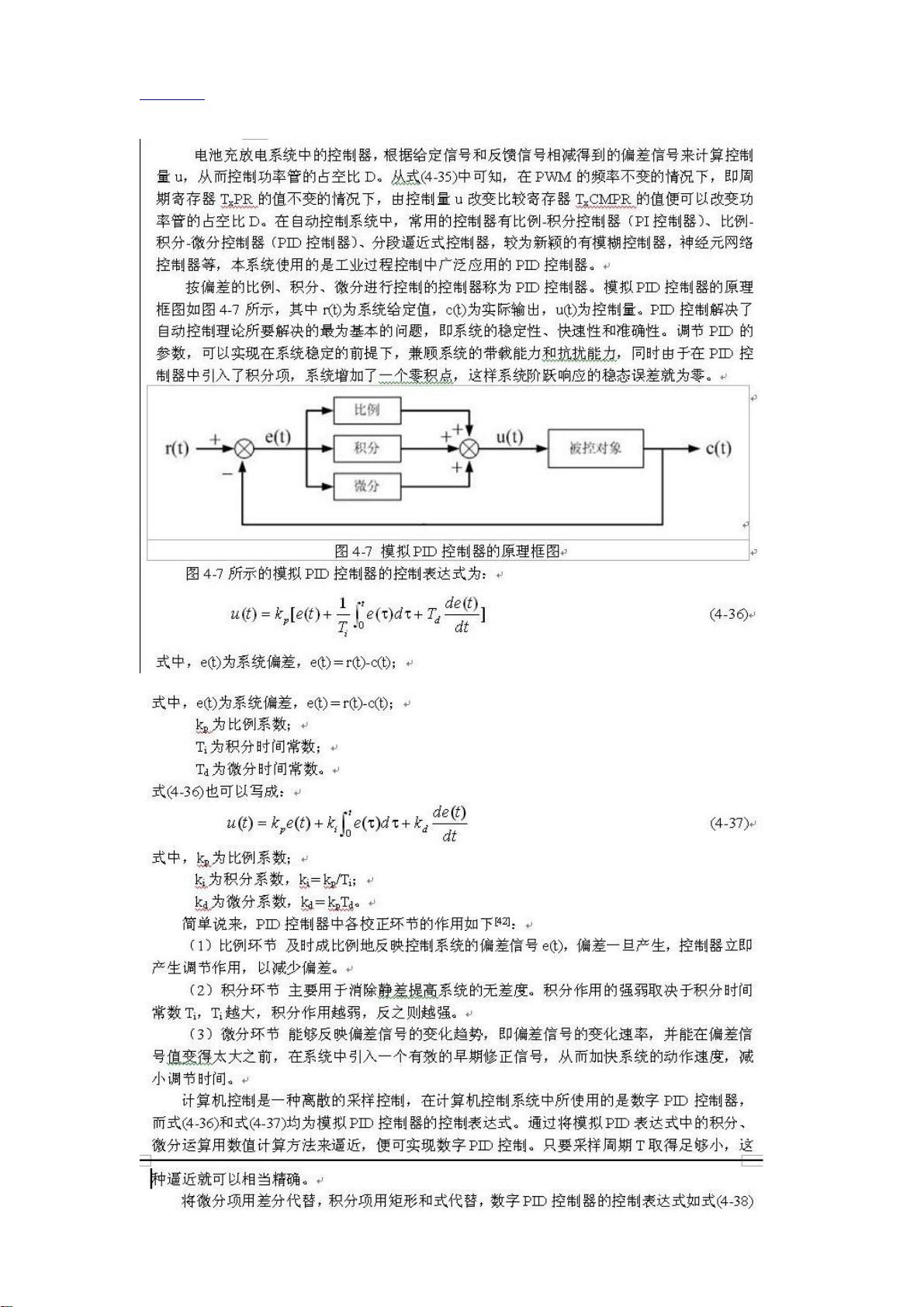
PID控制器的输出是输入误差(当前值与目标值之间的差异)的函数。比例(P)部分立即响应误差,积分(I)部分考虑了过去的累积误差,而微分(D)部分则预测未来误差的变化趋势。这三个部分的组合可以根据系统的特性进行调整,以实现最佳控制效果。
- 比例(P)项:直接反映当前误差的大小,比例常数Kp越大,控制响应越快,但可能会导致振荡。
- 积分(I)项:负责消除静态误差,通过积累过去一段时间内的误差来调整控制信号。积分时间常数Ti决定了积分作用的强弱,小的Ti可以更快消除误差,但可能导致振荡。
- 微分(D)项:有助于提前预测并减少误差变化,提高系统的稳定性。微分时间常数Td决定了微分作用的强度,较大的Td可以提前抑制系统的超调。
2、PID流程图
PID控制通常表现为一个反馈回路,包括采样、误差计算、比例、积分和微分计算以及控制输出更新等步骤。流程图中,会展示如何根据误差ek、ek1、ek2计算出控制增量uk,并通过积分和微分环节调整uk,最终确定调节器输出adjust。
3、PID代码实现
在提供的代码片段中,可以看到PID算法的C语言实现。其中,Kp、Ti和T分别为比例常数、积分时间和采样周期,Ki、ek、ek1和ek2用于积分和偏差计算,uk和uk1用于控制增量的计算和整定,adjust为实际的调节器输出。`piadjust()`函数实现了基本的PI算法,根据误差ek和ek1计算uk,并进行四舍五入处理,防止控制信号的突变。在AD中断程序中,这一函数被用来不断更新EvaRegs.CMPR3,即PWM占空比,以实现PID控制。
4、PID调节经验总结
参数选择是PID控制的关键,常见的方法有试凑法、临界比例度法、扩充临界比例度法等。实际应用中,通常需要经过反复试验来确定合适的参数,确保系统的稳定性和快速响应。一个通用的步骤包括:
- (1)初选参数:先设定大致的比例Kp,通过观察系统的动态响应进行初步调整。
- (2)积分作用:增加积分作用以消除静差,注意防止系统振荡。
- (3)微分作用:引入微分作用来改善瞬态响应,降低超调和振荡。
- (4)反复调试:根据系统性能指标,不断调整Kp、Ki和Kd,直至达到满意效果。
PID算法是控制理论中的基础工具,其原理和实现方式都相对直观,但在实际应用中需要根据具体系统特性进行细致的参数调整,以达到最佳的控制性能。
PID 算法原理、调试经验以及代码
学习总结
2010-09-26 22:40:27 阅读 0 评论 0 字号:大中小 订阅
1、PID 控制原理
下载后可阅读完整内容,剩余5页未读,立即下载
2021-10-04 上传
5639 浏览量
106 浏览量
135 浏览量
247 浏览量
180 浏览量
200 浏览量
2024-04-15 上传

学弟一号
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- R2-D2:Discord自己的星际机器人
- 龙支付运营级支付网站源码.zip
- TagIt-crx插件
- plus7-tools:从Plus7检索数据的工具集合。 仅用于教育
- set-terminal-title:为您的 Node.js 进程设置终端标题
- 360浏览器插件打开rtsp视频流.zip
- Coursera_capstone
- cinemofruitshop
- 宿舍管理信息系统.rar
- 绿色英语教育基地网页模板
- IRChat:Cuberite 的 IRC 桥
- OpenModem:强大的AFSK调制解调器平台
- projekt
- 数字信息服务中心网页模板
- MFC类库中文手册.zip
- rob534_SDM_hw2_optimization_dl_inforative_path_planning:机器人作业中的顺序决策
