Arduino单片机控制的智能避障小车设计
版权申诉
14 浏览量
更新于2024-06-16
收藏 3.7MB DOC 举报
"这篇文档是关于XX职业技术学院的一份毕业设计,主题是基于Arduino单片机的智能小车设计,旨在实现自动避障和智能路径规划功能。"
在这篇毕业设计中,作者深入探讨了智能小车的设计与实现,特别强调了在家庭环境中应用的可能性。智能小车作为一个综合系统,融合了环境感知、决策规划和辅助驾驶等多种功能,对智能交通系统具有重要意义,并在军事、民用和太空探索等多个领域有广阔的应用前景。
在硬件设计部分,该系统以Arduino单片机为核心控制器,利用超声波传感器来检测前方障碍物,实现自动避障功能。软件设计上,采用C语言编程,通过编程控制小车运行,适应不同家居环境下的路径选择,以提升智能清扫小车的实用性与人性化。
论文详细分析了小车的各个组成部分,包括:
第二章中,作者对比和选择了主控单元和避障单元的方案,讨论了小车所需的基本信息。
第三章主要讨论了小车的“触觉”和“眼睛”,即内部检测原理,包括电机的电流和电压检测,以及超声波测距技术。
第四章介绍了小车的移动机制,详细阐述了轮系结构,直流电机H桥驱动电路,以及电机控制信号。
第五章聚焦于小车的“大脑”——Arduino单片机,简述了其基本特性、引脚功能,以及Arduino编程软件的使用。
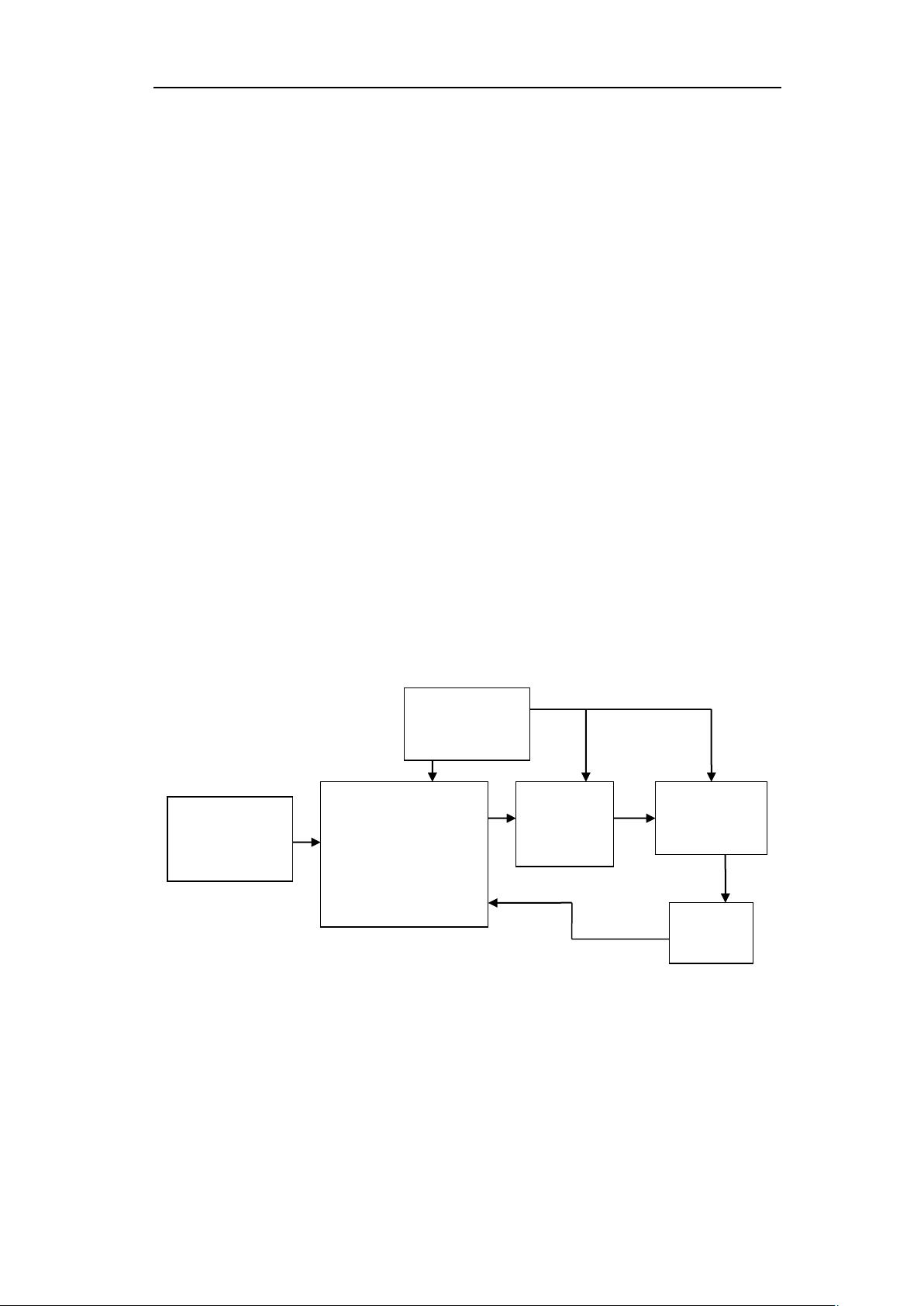
第六章则详细解析了智能小车的控制流程和程序设计,包括控制流程的概述。
这篇毕业设计不仅涵盖了硬件构建,还涉及软件开发,全面展示了智能小车的开发过程。设计目标明确,旨在通过智能技术提升小车的自主导航和避障能力,以满足实际应用场景的需求。这样的设计对于理解单片机控制系统,尤其是Arduino平台在智能设备中的应用具有很高的学习价值。
江海职业技术学院学位论文
第 4 页
两台 PC486 完成路边抽取识别和激光信息处理,8098 单片机完成定位计算和车
辆自动驾驶。其体系结构以水平式结构为主,采用传统的“感知-建模-规划-执
行”算法,其直线跟踪速度达到 20km/h,避障速度达到 5-10km/h。
智能车辆研究也是智能交通系统 ITS 的关键技术。目前,国内的许多高校和
科研院所都在进行 ITS 关键技术、设备的研究。随着 ITS 研究的兴起,我国已形
成一支 ITS 技术研究开发的技术专业队伍。并且各交通、汽车企业越来越加大了
对 ITS 及智能车辆技术研发的投入,整个社会的关注程度在不断提高。交通部已
将 ITS 研究列入“十五”科技发展计划和 2010 年长期规划。相信经过相关领域
的共同努力,我国 ITS 及智能车辆的技术水平一定会得到很大提高。
可以预计,我国飞速发展的经济实力将为智能车辆的研究提供一个更加广阔
的前景。我们要结合我国国情,在某一方面或某些方面,对智能车进行深入细致
的研究,为它今后的发展及实际应用打下坚实的基础。
1.3 课题主要内容
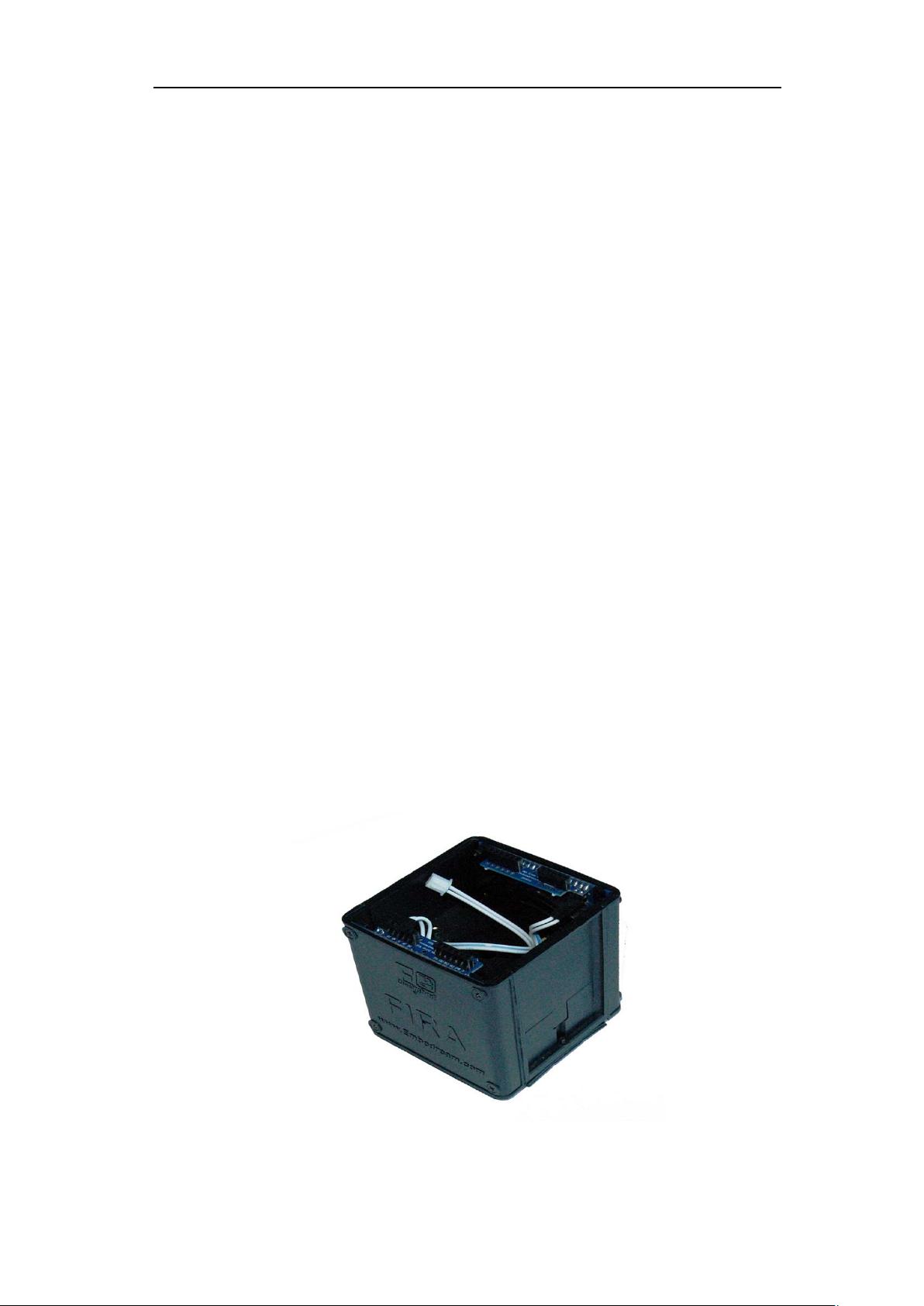
本课题南京嵌入之梦工作室的 fira 智能小车平台,选择通用、价廉的
Arduino 单片机为控制平台,通过细化设计要求,结合传感器技术和电机控制技
术相关知识实现小车的各种功能。设计完成以由超声波测距、自动避障组成的硬
件模块结合软件设计组成多功能智能小车,共同实现小车的前进倒退、转向行驶,
自动根据超声波检测前方障碍物距离,进行导航,检测障碍物后停止等功能,实
现智能控制,达到设计目标。
图 1.1 小车外形图
剩余39页未读,继续阅读
177 浏览量
242 浏览量
284 浏览量
219 浏览量
104 浏览量
181 浏览量
2023-07-10 上传
105 浏览量

xiaoli8748_软件开发
- 粉丝: 1w+
- 资源: 1435
 我的内容管理
展开
我的内容管理
展开







最新资源
- pg_cron:在PostgreSQL中运行定期作业
- Simple Shooting Game using JavaScript with Free Source Code.zip
- Project SoFi-开源
- LopiPusherBundle:捆绑使用Pusher App
- 西门子WinCC_flexible 电子学习解决方案.rar
- skrubbed.github.io:egs d
- DS-UWB.rar_DS-UWB_宽带信号_超宽带_超宽带信号
- jspm驾校学员管理系统毕业设计程序
- JS6.Booleansen[removed]JS 6。 布尔值JavaScript
- Simple Product Inventory System using
- NuQLeus:通过解析器级别的性能指标和错误跟踪来增强GraphQL端点测试功能
- GNSS_SDR_a.zip_GNSS_GNSS_SDR_a_伪卫星_北斗跟踪
- 高斯白噪声matlab代码-PARCS:使用成对的自适应回归累加器(PARCS)检测多个变化点
- Optimierung-开源
- UCGUI学习资料.rar
- css-essentials-css-issue-bot-9000-den01-seng-ft-062220
