打孔机影像定位系统设计与坐标变换解析
165 浏览量
更新于2024-09-04
收藏 107KB PDF 举报
"打孔机影像定位系统设计"是一个涉及到计算机视觉和自动化控制技术的工程应用。系统的主要目的是通过影像处理技术实现对打孔位置的精准定位,从而提高打孔机的工作效率和精度。
计算机视觉在该系统中扮演了核心角色,它主要负责定位任务。根据描述,定位主要包括坐标位移和旋转两个关键步骤。坐标位移通过简单的数学公式计算出目标位置相对于原点的平移距离,而坐标旋转则需要将直角坐标转换为极坐标,然后计算旋转后的极坐标再转回直角坐标。当同时存在位移和旋转时,应先执行位移运算,再进行旋转。
系统采用了Euresys公司的eVision EasyMatch函数库,这是一个基于灰度相关性的图像匹配工具,能快速并精确地进行亚像素级别的匹配,适应各种变换,如缩放、旋转和平移。这使得即使在复杂环境中,系统也能准确找到模板图像的位置。
系统的硬件架构包括GEME-3000主控制器,它内置HSL控制卡,运行Windows XP操作系统,提供计算和控制能力。3-Axis定位平台由三菱伺服马达和滚珠螺杆组成,用于精确的三轴运动。运动控制器HSL-4XMO协调这些动作,确保定位的准确性。计算机视觉组件通过IEEE1394接口的CCD摄像头捕捉图像,并借助Euresys eVision软件进行处理。
在实际操作中,系统校正是必不可少的环节。例如,Mitsubishi驱动器的调校确保了运动控制的精度,设置为10000pulse/roll的分辨率,提高了定位的精细度。
"打孔机影像定位系统设计"是一个融合了高级图像处理技术、精密运动控制和硬件集成的复杂系统,旨在实现高精度的自动化打孔作业。这个系统不仅提高了生产效率,还减少了人工操作可能带来的误差,对于电子竞赛或控制类项目具有重要的参考价值。
打孔机影像定位系统设计打孔机影像定位系统设计
打孔机影像定位系统设计
前言前言
计算机视觉的应用大致上可以分成定位、量测、识别、缺陷检测四大类,其中以定位的应用最为广泛。机器视觉系统可以用来
检视主机板上的电子组件,也可以用来控制机械手臂,在机械手臂上加装CCD,利用影像辨识的定位,带动机械手臂来做病
毒研究、药物混合等一些高危险性的医疗研究。除了精准之外,对人类的生命也比较有安全保障。
影像定位后的坐标转换影像定位后的坐标转换
市面上影像比对的函数库(Library)很多,使用者可以自行选用合适的函数库。以下所提的系统采用Euresys公司开发的eVision
EasyMatch,这是一种基于灰度相关性的图像匹配函数库,速度非常快,而且能够达到次像素(sub-pixel)精度的匹配结果。对
于旋转、比率变化(缩/放)和平移等,都能精确找到模板图像(Golden Image)的位置。故本文仅对影像定位后的二维坐标产生
的“位移”与“旋转”做探讨。
● 坐标位移
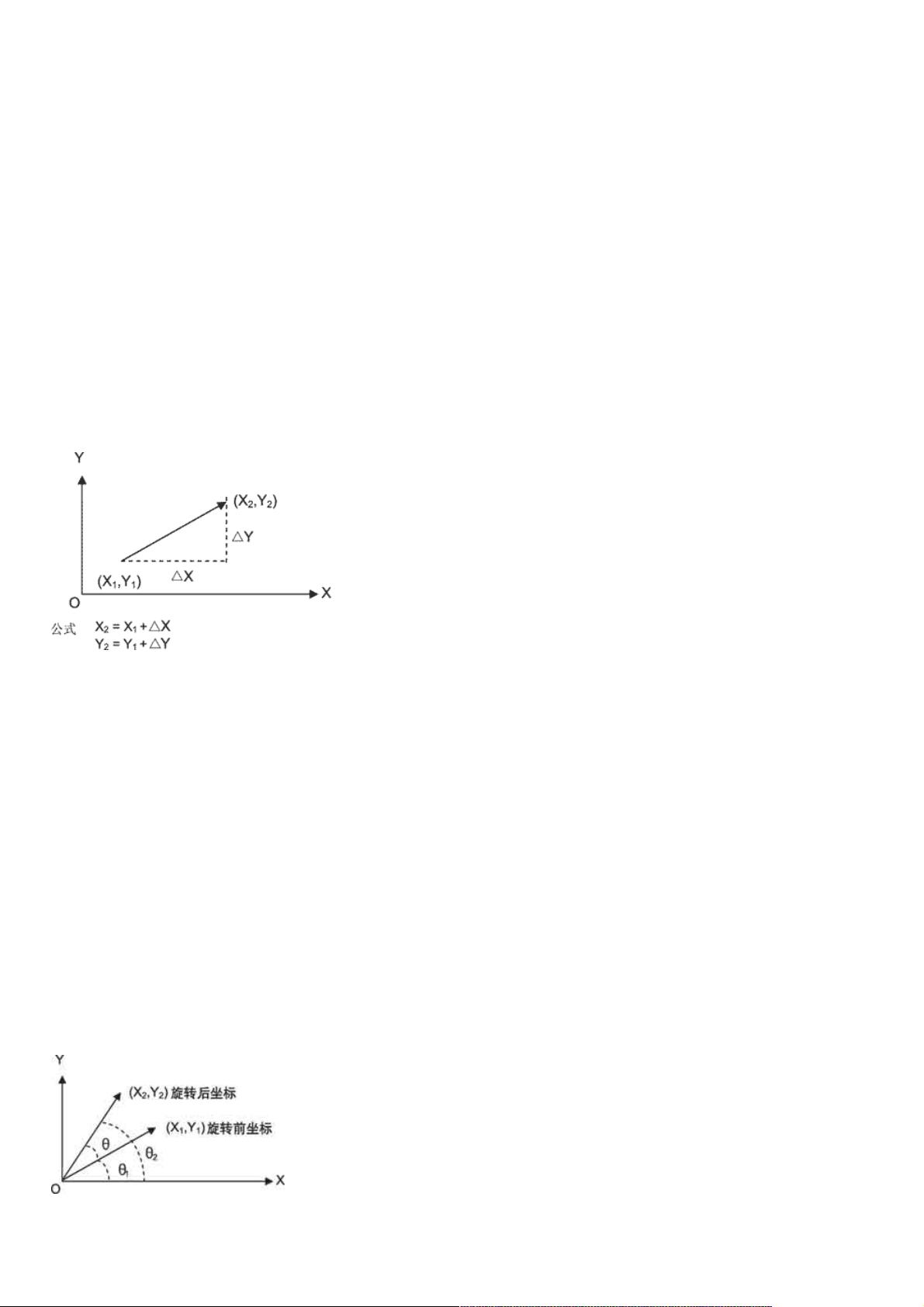
公式:X2= X1+ ΔX
Y2= Y1+ ΔY
图图1 坐标位移示意图坐标位移示意图
图1是坐标位移的示意图。
● 坐标旋转
(1)将(X1,Y1)转换成极坐标→ (X1,Y1) = (R1,θ1)
其中,R1= √X12+ Y12
θ1= arctan( Y1/ X1),即反正切函数
(2)θ2= θ1+ θ,其中,θ= 表示旋转角度
得出 X2= Cos (θ2) * R1
= Cos (arctan(Y1/X1)+θ) *
√X12+ Y12
Y2= Sin(θ2) * R1
= Sin(arctan(Y1/X1)+θ) * √X12+ Y12
图图2 坐标旋转的示意图坐标旋转的示意图
图2是坐标旋转的示意图。
下载后可阅读完整内容,剩余3页未读,立即下载
2021-09-28 上传
2023-06-03 上传
2024-09-11 上传
2023-05-11 上传
2023-03-30 上传
2023-04-26 上传
2024-02-17 上传
2023-10-16 上传

weixin_38737366
- 粉丝: 5
- 资源: 950
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
