STM32 CAN数据帧发送与过滤器配置详解
本文主要介绍了STM32 CAN滤波器配置的详细过程,针对嵌入式硬件环境下的CAN总线通信技术进行深入解析。CAN(Controller Area Network)是一种工业标准通信协议,常用于汽车电子系统、工业自动化等领域,因其抗干扰性强、数据传输效率高而被广泛应用。
在STM32平台中,发送和接收数据时,需要对数据帧和远程帧进行控制,因为这些帧类型是可以通过软件编程实现的。数据帧分为标准数据帧和扩展数据帧,标准帧标识符ID为11位,扩展帧为29位,区分它们的关键在于IDE字段的设置。在发送数据时,开发者需要通过CanTxMsg结构体来构建CAN帧,该结构包括:
1. **StdId/ExtId**:分别用于设定标准和扩展标识符,范围分别为0x0000-0x7FF(标准)和0x00000000-0x1FFFFFFF(扩展)。
2. **IDE**:标识符的类型字段,用于指示是标准帧还是扩展帧。
3. **RTR**:远程请求标志,决定帧类型,可设置为数据帧或远程帧。
4. **DLC**:数据长度计数器,表示数据域的长度,范围0-8,用于确定后续Data[]数组的长度。
5. **Data[8]**:实际要发送的数据,每个元素0-255,最大可容纳8个字节。
发送时,创建CanTxMsg对象并填充所需字段,其余部分由硬件自动处理。重要的是,开发者需要根据应用场景和需求设置正确的标识符类型、帧类型和数据长度。此外,文章还提到了CAN过滤器配置的概念,虽然这部分内容在提供的部分并未详述,但通常在STM32中,通过配置CAN控制器的过滤器可以设置接收哪些特定的标识符,或者根据某些条件来过滤接收到的数据,以提高数据处理的精确性和效率。
理解STM32 CAN发送和接收过滤原理,以及如何正确配置CanTxMsg结构体,是嵌入式开发人员在使用STM32进行CAN通信时不可或缺的基础技能。通过本文,读者将能够掌握如何在STM32平台上高效、精确地进行CAN数据帧的构建和筛选,从而实现高效稳定的通信。
STM32 CAN 发送和接收过滤原理
通过对 CANBUS 协议的理解,我们知道:CAN 总线上的节点接收或发送数据都是以帧为单
位的!!!CAN
协议规定了好几种帧类型,但是对于我们应用来说,只有数据帧和远程帧可
以通过软件编程来控制。(其他几种帧都是由 CAN 控制器硬件实现的,我们想管也管不了)
。
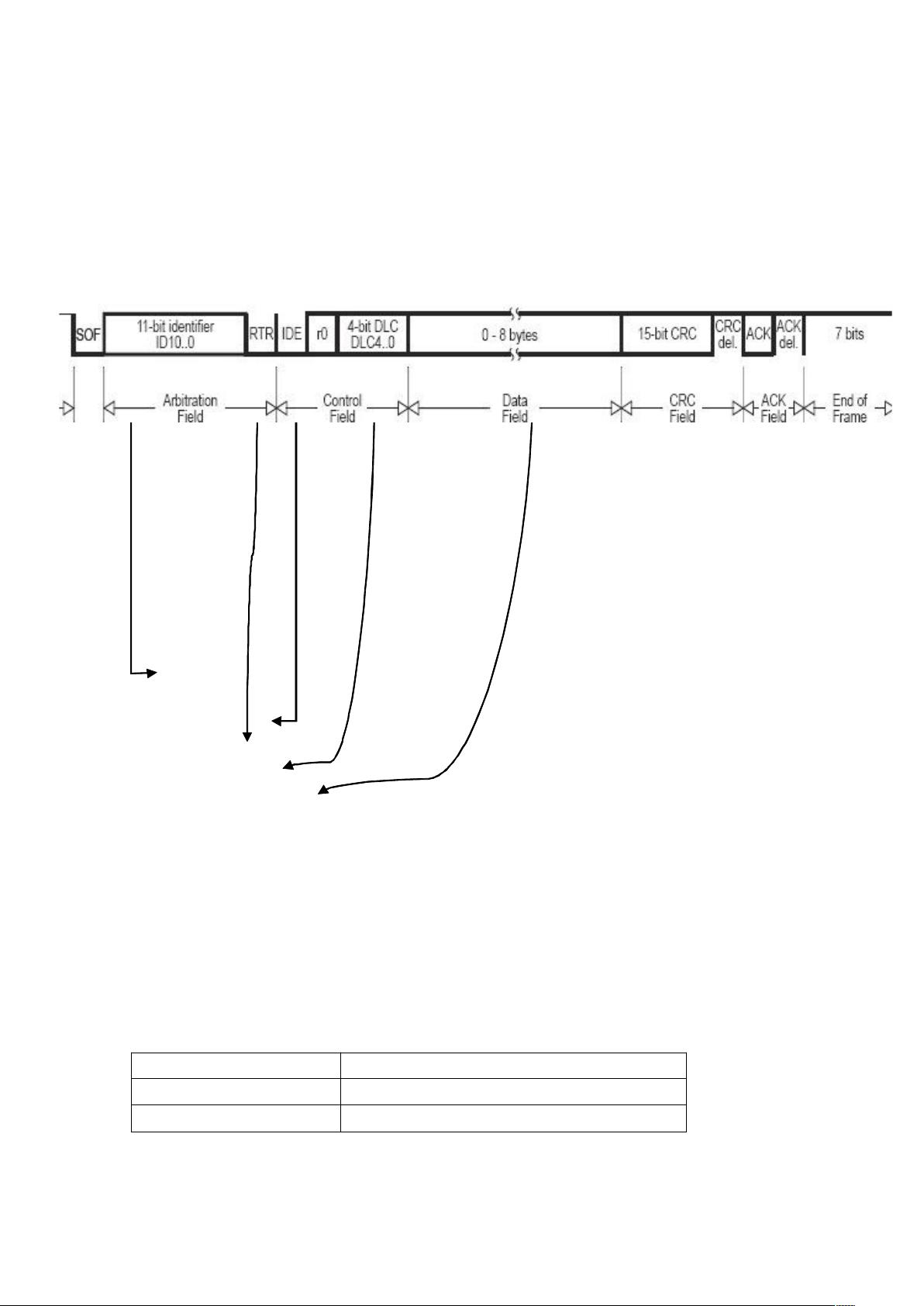
而数据帧和远程帧最大的区别在于:远程帧没有数据域。数据帧分为标准数据帧和扩展数据
帧,
它们之间最大的区别在于:标识符(ID)长度不同(标准帧为 11 位,扩展帧为 29 位)。为了
能更好地理解下面的内容,让我们先来回忆一下标准数据帧是什么样子的:
我们首先来看发送:
前面已经强调了 CAN 总线上的节点接收或者发送数据都是以帧为单位。假如我们要发送一个字节的
数据:0x5A,是不是像串口发送数据那样,直接把 0x5A 写入发送缓冲寄存器,然后发送就可以了呢?
NO!刚才已经强调了,CAN
总线上的数据都是以帧为单位的!!!我们必须按照帧的格式填充它!TNND
,
这
么复杂?没关系,ST 库函数已经提供了一个结构,我们只需要填充该结构就可以了。我们来看一下
这个
结构的样子:
typedef struct
{
uint32_t
uint32_t
StdId; //标准帧 ID,如果您要发送扩展帧。可以不管它
ExtId; //扩展帧 ID,如果您要发送标准帧。可以不管它
uint8_t IDE;
uint8_t RTR;
uint8_t DLC;
//您是想发送标准帧还是扩展帧?
//您是想发送数据帧还是远程帧?
// 您想发送数据的长度。
uint8_t Data[8]; //您想要发送的数据。
} CanTxMsg;
StdId
StdId 用来设定标准标识符。它的取值范围为 0 到 0x7FF。
ExtId
ExtId 用来设定扩展标识符。它的取值范围为 0 到 0x1FFFFFFF。
IDE
IDE 用来设定消息标识符的类型。
IDE 值
IDE
描述
CAN_Id_Standard
使用标准标识符
CAN_Id_Extended
使用扩展标识符
下载后可阅读完整内容,剩余3页未读,立即下载
811 浏览量
496 浏览量
155 浏览量
159 浏览量
114 浏览量
475 浏览量
579 浏览量

weixin_362360865
- 粉丝: 16
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- FLASH四宝贝之-使用ActionScript.3.0组件
- 《j2ee开发全程实录+》.pdf
- 精通 JavaScript.pdf
- 矩阵理论+Matrix+Theory
- JSP2_0技术手册.pdf
- 图书馆读者网络服务系统的架构与实现
- 振荡器模拟知识20090406
- 推荐Java 学习资料——Java技能百练.pdf
- 深入浅出Struts2.pdf
- Hibernate开发指南.pdf
- 代理中Domino对域的解析和GetItemValue使用方法
- EJB3.pdf EJB3.pdf
- VHDL电路设计例代码集.doc
- photoshop快捷键
- 俄罗斯方块VC++课程设计
- modelsim学习资源包
