六自由度轮胎装配机器人结构设计与关键技术
版权申诉
62 浏览量
更新于2024-06-23
收藏 1.11MB DOC 举报
随着全球汽车制造业的快速发展,自动化装配已成为提升生产效率和降低成本的关键因素。轮胎装配机器人作为其中的重要组成部分,以其独特的优势在汽车制造流水线中扮演着核心角色。装配机器人主要负责零件的精确装入、压入、铆接、嵌入、喷涂和拧紧螺钉等精细作业,同时还能执行输送、搬运、检测和安置等辅助任务,显著提高了装配的精度和速度。
本文研究的核心是结构设计,特别关注的是采用仿人手臂的关节型机器人。这种机器人因其结构紧凑、占用空间小、运动范围大、动作灵活且定位准确,成为理想的轮胎装配工具。设计过程包括以下几个关键步骤:
1. 功能需求分析:根据轮胎装配机器人的具体功能需求,通过与其他机器人设计方案的比较,确定最能满足高效、精准装配要求的解决方案。
2. 设计参数设定:确定机器人的运动范围和负载能力,这涉及到关节的运动机构设计,包括关节的角度范围和扭矩要求。
3. 传动系统设计:选择适合的轴承和安装方式,以确保关节间的平稳运转。通过对比不同电机的特点,例如扭矩、速度和功率,来决定最适合的动力源。
4. 结构建模与仿真:利用三维建模软件CATIA进行模拟分析,优化结构布局,确保各部分间无干涉,并进行必要的参数调整。
5. 齿轮传动设计:根据所需传动比和功率,计算并确定齿轮的尺寸,确保动力的有效传递。
6. 有限元分析:对关键零件进行强度和刚度分析,通过危险截面的形变应力和位移测试,验证零件是否能承受工作中的负载。
7. 绘制图纸:最后,制作出详细的二维装配图和零件图,为后续的制造和组装提供蓝图。
本文旨在通过以上步骤,为关节型轮胎装配机器人的结构设计提供一套完整的解决方案,旨在提高装配效率,降低生产成本,推动汽车行业向更高的自动化水平迈进。这样的机器人不仅在轮胎装配上有着广泛的应用前景,也为其他类型的精密装配提供了宝贵的经验和技术参考。

轮胎装配机器人结构设计
轮胎通常由外胎、内胎、垫带 3 部 分组成 。也有 不需要 内胎的 ,其胎 体内层有气密性
好的橡胶层,且需配专用的轮辋。如图 1- 2,普通轮胎的技术规格和参 数如下:
(1 )轮胎外径:是 在相应 的轮辋上安装轮胎并按规定气压充气后,在 没有承重 时的
轮胎直径。
(2 )轮胎总宽:是 指包括 轮胎则面的文字及花纹的轮胎最大宽度。
(3 )适用轮 辋宽: 是适合 轮胎性 能的轮辋宽度。 标准轮 辋:最 适合 的宽度和 形状;
(用 in 表示) 适用轮辋:能够使用的轮辋。
(4 )轮辋直 径:是 指适合 轮胎的车轮的轮辋直径,同 轮胎内 径相同 。
(5 )轮胎断面宽: 从轮胎 的总宽 中去除轮胎侧面的文字及花纹厚度的 宽度。
(6 )轮胎高:是用 轮胎外 径减去 轮辋直径后的数字的 1/ 2。
(7 )胎面宽:是轮 胎踏面的宽度。是指两面最突出部分的宽度 。
(8 )胎面半径:是 指胎面 部分的曲率半径。
在选用轮胎时,都有具体的规格可以 依据, 例如:18 5/70R1486H,对应如下:
18 5:胎面宽(毫米)
70 :扁平比(胎高 ÷胎宽 )
R:子午线结构
14 :钢圈直 径(寸)
86 :载重指数(表示对应的最大载荷为 530 公斤)
H:速度代号(表示最高安全极速是 210 公里/ 小时 )
汽车轮胎 充气后,务必用平衡器进行平衡调整。即使是微小的失衡也会在高速行驶时
产生振动,因此要对所有车轮进行平衡调整。一般将平衡锤安置于轮辋法兰上比较便于调
整,铝制车轮因为法兰形状及外表好看 ,有时 也贴在 轮辋内 侧。
汽车轮胎安装方面应注意,确 认轮胎 没有与 车体接触以及轮胎和车轮 没有从车体突
出,安装时使用十字扳手、扭力扳手或冲击式动力扳手。 安装后 ,最 好在行驶 50 至 10 0km
之后,进一步紧固螺母。
1 .3 装配机器人定义及其基本组成
1 .3.1 装配机器人的定义
工业机器人一般是指用于机械制造业中代替人完成具有大批量、高质量要求的工作 ,
如汽车制造、摩托车制造、舰船制造、某些家电产品( 电视机 、电冰箱 、洗衣机 等) 、化
工等行业自动化生产线中的点焊、弧焊、喷漆、冲压、切割、电子装配及物流系统的搬运、
包装、码垛等作业的机器人。而装配机器人则是工业生产中, 用于装 配生产线上 对零件 或
部件进行装配的工业机器人,它属于高、精、尖的机电一体化产品,它是集光学、机械、微
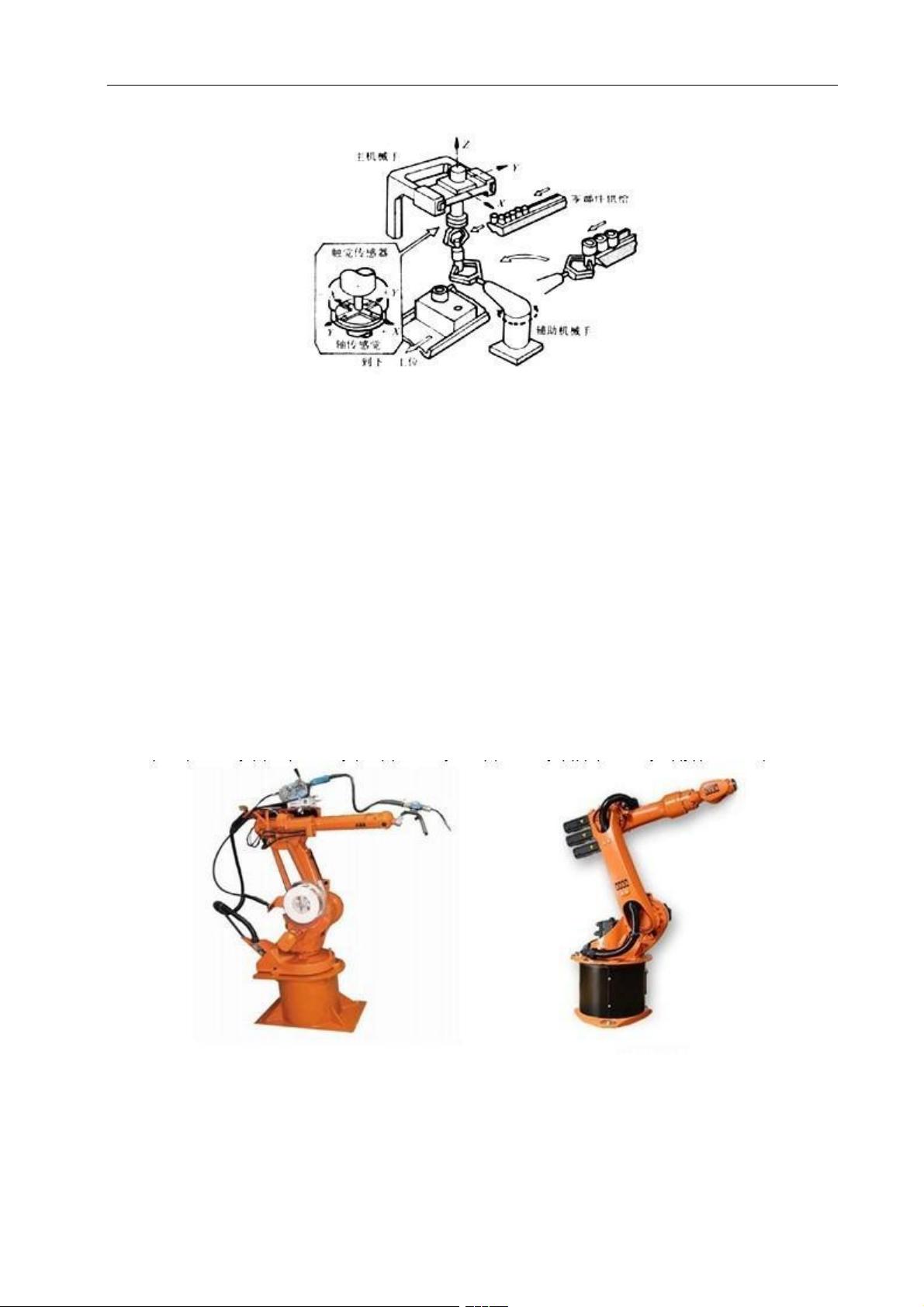
电子、自动控制和通讯技术于一体的高科技产品,具有很高的功能和附加值。如图 1 为装配
机器人的工作情况。
2
剩余38页未读,继续阅读
2023-07-15 上传
2022-11-04 上传
2022-11-14 上传
2023-07-12 上传
2023-07-12 上传
124 浏览量
2023-07-12 上传
2025-03-06 上传

omyligaga
- 粉丝: 101
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现程序A的监控启动机制
- Delphi与C#交互加密解密技术实现与源码分析
- 高效财务发票管理软件
- VC6.0编程实现删除磁盘空白文件夹工具
- w5x00-master.zip压缩包解析:W5200/W5500系列Linux驱动程序
- 数字通信经典教材第五版及其答案分享
- Extjs多表头设计与实现技巧
- VBA压缩包子技术未来展望
- 精选多类型导航菜单,总有您钟爱的一款
- 局域网聊天新途径:Android平台UDP技术实现
- 深入浅出神经网络模式识别与实践教程
- Junit测试实例分享:纯Java与SSH框架案例
- jquery xslider插件实现图片的流畅自动及按钮控制滚动
- MVC架构下的图书馆管理系统开发指南
- 里昂理工学院RecruteSup项目:第5年实践与Java技术整合
- iOS 13.2真机调试包使用指南及安装
