EMS高速磁浮列车自适应导向控制系统设计
需积分: 5 85 浏览量
更新于2024-08-12
收藏 415KB PDF 举报
"EMS型高速磁浮列车自适应导向控制器设计 (2008年) - 郝阿明,余龙华,常文森"
这篇论文聚焦于解决EMS(Electromagnetic Suspension)型高速磁浮列车导向系统在不同工作条件下控制性能不一致的问题。在高速磁浮列车中,导向系统起着至关重要的作用,它确保列车在悬浮状态下保持正确的行驶轨迹。由于列车运行环境的复杂性和动态变化,传统的控制器设计方法可能无法满足在整个运行范围内保持高效稳定的要求。
作者首先建立了导向系统的数学模型,这是控制系统设计的基础。通过设计电流环,他们实现了模型的降阶,简化了控制问题的复杂性。电流环通常用于调整电磁力,以控制列车的横向和纵向运动,确保其精确的定位。
接着,论文深入分析了导向系统参数变化的原因及其特性,这些变化可能源于列车速度、负载、线路条件等因素。基于这些分析,作者采用了自校正的自适应控制理论。自适应控制是一种能自动调整控制器参数以适应系统参数变化的策略,它允许控制器根据实际运行情况不断学习和优化自身性能。
在自适应控制理论指导下,作者设计了一种参数自适应的导向控制器。这种控制器能够实时监测和调整自身的参数,以应对导向系统在不同工况下的变化,从而确保在整个工作范围内保持良好的控制性能。
仿真结果显示,所提出的自适应导向控制器有效地解决了导向系统特性不一致的问题,提高了高速磁浮列车运行的安全性和稳定性。这一成果对于提升EMS型高速磁浮列车的控制技术水平具有重要意义,同时也为其他类似动态系统的自适应控制设计提供了借鉴。
关键词涉及的主要概念包括自适应控制、导向系统和磁浮列车。自适应控制是自动控制领域的一个重要分支,导向系统则是磁浮列车的核心组成部分,而磁浮列车作为先进的交通工具,其控制技术的研究一直是工程技术领域的热点。论文的中图分类号TP273属于自动化技术与计算机技术类别,文献标识码A则表明这是一篇原创性的学术论文。
2008
年
3
月
第
15
卷第
2
期
控制工程
Control
Engineering
of
China
文章编号:
1671-7
但
8(2
∞
8)
但
-011
6-
04
EMS
型高速磁浮列车自适应导向控制器设计
郝阿明,余龙华,常文森
(国防科学技术大学磁悬浮技术工程研究中心,中国长沙
41
∞
73)
Mar.2008
Vo
l.
15
,No.2
摘
要
EMS
型高速磁浮列车导向系统的工作条件变化范围大,采用一般方法设计的控
制器无法在整个工作范围内保持一致的控制性能。为了解决这个问题,研究了自适应导向控
制器的设计方法。首先,建立了导向系统的数学模型,通过设计电流环使模型降阶;并分析
了导向系统参数的变化原因及特性,在此基础上采用自校正的自适应控制理论,设计了参数
自适应的导向控制器。仿真结采表明,该控制器较好地解决了导向系统在整个工作范围内特
性不一致的问题。
关键词:自适应控制;导向系统;磁浮列车
中图分类号:
TP
273
文献标识码
:A
Adaptive
Controller
Design
of
Guidance
System
of
EMS
High
Speed
Maglev
Train
HAO
A-mi
晤
,
SHE
Lo
ng-hua ,
CHANG
Wen-sen
(E
唔
neering
Research
Center
of
Maglev
Technol
啼,
National
University
of
Defense
Technology
,
Ch
皿阱
a 41
∞
73
,由
ina)
Ab
曲回
t:
To the problems that the working conditions of the guidance system of
EMS
high
speed
ma
拚
v
train varies
in
a extensive range, and
由
e
controlllers by normal designing
me
也
ods
can not keep consistent performance in all
situations
,世
le
adaptive
gui
也
nce
control design method
is
discus
时.咀
le
model of
the
伊出
nce
system on
EMS
high
speed maglev train is set up, and the current loop is designed to
reduce
也
e
mod-
el
degree.τhe
reason and the characteristic of the
gui
阳
ce
sys
阳归
rameter
changi
鸣配
analyzed.
ßased
on
也础,
using the
self
国
.cki
鸣
C
回国
ller
design method, an adaptive guidance controller is
designed.
四
e
simulation result shows that the presented controller can
solve
也
e
problem
也就
the
guidance system working characteristic is unlike under different
wo
汰
ing
conditions.
Ke
y
words:
adaptive control;
gui
也
nce
system; maglev train
1
引言
[1)
为了克服运行过程中各种各样的侧向干扰力,
保证列车的安全、平稳运行,高速磁浮列车一般都
设计有主动导向系统。
EMS
磁浮列车的导向系统本
质上是不稳定的,必须外加控制器才能正常工作。
对于正常运行中的高速磁浮列车,与悬浮系统的工
作条件比较固定的特点不同,导向系统的工作条件
变化很大。在直道运行时,如果没有侧风影响,导
向系统基本上不起作用,其静态电流很小;但在弯
道运行时,导向系统必须产生侧向力平衡列车转向
架之间的扭转力以及未被超高所平衡的离心力,此
时,导向电磁铁的电流往往可以达到数十安培。该
种工作点的大范围变化对导向控制器的设计提出了
很高的要求,针对某一种特定工作条件,采用传统
控制器设计方法设计的导向控制器往往在其他工作
条件下性能不好,甚至使系统失去稳定。
收稿日期:
2
即
7
..(J7
-27;
收修定稿日期:
2
∞
7-1
0-
19
本文采用自校正控制器的设计方法,寻求在各
种工作条件下都有相近性能的导向控制器。
2
导向系统的结构与数学模型
[2)
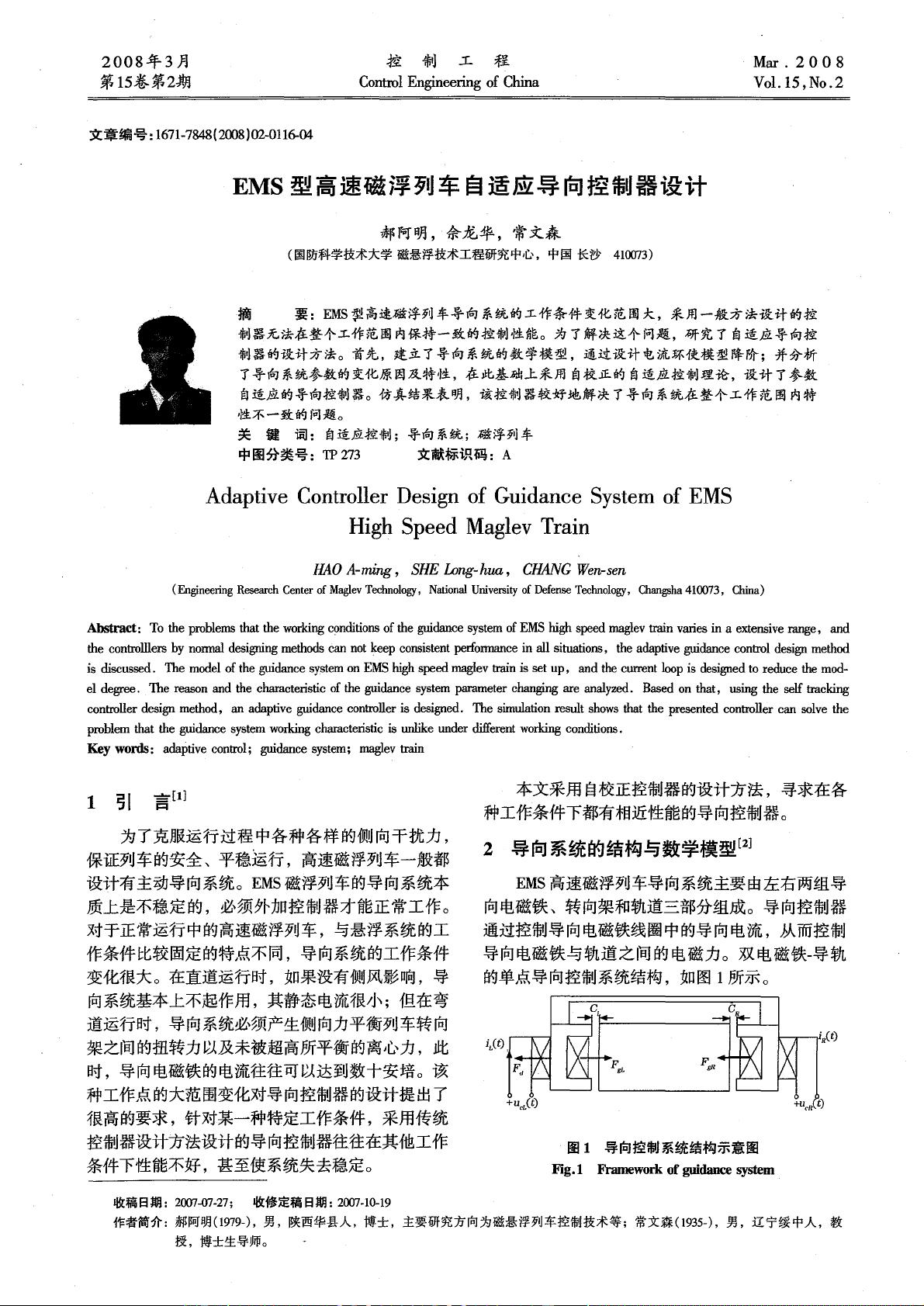
EMS
高速磁浮列车导向系统主要由左右两组导
向电磁铁、转向架和轨道三部分组成。导向控制器
通过控制导向电磁铁线圈中的导向电流,从而控制
导向电磁铁与轨道之间的电磁力。双电磁铁-导轨
的单点导向控制系统结构,如图
1
所示。
固
1
导向控制系统结构示意圈
Fi
g.l
Fr却回
work
of
guidance system
作者简介:郝阿明(1
979-)
,男,陕西华县人,博士,主要研究方向为磁悬浮列车控制技术等;常文森
(1935-)
,男,辽宁绥中人,教
授,博士生导师。
下载后可阅读完整内容,剩余4页未读,立即下载
2022-11-29 上传
2021-07-03 上传
2021-11-21 上传
2021-05-15 上传
2021-05-26 上传
2021-05-08 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38723527
- 粉丝: 3
- 资源: 953
 我的内容管理
展开
我的内容管理
展开







最新资源
- 毕业设计&课设-Matlab中的超声波模拟。TFM,反射系数,色散,TOF波包分析.zip
- 毕业设计&课设-Matlab中的扩散MRI仿真工具箱.zip
- 毕业设计&课设-MATLAB实现正交匹配寻踪,通过组合海来找到线性方程组的最稀疏解….zip
- 毕业设计&课设-MATLAB中混合连续和离散时间系统的仿真引擎。.zip
- 毕业设计&课设-MATLAB函数用于处理来自维也纳从头算模拟包(VASP)的数据,并执行与….zip
- 毕业设计&课设-MATLAB同步压缩工具箱.zip
- 毕业设计&课设-Matlab三维数字图像相关工具箱.zip
- 毕业设计&课设-Matlab中的曝光融合.zip
- 毕业设计&课设-Matlab中的车辆动力学与控制仿真.zip
- 毕业设计&课设-Matlab四旋翼仿真.zip
- 毕业设计&课设-MATLAB中用于二维仿真的有限元方法.zip
- 毕业设计&课设-matlab中的正交匹配寻踪仿真.zip
- 毕业设计&课设-MATLAB人类活动识别工具箱.zip
- 毕业设计&课设-MATLAB中的简单贝叶斯优化,具有与ANSYS中的模拟交互的界面。.zip
- 毕业设计&课设-Matlab中用于类python simulink的动态系统仿真库.zip
- 毕业设计&课设-Matlab算法交易回溯测试系统.zip
