"工业机械手控制系统设计:基于PLC的自动化生产技术应用"
版权申诉
本设计以基于PLC的机械手控制系统为主题,旨在研究和设计一种能自动控制并可重新编程以变动的多功能机器。工业机械手作为一种高科技自动生产设备,能够通过编程来完成各种预期的作业,兼具人和机器各自的优点,体现在智能和适应性上。机械手因其作业准确性和环境适应能力,在国民经济领域有广泛的发展空间。本设计旨在探讨机械手在工业生产中的应用及其自动化控制系统设计。
首先,本设计从机械手的发展背景和重要性入手,介绍了工业机械手作为工业机器人的重要分支,可以部分代替人工操作,按照生产工艺的要求来完成工件的传送和装卸,以及操作机具进行焊接和装配,从而改善了工人的劳动条件,提高了劳动生产率,加快了工业生产机械化和自动化的步伐。在高温、高压、粉尘、噪音等恶劣环境中应用更为广泛,受到各国的重视和投入。
其次,本设计介绍了机械手的发展现状和特点,强调了机械手作为一种自动控制并可重新编程的多功能机器,在不同环境中能完成各种工作。随着工业技术的发展,机械手的结构形式越来越复杂,功能越来越强大,专用性也逐渐减弱,逐渐成为一种灵活多用途的工具。
接着,本设计详细介绍了基于PLC的机械手控制系统的设计。PLC(可编程逻辑控制器)作为控制机械手动作的核心,能够根据预先编好的程序自动控制机械手的运动。本设计通过对PLC的工作原理和功能进行分析,设计了一套完整的机械手控制系统,并结合具体的案例进行了实际验证。
最后,本设计总结了基于PLC的机械手控制系统设计的优点和不足,并展望了未来的发展方向。机械手的自动化控制系统设计在工业生产中具有重要的应用意义,可以提高生产效率,减少人力成本,增强生产安全性。随着技术的不断进步和应用领域的拓展,基于PLC的机械手控制系统设计将会更加智能化、灵活化,并且将在更多的领域发挥重要作用。
综上所述,本设计以基于PLC的机械手控制系统为核心,通过对机械手的发展背景、特点及现状的介绍,详细阐述了基于PLC的机械手控制系统设计的原理和方法,并且展望了未来的发展趋势。希望通过本设计能够为机械手的自动化控制系统设计提供一定的参考和借鉴,推动机械手在工业生产中的广泛应用。
第二章 机械手总体方案的设计
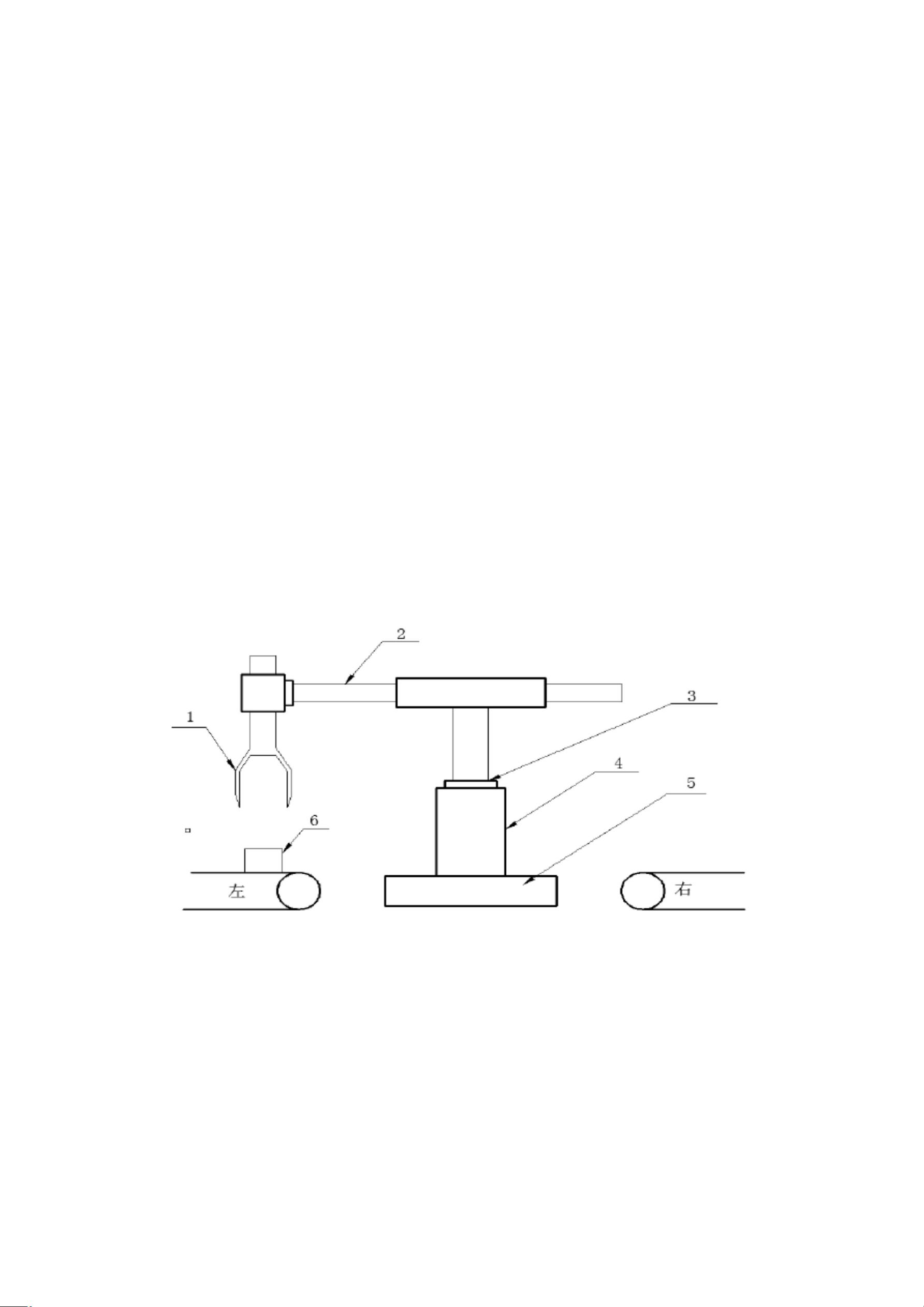
2.1.1 机械手的基本结构
图 2-1 机械手简图
剩余21页未读,继续阅读
2022-07-12 上传
2023-11-02 上传
2023-07-02 上传
2022-07-12 上传
2022-07-12 上传
2022-07-12 上传

คิดถึง643
- 粉丝: 4037
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
