ROS学习:Xacro到URDF转换与一致性验证可视化教程
10 浏览量
更新于2024-08-30
收藏 561KB PDF 举报
本文档主要介绍了如何将xacro文件转换成URDF文件,并确保生成的URDF文件的一致性,以及如何通过图形化方式进行可视化。Xacro是Robot Description Format (URDF) 的一种扩展,它简化了机器人模型参数的修改过程,使模型配置更加灵活。
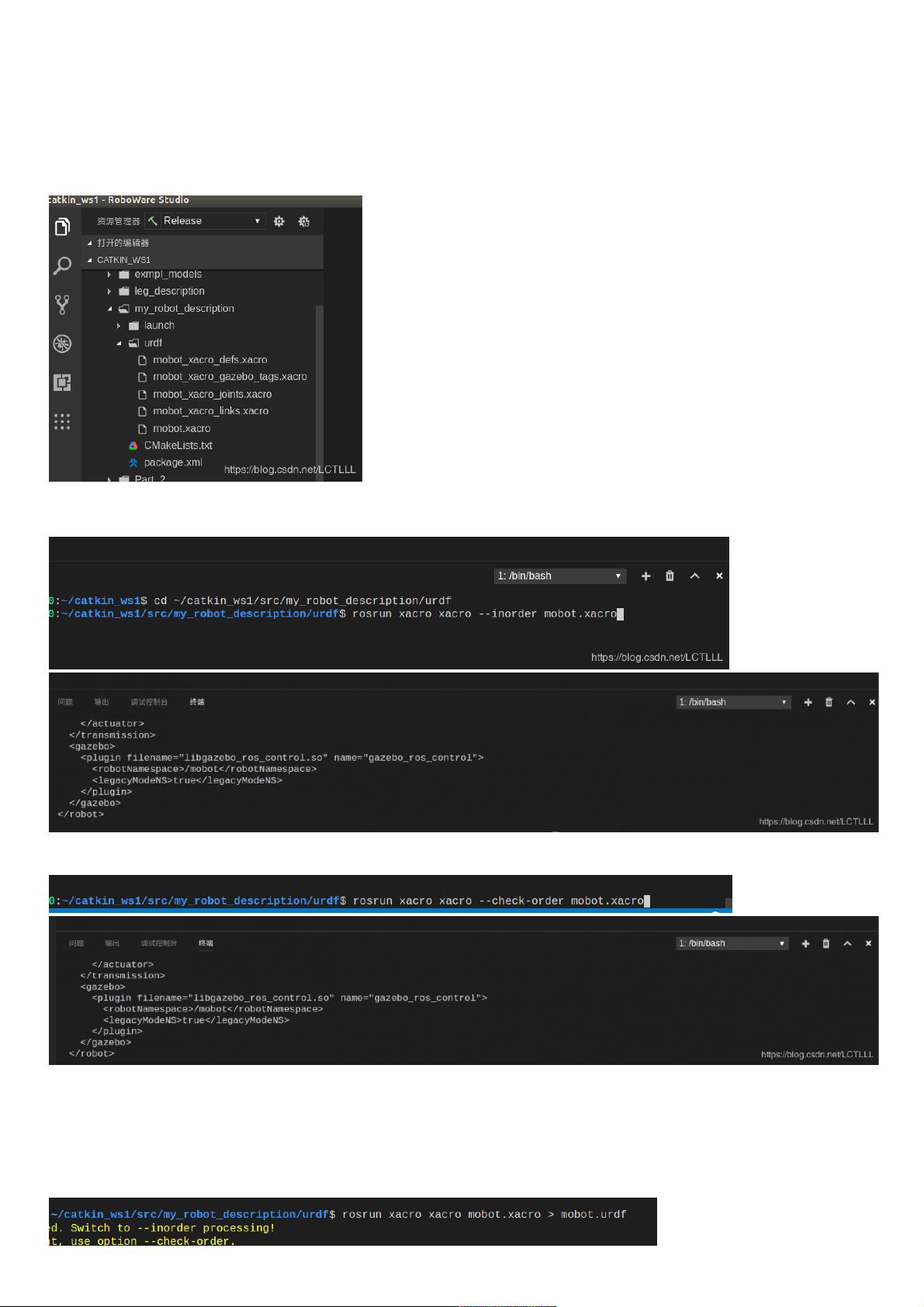
首先,要操作xacro文件,你需要进入包含该文件的目录,例如`~/catkin_ws1/src/my_robot_description/urdf`。在这个目录下,你可以执行以下步骤:
1. 使用`rosrun xacro xacro --inorder filename.xacro`命令来构建xacro文件。`--inorder`选项表示按照声明的顺序执行宏替换。执行此命令后,你会看到xacro文件中的参数被解析并生成相应的URDF代码。
2. 接下来,运行`rosrun xacro xacro --check-order filename.xacro`命令,用于检查xacro文件的宏替换顺序是否正确。如果这个命令与`--inorder`命令的结果一致,说明宏的顺序是正确的,xacro文件的一致性得到了验证。
3. 如果你希望生成新的URDF文件,可以直接使用`rosrun xacro xacro filename.xacro > filename_new.urdf`命令。这里可以根据需要自定义输出文件名,如`mobot.urdf`。
4. 完成URDF文件生成后,为了进一步确认其结构,可以使用`check_urdf filename_new.urdf`命令检查文件的语法和结构,以确保无误。
5. 对于连杆树的可视化,你可以通过`urdf_to_graphviz filename_new.urdf`命令生成一个Graphviz图文件(.gv)和对应的PDF文件。这些文件会展示连杆树的结构,便于理解和分析。
6. 最后,在终端中查看新生成的文件,如`mobot.gv`和`mobot.pdf`,它们分别代表了连杆树的图形表示和详细的结构描述。在文件管理器中打开这些文件,可以直观地看到机器人模型的结构。
通过以上步骤,作者LCTLLL详细记录了在ROS(Robot Operating System)环境中使用xacro创建、检查和可视化URDF模型的过程,这对于理解和管理复杂的机器人模型非常有帮助。
将将xacro文件转化为文件转化为URDF文件并在一致性上检查生成的文件并在一致性上检查生成的URDF文件文件,显示连杆树并以图形方显示连杆树并以图形方
式进行可视化式进行可视化
记录学习ROS的经验
xacro 是 URDF 的升级版,易于修改机器人模型参数,生成xacro文件后进行检查分为如下几步
1 . cd 至 xacro 文件所在目录
例:cd ~/catkin_ws1/src/my_robot_description/urdf
2 . 分别执行如下命令
rosrun xacro xacro --inorder filename.xacro
例:
显示如下部分结果
rosrun xacro xacro --check-order filename.xacro
例:
显示如下结果
[注注] 两行命令若执行结果相同,则xacro文件一致性相同
执行以下命令
rosrun xacro xacro filename.xacro > filename_new.urdf
即可在 catkin_ws1/src/my_robot_description/urdf路径下
生成filename_new.urdf,
文件名自定义
例:rosrun xacro xacro --inorder mobot.xacro > mobot.urdf
4 . 执行以下命令
下载后可阅读完整内容,剩余4页未读,立即下载
2017-05-23 上传
2022-10-03 上传
2022-09-23 上传
2022-02-11 上传
2021-01-12 上传
2022-11-28 上传
2021-08-22 上传
2022-11-13 上传
2022-07-03 上传

weixin_38627826
- 粉丝: 5
- 资源: 939
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新代数控API接口实现CNC数据采集技术解析
- Java版Window任务管理器的设计与实现
- 响应式网页模板及前端源码合集:HTML、CSS、JS与H5
- 可爱贪吃蛇动画特效的Canvas实现教程
- 微信小程序婚礼邀请函教程
- SOCR UCLA WebGis修改:整合世界银行数据
- BUPT计网课程设计:实现具有中继转发功能的DNS服务器
- C# Winform记事本工具开发教程与功能介绍
- 移动端自适应H5网页模板与前端源码包
- Logadm日志管理工具:创建与删除日志条目的详细指南
- 双日记微信小程序开源项目-百度地图集成
- ThreeJS天空盒素材集锦 35+ 优质效果
- 百度地图Java源码深度解析:GoogleDapper中文翻译与应用
- Linux系统调查工具:BashScripts脚本集合
- Kubernetes v1.20 完整二进制安装指南与脚本
- 百度地图开发java源码-KSYMediaPlayerKit_Android库更新与使用说明
