粒子滤波算法在MATLAB中的应用与二维目标跟踪
"粒子滤波matlab - 入门编程 - 被动定位系统 - 目标跟踪 - SIRF算法"
粒子滤波是一种用于非线性、非高斯动态系统的概率滤波方法,尤其适用于那些传统卡尔曼滤波无法有效处理的问题。在MATLAB中实现粒子滤波,可以帮助理解其基本原理并应用于实际项目,例如目标的被动跟踪。
在被动定位系统中,目标的跟踪通常是基于角测量进行的,而不依赖于距离信息。由于系统的观测性和非线性特性,递推滤波算法,如粒子滤波,成为了理想的解决方案。粒子滤波的核心在于通过一组随机样本,即“粒子”,来近似表示系统的后验概率分布。算法主要包括三个主要步骤:
1. **采样**:根据系统状态转移模型,生成新的粒子集合。在二维纯方位目标跟踪模型中,这涉及到根据上一时刻的状态(位置和速度)生成k时刻的粒子。
2. **权值计算**:根据观测数据更新每个粒子的权重。观测模型(通常包含测量噪声)用于计算每个粒子与实际观测的匹配程度,从而确定其权重。
3. **重采样**:根据粒子的权重重新生成新的粒子集合。低权重的粒子被抛弃,高权重的粒子被复制以形成新的种群,确保重要粒子对状态估计的贡献得以保留。
SIRF(Sample Importance Resampling Filter)算法就是一种基础的粒子滤波实现。在被动定位系统的二维纯方位目标跟踪中,SIRF算法的具体步骤如下:
1. **采样阶段**:利用状态转移模型(1.1)生成k时刻的粒子集合,其中考虑了系统的状态(位置和速度)以及系统噪声。
2. **权值计算阶段**:使用先验概率密度函数作为重要性函数,计算每个粒子的新权重,这些权重反映了粒子与观测值的匹配程度。
3. **重采样阶段**:根据计算出的权重,执行重采样过程,确保重要的粒子被保留下来,而低权重的粒子被新的粒子替代。
在实际应用中,还需要考虑一些优化策略,如避免粒子退化(所有粒子权重趋近于0或1的情况),以及提高计算效率的方法,如使用重要性密度的近似和减少粒子数量等。
在MATLAB中,可以构建相应的仿真环境,模拟目标的运动,设置观测模型和系统噪声,并实现粒子滤波算法来跟踪目标。通过调整参数和比较不同滤波器的性能,可以深入理解粒子滤波的优势和局限性,这对于理解和改进滤波技术至关重要。
姓名:朱林富 学号:08120361 研究方向:粒子滤波
基于粒子滤波实现的目标被动跟踪
1.1
被动定位系统是一个仅有角测量的系统,通常对于目标距离是不可测的。由
于实时处理和计算存储量的需求,通常选用递推滤波算法来实现。由于系统本
身的弱观测性,状态空间模型非线性强,导致滤波算法的收敛精度和收敛时间
满足不了要求。处理这种非线性、非高斯问题,粒子滤波算法有很好的表现。
粒子滤波的基本思想是:首先依据系统状态向量的经验条件分布,在状态
空间抽样产生一组随机样本集合,这些样本集合称为粒子;然后根据观测值不
断调整粒子的权重大小和样本位置;最后通过调整后的粒子信息修正最初的的
经验条件分布,估计出系统状态和参数。该算法是一种递推滤波算法,可以用
来估计任意非线性非高斯随机系统的状态和参数。
粒子滤波主要有三步基本操作:采样(从不含观察值的状态空间产生新的
粒子)、权值计算(根据观察值计算各个粒子的权值)、重采样(抛弃权值小
的粒子,使用权值大的粒子代替),这三步构成了粒子滤波的基本算法。
SIRF(Sample Importance Resampling Filter)算法是粒子滤波的一种基本算法。
1.2
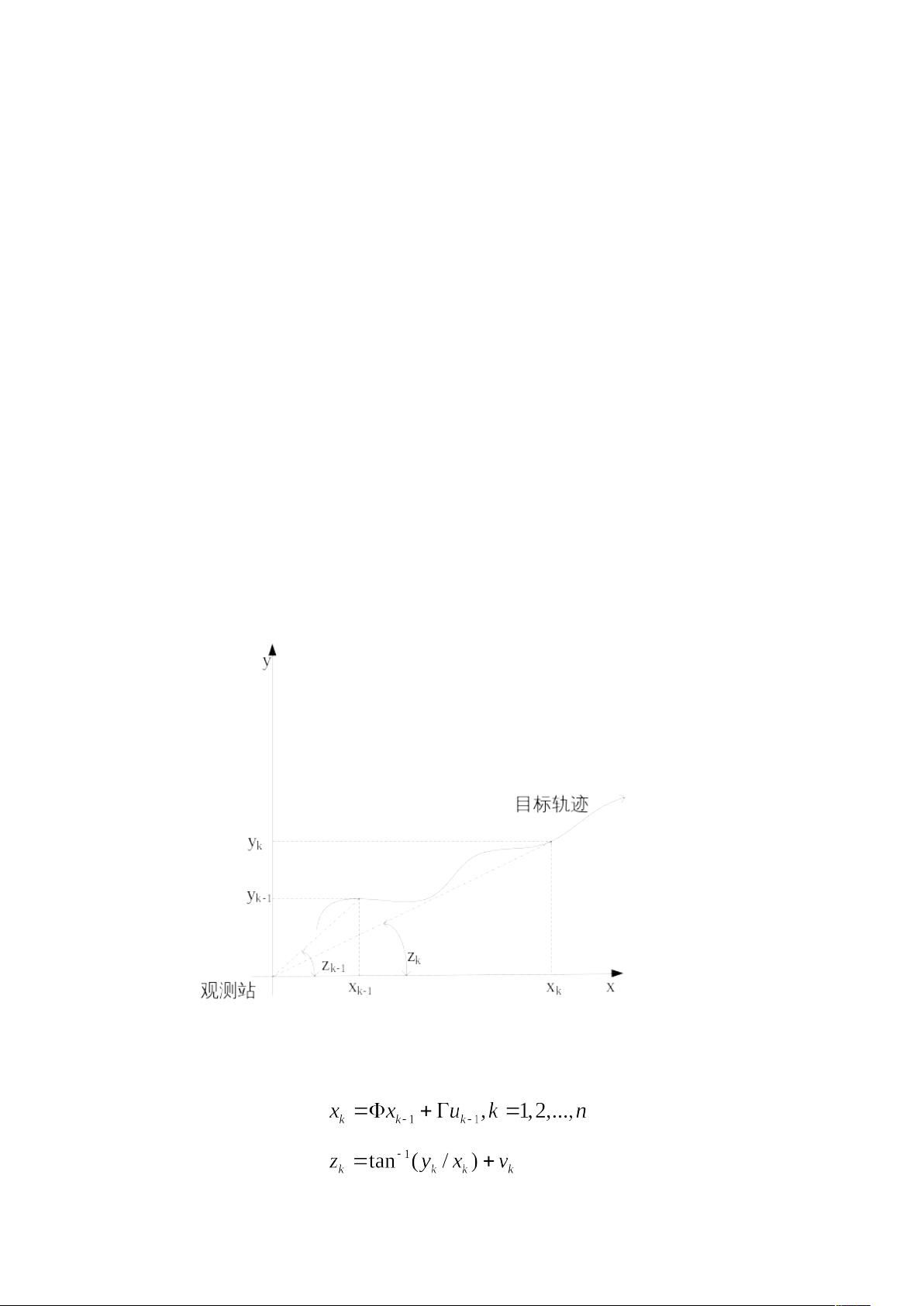
被动定位系统中二维纯方位目标跟踪模型如上图所示。以观测站为原点,
建立二维直角坐标系,图中标出了目标在 k 时刻、k-1 时刻的位置,目标到观测
站的距离 R 不可测。
系统状态模型为: (1.1)
系统观测模型为:
(1.2)
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
159 浏览量
401 浏览量
122 浏览量
2022-07-15 上传
256 浏览量

longde1
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- GNU链接器ld使用指南
- 精通GNU工具集:Autoconf、Automake与autotools详解
- 构建自己的网络安全实验室:网络测试实战指南
- SQLServer学生信息管理系统设计:需求分析与实体关系
- 开关电源设计关键因素分析
- 面向对象应用软件系统框架设计与实践
- 快速入门UCOS-II:在PC上搭建与运行示例
- 非线性滤波器设计优化方法
- 最优滤波理论专著:数据压缩与通信系统的关键
- 操作系统详解:管理与控制计算机资源
- C语言在嵌入式系统编程中的应用与技巧
- 高阶Perl:编程思维革命的经典之作
- 微波技术实验教程:从理论到实践
- JavaFX:打造丰富的移动应用程序
- GNUmake中文手册:构建与理解
- JavaFX技术深度探索:控件与布局指南
