学习型多混沌CPG:提升腿部运动与故障补偿能力
需积分: 9 47 浏览量
更新于2024-07-10
收藏 2.31MB PDF 举报
本文主要探讨了一种创新的解决方案,即利用具有学习功能的多个混沌中央模式生成器(CPG)来改进多足机器人的腿部运动控制,特别是针对腿部故障的补偿问题。传统的混沌CPG虽然能够产生复杂的步态模式,但在处理腿部运动失常或残疾时,可能会导致控制失衡,使得机器人无法精确地执行所需的行为。
在单一混沌CPG的基础上,研究人员引入了学习机制,这种机制基于模拟退火算法。该算法允许系统在面对腿部功能不一致时,能够自我调整和适应,确保每个腿部CPG的振荡频率保持同步或根据实际情况进行独立调整。这样,即使在某个部位出现问题,其他部位也能独立地维持运动,从而实现有效的故障补偿。
实验首先在四足机器人和六足机器人的物理仿真环境中测试了这一新型系统的性能,通过对比使用单个CPG和多个具有学习功能CPG所产生的轨迹,明显地显示出后者能够更好地模拟和补偿故障情况下的运动轨迹。随后,这些理论和实验结果被应用到真实的六足步行机AMOSII上,进一步验证了其在实际环境中的实用性。
通过学习功能的多个混沌CPG,不仅提高了多足机器人对复杂步态模式的控制能力,还增强了其对故障的适应性和自愈能力。这在神经控制领域具有重要意义,因为它展示了如何通过智能化的设计策略,提升机器人的运动灵活性和可靠性。这项研究为未来的机器人设计提供了新的思路,特别是在那些依赖自主适应性来应对不确定性和损坏的环境中,如服务机器人、探险机器人等。
generic feed-forward network, which can reverse the phase of the processed CPG outputs with respect to a given input
[42,51]. It is implemented to achieve a proper phase shift between the CTr- and FTi-joints and allow for sideward walking
[42]. The VRNs are also simple feed-forward networks, with each VRN controlling the three ipsilateral TC-joints on one side.
Since the VRNs act qualitatively like a multiplication function [40], they have the capability to increase or decrease the
amplitude of the TC-joint signals and even reverse them with respect to their control input. Controlling the TC-joint signal
in this way results in various walking directions, such as forward/backward or turning left/right (see [42] for walking exper-
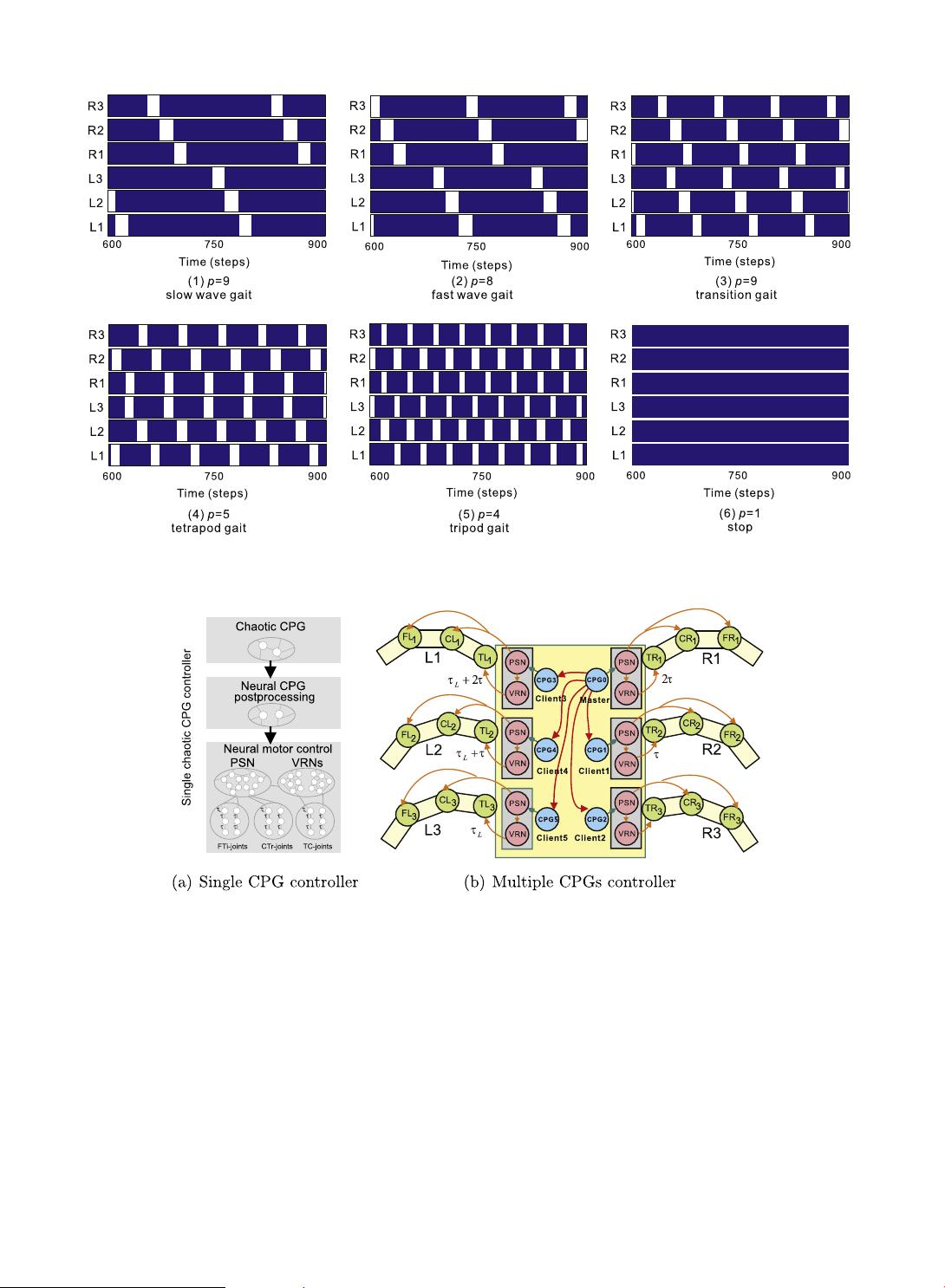
iments). Finally, the outputs of the PSN and VRNs are sent to the motor neurons through delay lines. The ipsilateral lag is
determined by a delay
s
(i.e., 16 time steps or 0.6 s, see Fig. 3) and the phase shift between both left and right sides are
given by another delay
s
L
(i.e., 48 time steps or 2 s, see Fig. 3a). This setup leads to biologically motivated leg coordination,
since the legs on each side perform phase shifted waves of the same frequency [54]. The frequency of the waves is defined by
the period p of the CPG, resulting in different gaits. In addition, sensory feedback can be integrated into the controller by
targeting the VRNs; thereby leading to sensor-driven orienting behavior [42,41].
Fig. 2. Different hexapod gaits for changing p and the stop status (p ¼ 1).
Fig. 3. Single chaotic CPG (a) and multiple chaotic CPGs (b) for a multi-legged robot.
G. Ren et al. / Information Sciences 294 (2015) 666–682
669
剩余16页未读,继续阅读
416 浏览量
138 浏览量
2024-05-06 上传
2021-06-01 上传
2021-04-08 上传
2024-05-23 上传
2021-05-30 上传
510 浏览量
266 浏览量

weixin_38718413
- 粉丝: 9
- 资源: 945
 我的内容管理
展开
我的内容管理
展开







