垂直多关节工业机器人设计及其控制系统解析
版权申诉
196 浏览量
更新于2024-06-23
收藏 1.03MB DOC 举报
"垂直多关节型工业机器人设计总体结构及控制系统设计"
随着科技的快速发展,工业机器人在各行各业的应用日益广泛,特别是在制造业中扮演着至关重要的角色。垂直多关节型工业机器人,因其灵活的工作范围和高精度的运动控制,成为了自动化生产线上的关键设备。这种机器人通常由多个旋转关节构成,能实现三维空间内的复杂运动,适用于装配、搬运、焊接等任务。
本设计主要关注1kg筒状物体的抓取,要求机器人通过各个自由度的协调完成指定动作。设计过程中,首先需要考虑的是机器人的总体结构,这包括了机器人的基座、大臂、小臂以及手腕部分。每个部分都需要精心设计,确保它们在运动时能保持稳定,同时具备足够的承载能力和运动精度。
大臂作为机器人主体的一部分,它的设计直接影响到机器人的工作范围和承载能力。通常,大臂会采用高强度材料制造,以保证其在重载下的刚性和耐久性。大臂内部则需要考虑驱动装置的布局,如电机、减速器和传动机构,这些是实现关节旋转的关键组件。
传动系统的选择也是设计中的重要环节。齿轮传动由于其高效率和良好的传动比,常被用于工业机器人的关节连接。通过精确计算和匹配不同齿轮的齿数,可以实现所需的运动速度和扭矩传递,确保手臂和手部的运动协调一致。
控制系统是机器人运行的大脑,它负责接收指令,解算运动路径,并通过伺服驱动器控制各个关节的运动。现代工业机器人通常采用基于计算机的控制系统,结合先进的控制算法(如PID控制),实现高精度的轨迹跟踪和动态响应。此外,安全防护和故障诊断功能也是控制系统必不可少的部分,以保障机器人在工作过程中的安全性和可靠性。
在实际应用中,还需要考虑到机器人的编程和操作简便性。用户友好的界面和标准化的编程语言使得非专业人员也能快速掌握机器人的操作,提高了工作效率。同时,集成传感器和视觉系统可以增强机器人的感知能力,实现更复杂的任务,如物件识别和定位。
垂直多关节型工业机器人的设计涉及机械结构、传动系统、控制系统等多个方面,每一部分的设计都需要精细考量,以实现高效、精准的自动化作业。随着技术的不断创新,未来的工业机器人将更加智能,具有更高的自主性和灵活性,进一步推动工业自动化的发展。

能以较大的变速范围满足机器人应用要求等特点。液压驱动输出功率大,惯性小,压力和流量容
易控制,常用在负载较大或需要防爆的场合。气动驱动成本低,污染小,易于管理,常用于较为
简单和负载较轻的机器人上。由于机器人在抓取物体时要实现精确的定位,应采用闭环控制系统,
而闭环控制系统一般用伺服电机来驱动,再加上伺服电机本身具有控制性能好,控制灵活性强,
可实现速度、位置的精确控制,对环境没有影响,体积小,效率高,适用于控制要求严格的中、
小型机器人等特点,故本次设计采用了伺服电机驱动。
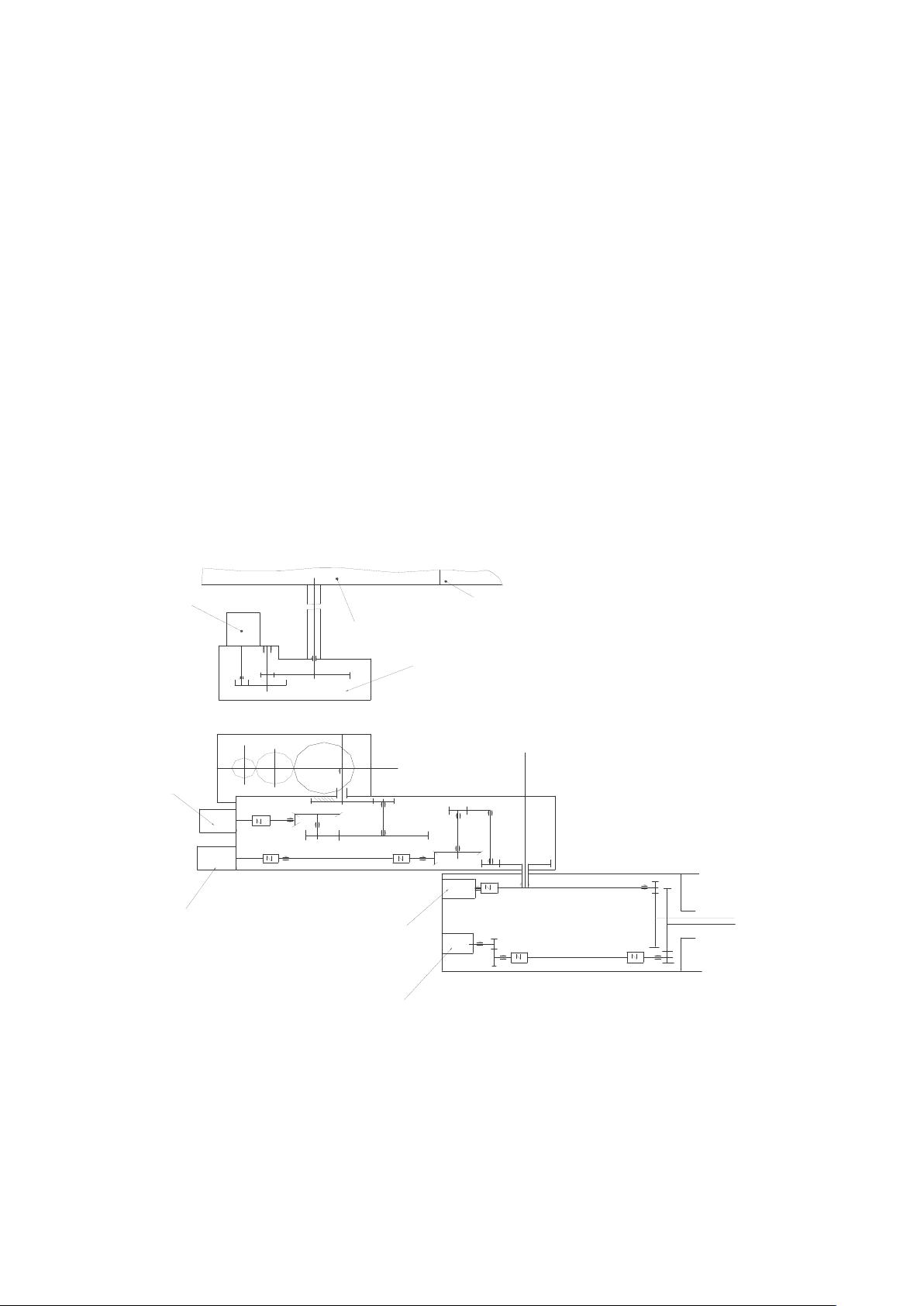
2.2.3 传动系统设计
机器人传动装置中应尽可能做到结构不宽松、重量轻、转动惯量小和体积小,在传动链中要
考虑采用消除间隙方式,以提高机器人的运动和位置控制精度。在机器人中常采用的机械传动机
构有齿轮传动、蜗杆传动、滚珠丝杠传动、同步齿形带传动、链传动和钢带传动等,考虑到如果
采用蜗杆传动机构,则必然以空间交叉方式变向,这样不利于简化系统的运动方程式结构形式。
而同步带、链条的传动机构因其结构的相对较长会影响机器人的结构。由于齿轮传动具有效率高、
结构好、工作性可靠、工作寿命长等优点,故选用齿轮传动。
2.2.4 工作范围
工业机器人的工作范围是根据工业机器人作业过程中操作范围和运动轨迹来确定,用工作空
间来表示的。工作空间的形状和尺寸则影响机器人的机械结构坐标形式、自由度数和操作机各手
臂关节轴线的长度和各关节轴转角的大小及变动范围的选择。
2.2.5 运动速度
机器人操作机手臂的各个动作的最大行程确定后,按照循环时间安排确定每个动作的时间,
就能进一步确定各动作的运动速度,各动作的时间分配要考虑多方面的因素,例如总的循环时间
的长短,各动作之间顺序是依序进行还是同时进行等。应试做各动作时间的分配方案表,进行比
较,分配动作时间除考虑工艺动作的要求外,还应考虑惯性和行程的大小,驱动和控制方式、定
位方式和精度等要求。
剩余47页未读,继续阅读
176 浏览量
点击了解资源详情
1261 浏览量
2021-10-08 上传
2023-07-12 上传
2023-07-11 上传
115 浏览量
122 浏览量
2023-07-12 上传

老帽爬新坡
- 粉丝: 98
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- jackson-core, Jackson的核心部分,它定义流API以及基本的共享抽象.zip
- MintyHydro:基于Arduino Raspberry Pi Zero W的Minty水培控制器
- 鼓风机和引风机的顺序功能.rar
- matlab代码sqrt-cnn_matlab:CNNMNIST从头开始分类
- 超高频RFID卡片检测demo
- pcb-canbus-to-spi
- spacer:穿越犹太城市的音频步道
- 深圳市合信MagicWorks HMI 3.6.1.zip
- Dism++系统设置小工具(禁用更新管理右键等).rar
- DataPipeline_wFlume:用水槽建立数据管道。 对于数据管道Pune聚会
- 弯管焊接机 摆动器(100行程).rar
- TrendCryptoCoin
- 基于Python的决策树判断是否降雪.zip
- jackson-annotations, 对于Jackson数据处理器,核心注解( 仅依赖于.zip
- rj-app:使用Nativescript设计的RJ事件的应用程序
- nodegrid-android-mdm
