深度学习驱动的视频对象选择:语义分割的子模态方法
需积分: 9 114 浏览量
更新于2024-09-07
收藏 982KB PDF 举报
"Submodular Video Object Proposal Selection for Semantic Object Segmentation" 是一篇由Tinghuai Wang撰写的研究论文,发表于Nokia Labs和Nokia Technologies的芬兰分部。该研究聚焦于在视频领域中利用数据驱动的方法来学习空间-时间上的一致性语义对象表示,这是实现视频对象分割的关键。论文的核心目标是通过学习一种能够捕捉连续帧中多个实例之间协同作用的数据驱动表示,从而实现对视频中对象的精确分割。
论文首先强调了在处理嘈杂检测结果时,理解并选择具有区分性和代表性的子集的重要性。作者将这个选择过程转化为一个优化问题,即最大化一个称为子模函数的数学概念。子模函数特性在于其增益随着元素数量的增加非减小,这对于确保选择的最优子集具有重要的理论支持。
作者的方法旨在挖掘长期的上下文依赖关系,这为视频中的对象分割提供了强大的稳健性。他们提出了一种算法,该算法能够有效地解决子模函数优化问题,从而提高视频对象分割的性能。与现有的最先进的方法进行了一系列严谨的实验,结果表明他们的方法在具有挑战性的数据集上表现出显著的优势。
关键词包括子模函数、视频语义对象分割和深度学习。这篇论文深入探讨了如何结合子模优化和深度学习技术来提升视频对象识别的准确性和一致性,对于理解视频数据的复杂结构和提高自动化分析能力具有重要意义。通过实证验证,它为视频理解和处理领域的研究者们提供了一个有效的工具和新的视角。
SUBMODULAR VIDEO OBJECT PROPOSAL SELECTION FOR SEMANTIC OBJECT
SEGMENTATION
Tinghuai Wang
Nokia Labs,
Nokia Technologies, Finland
ABSTRACT
Learning a data-driven spatio-temporal semantic representa-
tion of the objects is the key to coherent and consistent la-
belling in video. This paper proposes to achieve semantic
video object segmentation by learning a data-driven represen-
tation which captures the synergy of multiple instances from
continuous frames. To prune the noisy detections, we exploit
the rich information among multiple instances and select the
discriminative and representative subset. This selection pro-
cess is formulated as a facility location problem solved by
maximising a submodular function. Our method retrieves
the longer term contextual dependencies which underpins a
robust semantic video object segmentation algorithm. We
present extensive experiments on a challenging dataset that
demonstrate the superior performance of our approach com-
pared with the state-of-the-art methods.
Index Terms— Submodular function, semantic video ob-
ject segmentation, deep learning
1. INTRODUCTION
The proliferation of user-uploaded videos which are fre-
quently associated with semantic tags provides a vast resource
for computer vision research. These semantic tags, albeit not
spatially or temporally located in the video, suggest visual
concepts appearing in the video. This social trend has led
to an increasing interest in exploring the idea of segmenting
video objects with weak supervision or labels.
Hartmann et al. [1] firstly formulated the problem as
learning weakly supervised classifiers for a set of independent
spatio-temporal segments. Tang et al. [2] learned discrima-
tive model by leveraging labelled positive videos and a large
collection of negative examples based on distance matrix. Liu
et al. [3] extended the traditional binary classifition prob-
lem to multi-class and proposed nearest neighbor-based la-
bel transfer algorithm which encourages smoothness between
regions that are spatio-temporally adjacent and similar in ap-
pearance. Zhang et al. [4] utilized pre-trained object detector
to generate a set of detections and then pruned noisy detec-
tions and regions by preserving spatio-temporal constraints.
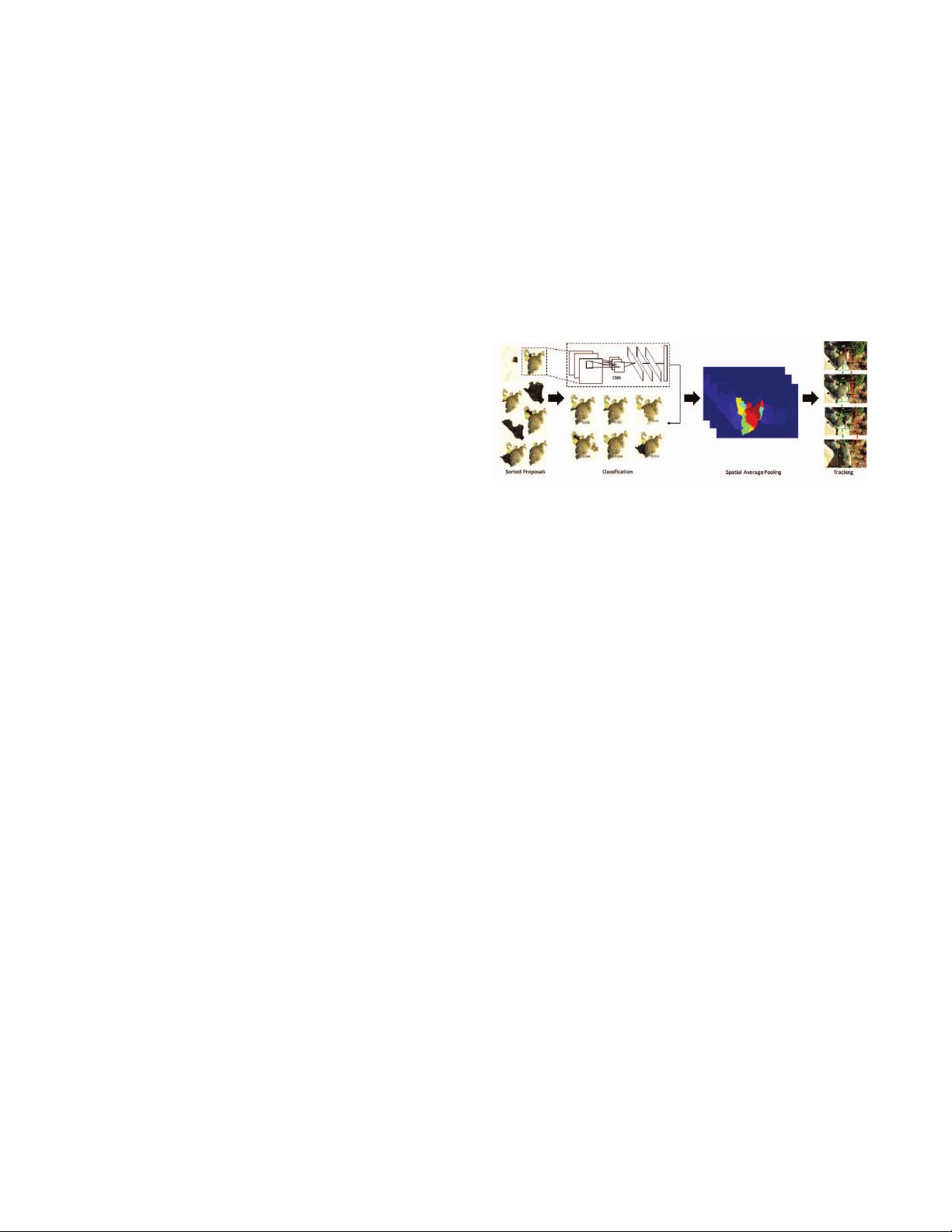
Fig. 1. An illustration of the proposed object discovery strat-
egy .
In contrast to previous works, we propose to learn a class-
specific representation which captures the synergy of multi-
ple instances from continuous frames. To prune the noisy
detections, we exploit the rich information among multiple
instances and select the discriminative and representative sub-
set. In this framework, our algorithm is able to bridge the gap
between image classification and video object segmentation,
leveraging the ample pre-trained image recognition models
rather than strongly-trained object detectors.
2. OBJECT DISCOVERY
Semantic object segmentation requires not only localising ob-
jects of interest within a video, but also assigning class label
for pixels belonging to the objects. One potential challenge
of using pre-trained image recognition model to detect ob-
jects is that any regions containing the object or even part of
the object, might be “correctly” recognised, which results in
a large search space to accurately localise the object. To nar-
row down the search of targeted objects, we adopt category-
independent bottom-up object proposals [5]. The proposed
object discovery strategy is illustrated in Fig. 1, in which the
key steps are detailed in the following sections.
2.1. Proposal Scoring and Classification
We combine the objectness score associated with each pro-
posal from Endres and Hoiem [5] and motion information as
a context cue to characterise video objects. We follow Papa-
zoglou and Ferrari [6] which roughly produces a binary map
,((( ,&,3
下载后可阅读完整内容,剩余4页未读,立即下载
2017-09-30 上传
2023-04-23 上传
2021-02-10 上传
2021-05-26 上传
2021-04-06 上传
2021-04-28 上传
2018-09-09 上传
2021-02-08 上传
2021-04-28 上传

大白菜丫丫
- 粉丝: 73
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







最新资源
- 人工智能实验——深度学习基于TensorFlow的CAPTCHA注册码识别实验.zip
- FPGA-ejij.rar_认证考试资料_VHDL_
- mivida_app_server
- demhademha.github.io
- 人工智能与自动化《人工智能》课程作业.zip
- samples-browser:浏览器应用的寓言样本
- 公交商场
- 参考资料-421.环氧煤沥青涂料性能试验报告.zip
- household:房屋存货管理申请书
- WebApiExample:一个示例Web API项目,用于测试不同的功能,例如简单和复合参数查询,自动生成的文档以及不同的输出格式配置(HTML,JSON)
- color-converter:轻松将RGB格式颜色转换为HEXInterger!
- coding-exercises:我在评估候选人时正在使用的一些编码练习
- 人工智能写词机.zip
- mn.rar_LabView_
- spring-custom-event-handling
- 项目1
