移动信标节点的无线传感器网络节点定位算法
156 浏览量
更新于2024-08-27
收藏 1.31MB PDF 举报
本文主要探讨了无线传感器网络(Wireless Sensor Networks, WSN)中移动信标节点(Mobile Beacon Node, MBN)的节点定位算法(Node Localization Algorithm, NLA_MB)。在实际应用中,由于移动信标节点的最大移动距离有限,为了提高整个网络中传感器节点的定位精度,研究者提出了针对MBN的NLA_MB算法。
首先,NLA_MB算法的核心思想是将信标节点的移动区域划分为若干个六边形网格,这样做可以简化问题并限制信标节点的搜索空间。网格划分考虑了信标节点的实际运动路径,同时兼顾了移动距离的约束,确保算法的可行性。通过这些网格,作者构建了一个优化模型,该模型旨在最小化节点定位误差,考虑到信标节点的运动轨迹、位置信息以及与固定辅助节点(Guide Sensor Nodes, GSNs)之间的通信。
信标节点利用虚拟力理论(Virtual Force Theory)作为启发式方法来近似求解这个优化模型。这种理论通常应用于群体行为模拟中,通过模拟虚拟力的作用来引导节点进行移动。信标节点根据自身的当前位置和GSNs提供的位置信息,确定出一条适合当前节点分布的最佳移动路径。这样做的目的是使得信标节点能够有效地覆盖其周围区域,从而更精确地影响其他传感器节点的定位过程。
接下来,当信标节点或固定锚定节点(Anchor Sensor Nodes, ASNs)提供位置信息时,传感器节点采用最大似然估计(Maximum Likelihood Estimation,MLE)算法来计算它们自己的坐标。MLE是一种统计学方法,它假设数据服从某种概率分布,然后找到最能解释观测数据的参数值。在这个过程中,传感器节点通过与其他节点的相对距离测量数据来估计自身的位置,结合信标节点的移动路径,提高了定位的可靠性。
通过仿真结果,作者展示了NLA_MB算法在实际场景中的性能,包括定位精度、收敛速度以及对信标节点移动范围的适应性。实验结果显示,相比于传统固定的信标节点策略,NLA_MB能够在有限的移动范围内实现更高的定位精度,对于动态变化的WSN环境具有较好的鲁棒性。
总结来说,这篇研究论文提出了一种新颖的无线传感器网络节点定位方法,通过引入移动信标节点和合理的优化策略,有效改善了网络中传感器节点的定位性能。这项工作不仅为无线传感器网络的设计提供了新的思路,也为实际应用中的定位问题提供了一种可行且高效的解决方案。
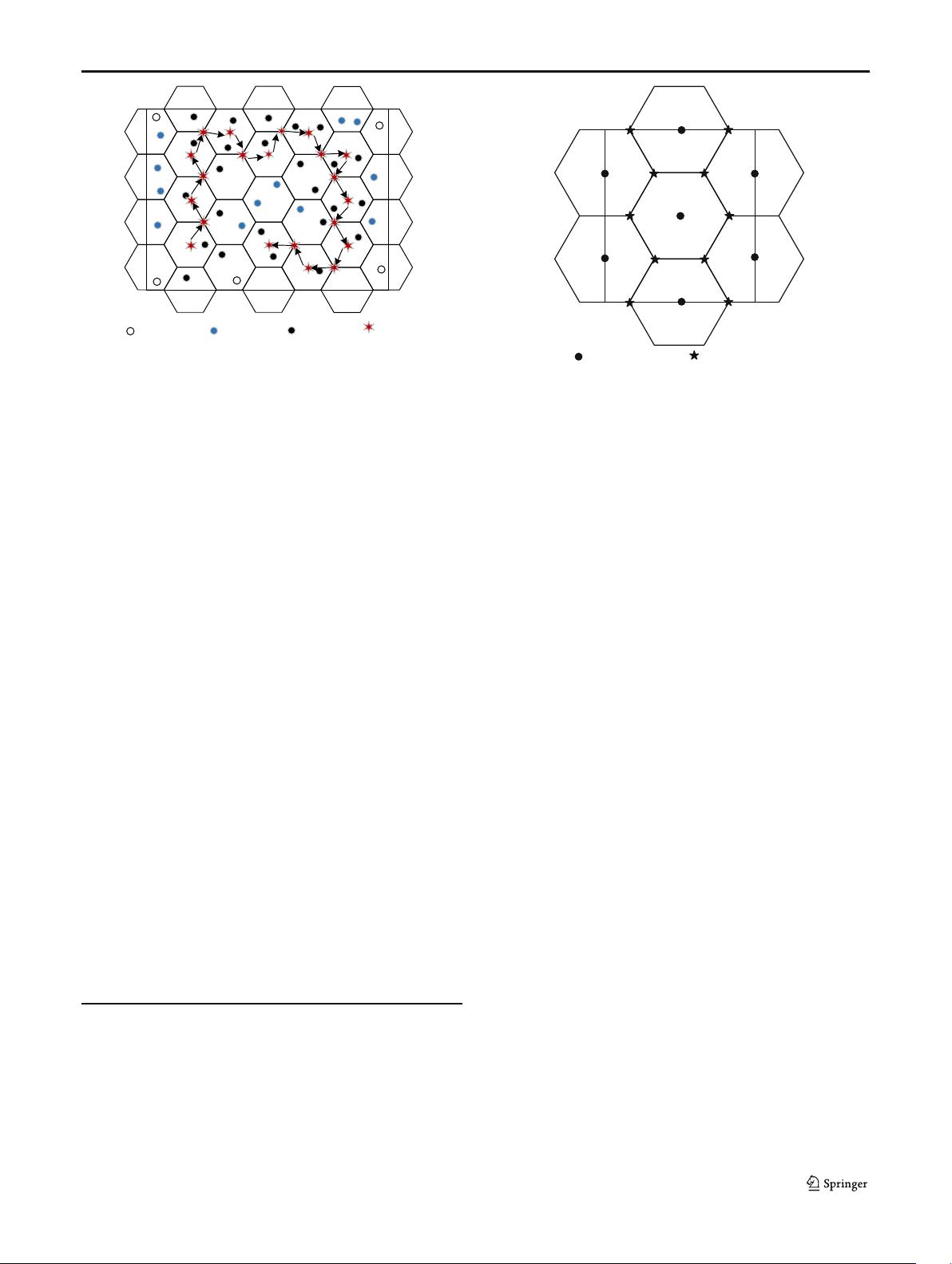
AsshowninFig.1, there are beacon node, anchor sensor
nodes, guide sensor nodes and unlocated sensor nodes. In the
area sensor nodes are randomly distributed and need to know
their own locations. Meanwhile, in order to reduce the system
cost and energy consumption, a mobile beacon node assists to
locate the sensor nodes. Beacon node stays at the initial center
of grid, selects an unstayed vertex of grid to move to. It stays at
the location and sends its location information packet some
time, and moves to another unstayed center of grid which has
the vertex. Because three adjacent locations are not collinear,
when beacon node selects sojourn location, it deletes the loca-
tion which is collinear with last two locations. Beacon node
keeps moving and sending its location information packet until
it reaches maximum movement distance. Sensor nodes receive
the information of more than 3 non-collinear locations of bea-
con node, collect RSSI value during communication, use
Kalman filter to reduce communication noise, calculate their
own coordinates by maximum likelihood estimation algorithm,
mark themselves as anchor sensor nodes and broadcast their
locations to assist other sensor nodes which are not located by
beacon node. The sensor nodes whose locations are not located
by beacon node, estimate their locations based on the location
information of beacon node and anchor sensor nodes in the
vicinity, mark themselves as guide sensor nodes, send their
locations to beacon node and guide the movement of beacon
node. Both anchor sensor nodes and guide sensor nodes obtain
their locations, but the locations of anchor sensor nodes are
more precise than the locations of guide sensor nodes.
As shown in Fig. 2, when WSNs start, beacon node needs
to divide its movement area into a number of hexagonal grids
of uniform size [25], and needs to number all hexagonal grids
and vertices of the grids in the movement area according to the
principle of from left to right and from bottom to top. For
example, grid(2,1) represents a hexagonal grid which is in
column 2 from the left and row 1 from the bottom.
Ding(2,2) represents the vertex which is in column 2 from
the left, and row 2 from the bottom. But NLA_MB algorithm
needs to solve the following three problems. First, how to use
mathematical formulas to express the constraint conditions,
such as movement path constraint, movement distance con-
straint, etc. How to establish the optimization model of node
localization errors. Second, how do sensor nodes calculate
their own coordinates with beacon node’ movement and loca-
tion information of anchor sensor nodes? Third, how beacon
node use heuristic algorithm to solve the optimization model
approximately and obtain movement path? The specific solu-
tions to the three problems are as follows.
2.1 Constraint analysis and optimization model
establishment
2.1.1 Constraint analysis
As shown in Fig. 1 and Fig. 2, if current sojourn location of
beacon node is center of grid, next sojourn location is vertex
of the grid. If current sojourn location is vertex of grid, next
sojourn location is center of the grid which has the vertex.
Then when current sojourn location of beacon node is center
of grid, the next optional location set is
N
g
¼
ding 1; 2j−1ðÞ; ding 1; 2 jðÞ; ding 1; 2 j þ 1ðÞfgp
g
¼ p 1; jðÞ
ding n−1; 2j−1ðÞ; ding n−1; 2jðÞ; ding n−1; 2j þ 1ðÞ
fg
p
g
¼ pn; jðÞ
ding i−1; 1ðÞ; ding i−1; 2ðÞ; ding i; 1ðÞ; ding i; 2ðÞ
fg
p
g
¼ pi; 1ðÞand i is even
ding i−1; 2mðÞ; ding i−1; 2m þ 1ðÞ; ding i; 2mðÞ; ding i; 2m þ 1ðÞ
fg
p
g
¼ pi; m þ 1ðÞand i is even
ding i−1; 2j‐2
ðÞ
; ding i−1; 2 j−1
ðÞ
; ding i−1; 2 j
ðÞ
; ding i; 2j‐2
ðÞ
; ding i; 2 j−1
ðÞ
; ding i; 2 j
ðÞ
f g others when i is even
ding i−1; 2j‐1ðÞ; ding i−1; 2 jðÞ; ding i−1; 2j þ 1ðÞ; ding i; 2j‐1ðÞ; di
ng i; 2jðÞ; ding i; 2 j þ 1ðÞ
f g
others when i is odd
8
>
>
>
>
>
>
<
>
>
>
>
>
>
:
ð1Þ
S8
guide
sensor node
beacon
node
unlocated
sensor node
anchor
sensor node
Fig. 1 Principle of NLA_MB algorithm
grid(1, 1)
grid(1, 2)
grid(2, 2)
grid(2, 3)
grid(2, 1)
grid(3, 1)
grid(3, 2)
ding(1,1)
ding(1,2)
ding(1,3)
ding(1,4)
ding(1,5)
ding(2,1)
ding(2,2)
ding(2,3)
ding(2,4)
ding(2,5)
center of grid
vertex of grid
Fig. 2 Numbering method
Peer-to-Peer Netw. Appl.
剩余12页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-02-22 上传
2021-02-10 上传
2021-02-10 上传
2021-02-11 上传
2021-02-10 上传
2021-02-07 上传

weixin_38526979
- 粉丝: 6
- 资源: 964
 我的内容管理
展开
我的内容管理
展开







最新资源
- Soundfonts-Demo:ipad 上的声音字体功能演示
- jiemian.rar_棋牌游戏_Visual_C++_
- openaq-api:使用Open AQ API的Web应用程序,用于在2020年11月期间获取Puente Aranda(哥伦比亚波哥大)监测站,参数PM 2.5
- Bloom_pattern_search:基于Bloom算法的模式搜索
- Uvi_Wave300c.zip_matlab例程_matlab_
- openlink-java:Openlink Java库
- TSPL指令语言参考例子和解释,开发的,可以考虑
- Scratch少儿编程项目音效音乐素材-【影视作品】音效-电视剧.幸福].专辑.(MP3).zip
- 【OpenCv基础】第四十一讲 创建包围轮廓的圆形边界.zip
- timeboard:佐治亚理工学院 CoC TA 时间表
- typography:项目徽标生成器
- python26_PCF8563_Different_
- Extension-Attributes:与Casper Suite一起使用的一些扩展属性bash脚本的集合
- 5个具体内容PPT陈述说明图表模板,拿来就可以用
- fsraft:F# Raft 共识
- 50--[环岛旅行单人版].zip源码scratch2.0 3.0编程项目源文件源码案例素材源代码
