慧鱼机器人模型详解:科学原理与工程应用
版权申诉
82 浏览量
更新于2024-06-23
收藏 2.77MB DOC 举报
"慧鱼机器人授课讲义文档详细介绍了慧鱼机器人的起源、构成、构件分类、材料、连接方式、控制方法以及软件应用和主要用途,旨在教育和培训学生及专业人士在创新、PLC和计算机编程方面的能力。"
慧鱼机器人是由Artur Fischer博士基于其六面拼接体专利创立的,它是一种工程技术模型,用于展示科学原理和技术过程,并在工业自动化机器的研发设计中作为模拟工具。慧鱼机器人模型由多种功能模块组成,这些模块分为机械构件、电气构件和气动构件。
机械构件包括齿轮、联杆、链条、履带、齿轴、齿条、蜗轮、蜗杆、凸轮、弹簧、曲轴、万向节、差速器、齿轮箱和铰链等,它们共同构成了模型的基础运动结构。
电气构件则涵盖直流电机、红外线发射接受装置、各类传感器(光敏、热敏、磁敏、触敏)、发光器件、电磁气阀、接口电路板等。接口电路板有两种,即电脑接口板和PLC接口板。电脑接口板内置微处理器,支持在线和离线编程,通过RS232串口与电脑连接,有四路马达输出、二路模拟信号输入和八路数字信号输入,还具备断电保护功能。PLC接口板则用于电平转换,直接与PLC连接。红外线发射接收装置可以远程控制模型,有效距离可达10米,能控制多达3个马达。
气动构件包括储气罐、气缸、活塞、气弯头、手动气阀和电磁气阀等,这些元件使模型具备气动控制能力。
所有构件主要由优质尼龙塑料制成,部分关键部位使用不锈钢芯和铝合金架加固,确保耐久性和稳定性。构件之间采用燕尾槽插接方式连接,允许六面拼接和多次拆装,便于构建各种教学和工业模型。
控制慧鱼机器人模型可以通过电脑接口板或PLC接口板实现,用LLWIN软件进行图形化编程,或者使用C、C++、VB等高级语言编写程序。LLWIN软件操作简便,支持实时控制。当使用PLC控制器时,则采用梯形图编程。
慧鱼机器人模型主要应用于学生创新思维的培养、PLC和计算机编程的培训及教学演示,它为教育者和学习者提供了直观、实践性强的教学平台,有助于提升技术和工程领域的实践技能。
分:卷筒和吊钩部分执行上下吊放重物的任务,小车行走部分执行横向移动重物
的任务,大车行走部分执行纵向移动重物的任务。
传动部分把机器动力部分所提供的运动形式、运动参数和动力参数,转变为
执行部分所需要的运动形式、运动参数和动力参数。例如把旋转运动变为直线运
动,把连续运动变为间歇运动,把高转速变为低转速,把小转矩变为大转矩等。
除了上述三个基本部分之外,一些复杂的机器还会不同程度地增加控制系统和辅
助系统等其他部分。以汽车为例,发动机是它的动力部分;车轮、悬架系统、底
盘及车身是它的执行部分;离合器、变速器、传动轴和差速器是它的传动部分。
除此之外,转向盘及其转向装置、换档杆、制动和油门构成它的控制系统;油量
表、速度表、里程表等仪表构成它的显示系统;前后灯、仪表盘灯构成;它的照
明系统;转向信号灯和车尾红灯构成它的信号系统。此外还有后视镜、刮
雨器、车门锁等其他辅助装置部分。
从制造的角度来看,任何机器都是由若干机械零件(如螺钉、弹簧、齿轮、
轴等)装配而成的。机械零件(简称零件)是机器最基本的组成要素,它是制造
的最小单元。
二、机械传动
1、带传动
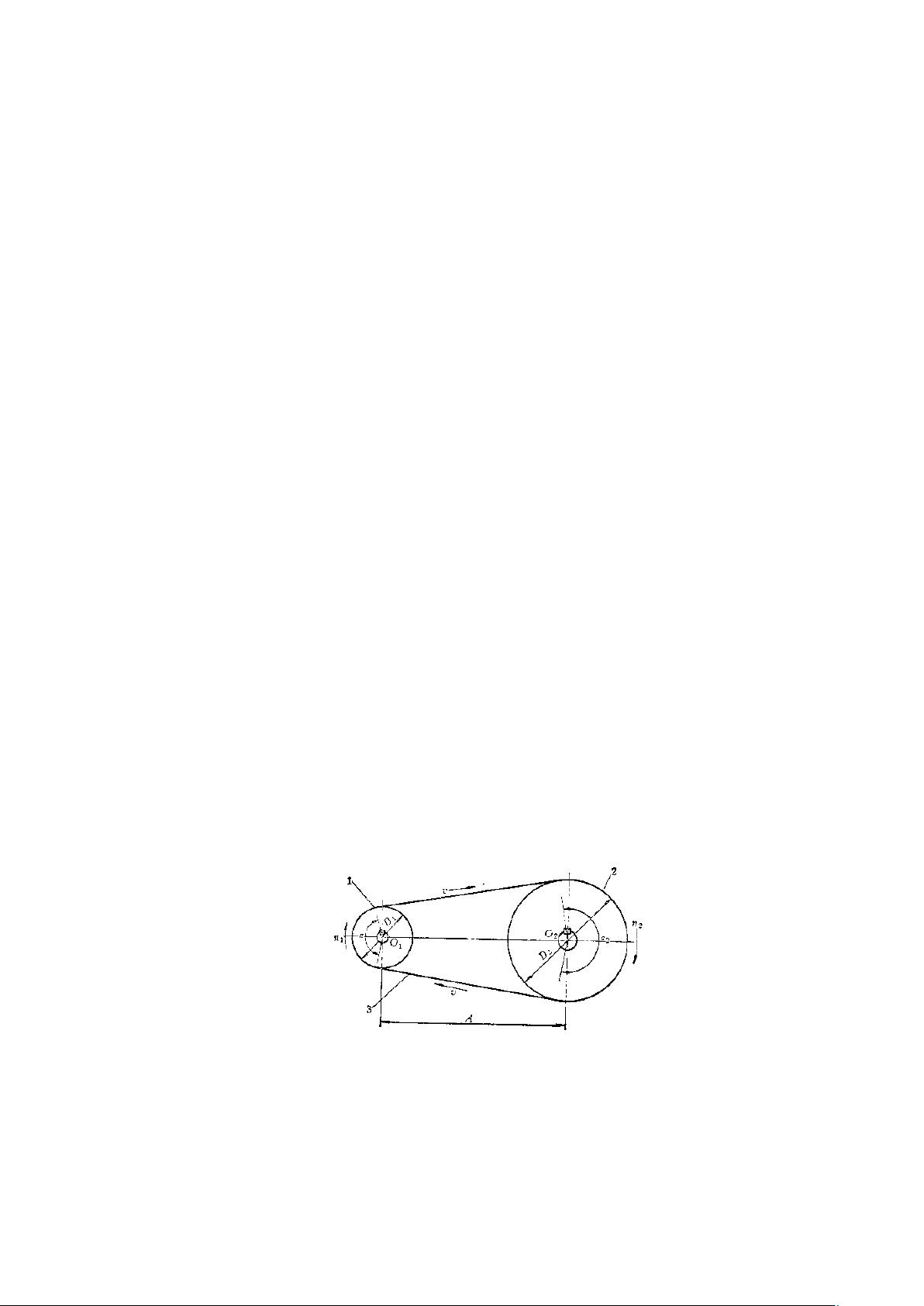
带传动是一种常见的机械传动,出大、小两个带轮及张紧在带轮上的传动带
组成,如图 2 所示、当主动轮 l 由电动机驱动后,通过胶带 3 带动从东轮 2 一起
转动。—般机床从电动机到主轴箱之间都是利用带传功来传递运动和动力的。
图 2 带传动
1、主动轮 2、从动轮 3、胶带
带传动的类型和特点:带传动按带的截面形状可分为:平带传动、V 带传动、
剩余22页未读,继续阅读
2023-07-12 上传
2023-07-12 上传
2023-07-12 上传
377 浏览量

老帽爬新坡
- 粉丝: 98
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- CUDA9.0+cudnn7安装大礼包.zip
- 拖动滑块进行验证
- Docker零基础学习全套教程(含项目实战和源码)
- tarea-express-v1
- 网钛淘拍系统官方网下载v1.51
- 着作权法案例判决评析——计算机程序之保护
- uorhousepositions:简单的Powershell脚本可下载UOR房屋位置并创建地图文件
- multisetdiff:与 setdiff 类似,但 A 的任何重复元素在 B 中每次出现时仅被删除一次-matlab开发
- 愤怒的小鸟-阶段4:愤怒的小鸟-阶段4
- devopsproject1
- gcc内网离线安装包,CentOS7亲测可用
- ion-tools:工具和实用程序,使ION网络工作和使用ION DID变得轻松自如
- 工程建设项目管理体制
- RecommenderOnTf2:基于TensorFlow 2.3实现的推荐系统神经网络,主要关注模型构建,基本不包含数据预处理阶段
- LFO - Maker:用于构建不同 LFO 类型的系统-matlab开发
- diabetic-retinopathy:基于人眼图像的糖尿病性视网膜病变分类系统
