leg-by-leg机动下两级采样TBD方法优化
版权申诉
110 浏览量
更新于2024-06-27
收藏 811KB DOCX 举报
本文档探讨了一种创新的被动跟踪方法,即"基于leg-by-leg机动的两级采样被动跟踪"。目标被动跟踪是通过对目标的被动观测信息进行连续估计,用于水下态势感知的重要手段,特别是对于低频分析记录(Lofar)的方位-频率参数分析。传统的TBD(检测前跟踪)技术如粒子滤波TBD算法,尽管在理论上展示了完整的跟踪理念,但在实际应用中,尤其是处理高维状态空间时,如同时考虑方位和频率观测,面临着采样效率低下的挑战。这导致了随着维数增加,所需的粒子数量急剧增多,对计算资源和存储容量造成巨大压力。
文献[9]尝试通过区分影响量测的维度,将高维采样简化为两个低维,但这可能导致位置信息更新不连续,无法充分累积能量,未充分利用TBD算法的时间优势。文献[10]提出了局部搜索采样策略,试图针对可测状态分量进行优化,以提高采样效率,但这种方法仍受限于状态向量的划分。
Rao-Blackwellized粒子滤波作为一种降低维数的技术,通过线性与非线性状态的分离来减轻负担,但每粒子运行一次Kalman滤波的额外计算开销并未明显减少。相比之下,leg-by-leg机动策略因其在实际操作中的便捷性,如在机动性较差的观测载体(如船艇)上的适用性,为解决高维采样问题提供了一个新视角。这种方法可能涉及逐段或分阶段地执行机动动作,以便更有效地处理复杂的跟踪任务,同时保持对目标动态的精确估计。
然而,文档指出,虽然leg-by-leg机动可能是一个解决方案,但目前尚未在该领域中广泛应用,相关的理论研究和技术优化仍有待深入。作者们可能正在探索如何结合leg-by-leg机动的特性与现有的采样策略,比如利用局部搜索或Rao-Blackwell化,以降低算法复杂度,减少粒子数量,同时提高跟踪精度和实时性。这种方法的发展可能涉及对机动策略的优化设计,以及与粒子滤波算法的有效融合,以应对高维状态空间的挑战,从而推动被动跟踪技术在实际应用中的进一步发展。
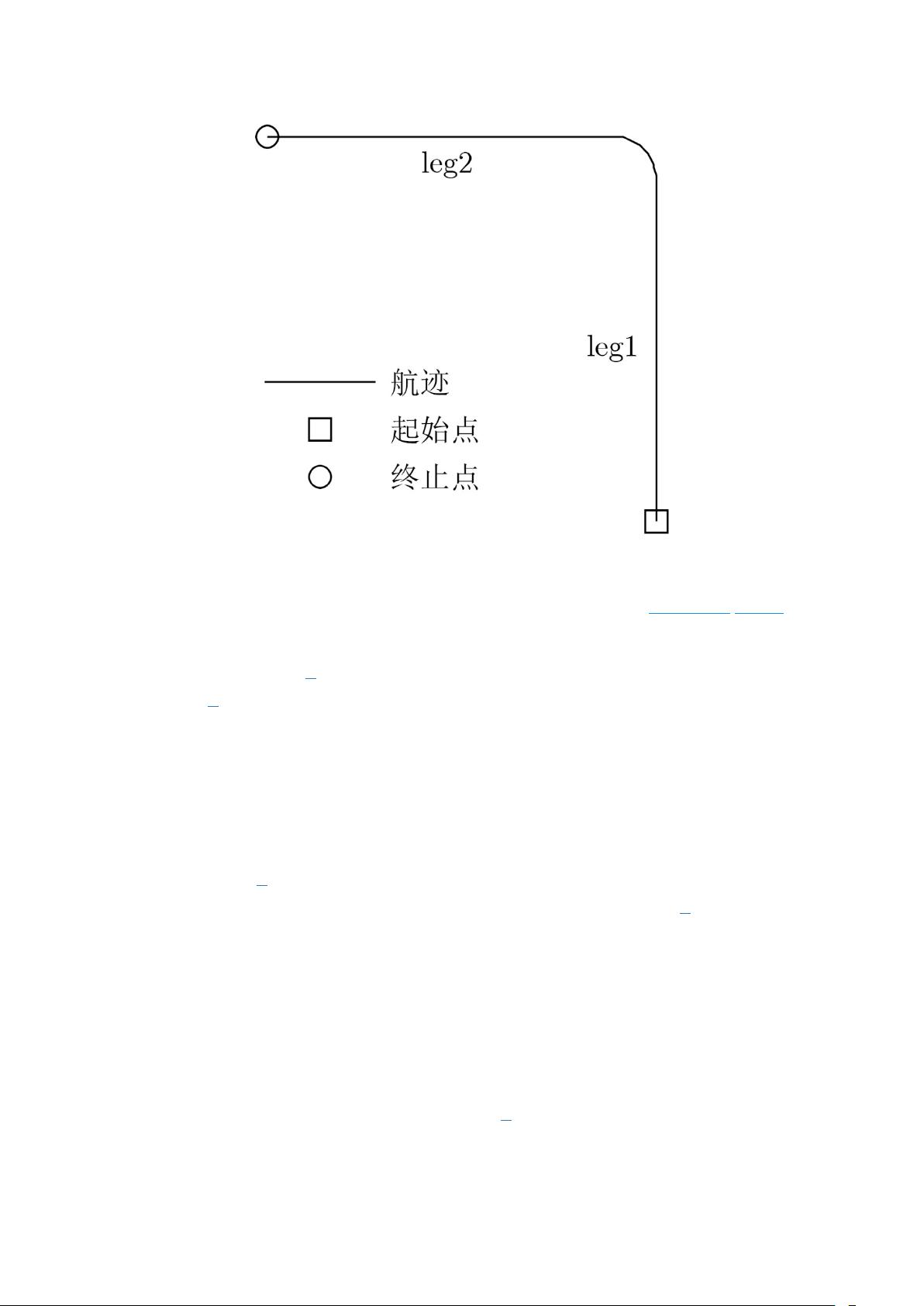
图 1 leg-by-leg 机动模式示意图
下载: 全尺寸图片 幻灯片
被动量测信息是目标运动参数的不完全描述,且状态空间模型的非线性程度较高,因
此需分析系统可观测性
[18]
。目标运动参数可观测的必要条件是测量信息维度大于目标运动
方程阶数
[19]
,在目标匀速直线运动(运动方程阶数为 1)的假设下,为保证目标运动参数可观
测,测量信息的维度应大于 1。增大观测信息维度的方法包括:增加观测量数目,如同时
观测目标的方位、频率、相位差变化率等信息;增加观测站数目,如采用双基地、多基地
观测;增大观测站运动方程阶数,如观测站进行圆周机动、抛物线机动。
方位-频率观测情况下,当观测站处于 leg-by-leg 机动模式中转向前的匀速直行段(leg1
段)时,测量信息维度为 2,在观测站和目标存在相对运动的情况下对于匀速直线运动的目
标具备可观测性
[20]
。但是,在目标运动分析问题中,除了讨论是否可观测,还应讨论可观
测性的强弱,这关系到目标状态估计的收敛率、收敛速度、估计精度等性能
[21]
。目标运动
状态的估计依靠观测量的变化,变化幅度越大越有利于估计。在水下目标探测场景下,由
于观测站和目标航速较低且相距较远,因此方位变化幅度较小;由于水下目标线谱固有频
率较低,因此多普勒效应不显著,频率变化幅度较小。特别是在低信噪比情况下,目标方
位变化和多普勒频移的检测更加困难。因此,leg1 段虽然具备可观测性,但可观测性较
弱。
当观测站处于 leg-by-leg 机动模式中转向后的匀速直行段(leg2 段)时,观测站转向前后
等效于两个不同位置的观测站同时对目标进行观测
[22]
,通过增加观测站数量的方式进一步
增大了观测信息维度,构成观测维数冗余。转向后目标方位变化率会发生较大幅度的变
剩余16页未读,继续阅读
2022-05-20 上传
2021-08-11 上传
2021-05-12 上传
2022-03-09 上传

罗伯特之技术屋
- 粉丝: 4499
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- AES:AES算法库在C中以128位192位256位实现
- 【地产资料】XX地产 新LOGO_的PPT模板及使用规范P8.zip
- java学习
- Excel模板学生成绩统计表Excel(含图含公式).zip
- abacus:CLI应用程序的简单遥测
- editorconfig-lint:符合 editorconfig 的 Lint 代码
- php-cli-tools:一系列可帮助PHP命令行实用程序的工具
- homelab:Matt Layher机器的配置管理。 麻省理工学院许可
- coffemud-mapper:CoffeeMud映射器
- 毕业设计&课设--毕业设计选题系统.zip
- 半导体国产替代系列十二:5G浪潮来袭,滤波器需求与替代的成长旋律-200221.rar
- smartcrop-sharp:通过SharplibVips使用Smartcrop的节点模块
- Pyro4:Pyro 4.x-Python远程对象
- mucahitsaratar.github.io
- apigeeOrgAdmin:用于管理 Apigee 组织
- Excel模板财务收支表87.zip
