DSP驱动下永磁同步电机控制系统串行通信详解
6 浏览量
更新于2024-09-01
收藏 275KB PDF 举报
本文主要探讨了如何在DSP控制永磁同步电机的系统中实现串行通信,以便于实时监控和调节电机的运行状态。首先,对于永磁同步电机控制系统,它基于直接转矩控制方法,构建了一个双闭环系统,通过检测电压、电流等参数,利用磁链和转矩观测器以及调节器实现精确的转矩控制。该系统的关键在于将定子电流和电压转换到α-β静止坐标系,以便进行有效控制。
串行通信在控制系统中的作用至关重要,它允许PC机与DSP之间进行数据交换,实现远程监控和实时调整。具体来说,串行通信的实现分为三个步骤:
1. 硬件设计:硬件设计主要包括使用MAX232这种兼容RS-232标准的电平转换芯片,将TMS320LF2407 DSP的+3.3V供电系统与外部的+5V设备(如PC机的串口)连接起来。MAX232以其低功耗、高集成度和双通道特性,确保了数据的可靠传输。
2. 上位机程序设计:上位机(通常是PC机)的程序设计涉及编写用于发送和接收命令、读取传感器数据的软件,这些数据被用来监控电机状态并调整控制参数。用户界面可能包括实时数据显示和远程控制功能。
3. 下位机程序设计:下位机(DSP)程序设计则是处理来自上位机的命令,解析数据,执行相应的控制操作,并将结果通过串行通信回传给上位机。这部分代码通常包含数据解析、指令执行和通信协议处理。
通过串行通信,实验人员可以灵活地远程监控电机的工作状况,及时调整参数,优化控制性能,从而大大提高永磁同步电机控制系统的开发效率和实用性。整个过程强调了通信接口在现代电机控制系统中的核心地位,以及在设计和实现过程中需要充分考虑的硬件和软件协同工作。
实现永磁同步电机控制系统的串行通信实现永磁同步电机控制系统的串行通信
本文以DSP控制永磁同步电机为例,介绍在整个控制系统中串行通信的实现。
在开发一套以DSP为核心的永磁同步电机控制系统时,需要及时观察驱动系统中的各个变量,同时还要对一些程序进行控
制,修改特定参数。数字信号处理(Digital Signal Processing,简称DSP)是一门涉及许多学科而又广泛应用于许多领域的
新兴学科。DSP在实际运行中不能用外接的端口进行控制,需要用DSP自带的串行通信模块来解决这一问题。
1 永磁同步电机控制系统
同步发电机为了实现能量的转换,需要有一个直流磁场。而产生这个磁场的直流电流,称为发电机的励磁电流。根据励磁电流
的供给方式,凡是从其它电源获得励磁电流的发电机,称为他励发电机,从发电机本身获得励磁电源的,则称为自励发电机。
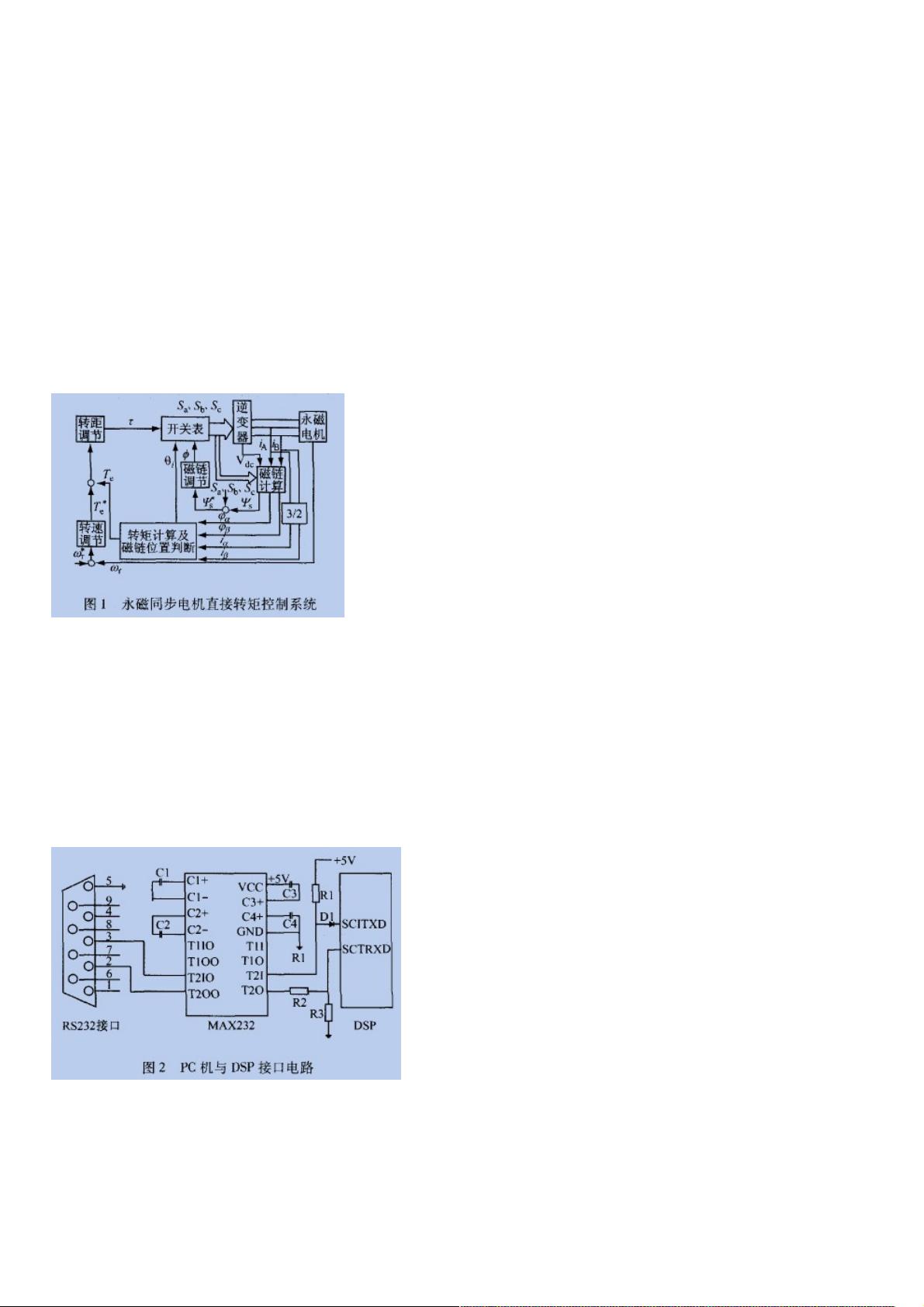
永磁同步电机控制系统框图如图1所示,采用直接转矩控制方法,这是19世纪80年代提出的交流电机高性能控制策略。本控制
系统是一个速度和转矩的双闭环控制系统。系统利用电压、电流传感器检测直流母线电压Vdc。及定子二相电流i 和i ,通过坐
标变换将定子三相坐标系中的电压、电流变量转换为α-β静止定子坐标系中的二相分量。将由磁链及转矩观测器得到的定子磁
链、转矩实际值作为反馈量,与磁链、转矩给定值进行比较,所得到的误差信号通过磁链、转矩调节器的滞环控制单元后,获
得0、1控制信号,再综合考虑当前定子磁链所在的区域,选择适当的电压空问矢量控制定子磁链的旋转速度及方向,即可直
接快速地实现转矩调节。
如果试验人员能够及时地观测并调节转矩、磁链、电压、电流等控制参数,将会极大地提高电机控制系统的开发效率。
2 串行通信的实现
PC机与DSP串行通信的实现包括三个部分,即硬件设计、上位机程序设计、下位机程序设计。
2.1 串行通信硬件设计
从本试验平台实际需要考虑,实现计算机对生产现场的监测和控制。图2是TMS320LF2407串行通信接1:1电路 [1]。该电路
采用了符合RS-232标准的驱动芯片MAX232(MAX232芯片是美信公司专门为电脑的RS-232标准串口设计的单电源电平转换
芯片,使用+5v单电源供电)进行串行通信。MAX232芯片功耗低,集成度高,+5 V供电,具有2个接收和发送通道。由于
TMS320LF2407采用+3.3 V供电,需要将5 V的1tI1L电平变换为3.3 V高电平,整个接口电路简单,可靠性高。
2.2 上位机程序设计
Delphi是一种面向对象的可视化编程工具,拥有功能强大的集成开发环境和速度极快的编译器,兼具Visual C++的强大功能和
VB易学易用的特点。Delphi,是Windows平台下着名的快速应用程序开发工具(Rapid Application Development,简称
RAD)。它的前身,即是DOS时代盛行一时的“BorlandTurbo Pascal”,最早的版本由美国Borland(宝兰)公司于1995年开
发。DELPHI 拥有一个可视化的集成开发环境(IDE),采用面向对象的编程语言ObjectPascal和基于部件的开发结构框架。
Delphi它提供了500多个可供使用的构件,利用这些部件,开发人员可以快速地构造出应用系统。开发人员也可以根据自己的
需要修改部件或用Delphi本身编写自己的部件。通过安装MSComm控件,可在Delphi环境下方便地实现串行通信[2]。本系统
选用事件驱动法,该方法程序响应及时,可靠性高。只要了解使用MSComm的属性及事件的用法就可以实现对串口的操作。
下载后可阅读完整内容,剩余3页未读,立即下载
2020-10-24 上传
2020-10-22 上传
点击了解资源详情
点击了解资源详情
2020-10-24 上传
点击了解资源详情
2020-10-24 上传
点击了解资源详情
点击了解资源详情

weixin_38622475
- 粉丝: 0
- 资源: 912
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
