并联Delta机器人动态抓取与传送带跟踪系统
版权申诉
21 浏览量
更新于2024-06-23
收藏 3.2MB DOC 举报
"并联Delta机器人的传送带动态抓取系统设计"
本文主要探讨了并联Delta机器人在动态抓取系统中的应用,特别是针对传送带上的物体进行高效、精确的跟踪和抓取。Delta机器人因其高速、精准的特性,在3C电子产品、食品包装、生物制药、3D打印等多个领域有广泛的应用。
首先,文章介绍了全球工业机器人技术的发展现状,强调了Delta机器人的优势,如快速运动、高精度定位和高效工作。随后,深入剖析了Delta机器人的运动学,包括正逆解的计算,这对于理解机器人的运动规律和控制至关重要。同时,还涉及了传送带和相机的标定,这是实现物体准确追踪的基础。
接着,论文提出了一种基于PID的跟踪算法,并对其进行了改进,以适应传送带上物体的动态变化。PID算法是工业自动化中常用的控制策略,用于调节机器人跟踪目标的能力。改进的跟踪算法旨在提高跟踪的准确性和响应速度。
此外,文章还详细描述了名为Conveyor Administrator的软件设计流程,该软件解决了目标物体的筛选、排序、位置状态更新以及多机器人协同作业的关键问题。这确保了机器人能够有效地识别、定位和抓取传送带上不断移动的目标。
动态跟踪是本文的核心内容。通过视觉检测系统获取物体的位姿信息,结合传送带编码器的数据,计算出物体在机器人坐标下的实时位置。机器人采用改进后的跟踪算法,预测物体的动态位置,调整自身速度和末端执行器的姿态,从而实现对目标物体的动态跟踪抓取。这种能力对于处理连续不断的物体尤其重要,需要机器人快速移动并合理规划抓取顺序,以减少遗漏。
论文最后,作者通过大量实验数据和分析验证了该动态跟踪方法的有效性,为实际应用提供了技术支持,并为多机器人协同作业提供了一种可行方案。关键词涵盖了并联Delta机器人、传送带跟踪、PID算法、多机器人协作和数据管理等核心概念。
这篇文档详细阐述了并联Delta机器人在动态抓取系统中的设计与实现,对于提升机器人在生产线上的自动化水平和效率具有重要意义。
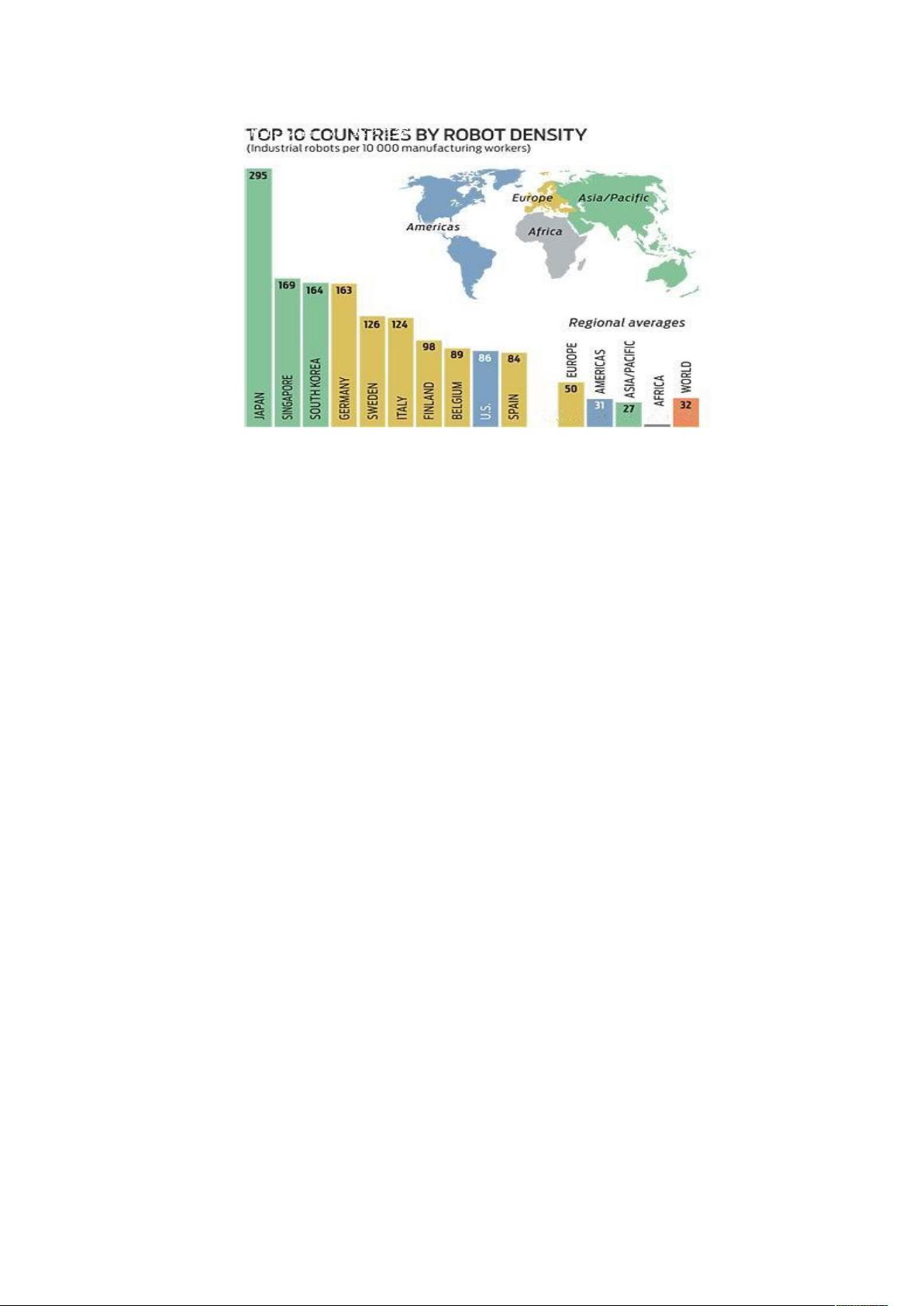
图 1-3 每 10000 工人占有机器人的个数
Figure 1-3 The number of robot per 10000 workers
图 1-3 是依照每 10000 个工人使用工业机器人数量的比例绘制的,从图中可以清
晰的知道,日本工人的工业机器人分配密度达到了世界平均水平的 9 倍,几乎是第二
位新加坡的 2 倍。排在前 5 的国家分别是:日本每一万工人拥有 295 台工业机器人、
新加坡 169 台、韩国 164 台、德国 163 台、瑞典 126 台。虽然在这前五位国家中,有
三位属于亚洲地区,但欧洲的工业机器人普及程度是全世界最广的。欧洲国家工业机
器人密度为每万名工人 50 台、北美洲为 31 台、亚洲 27 台。
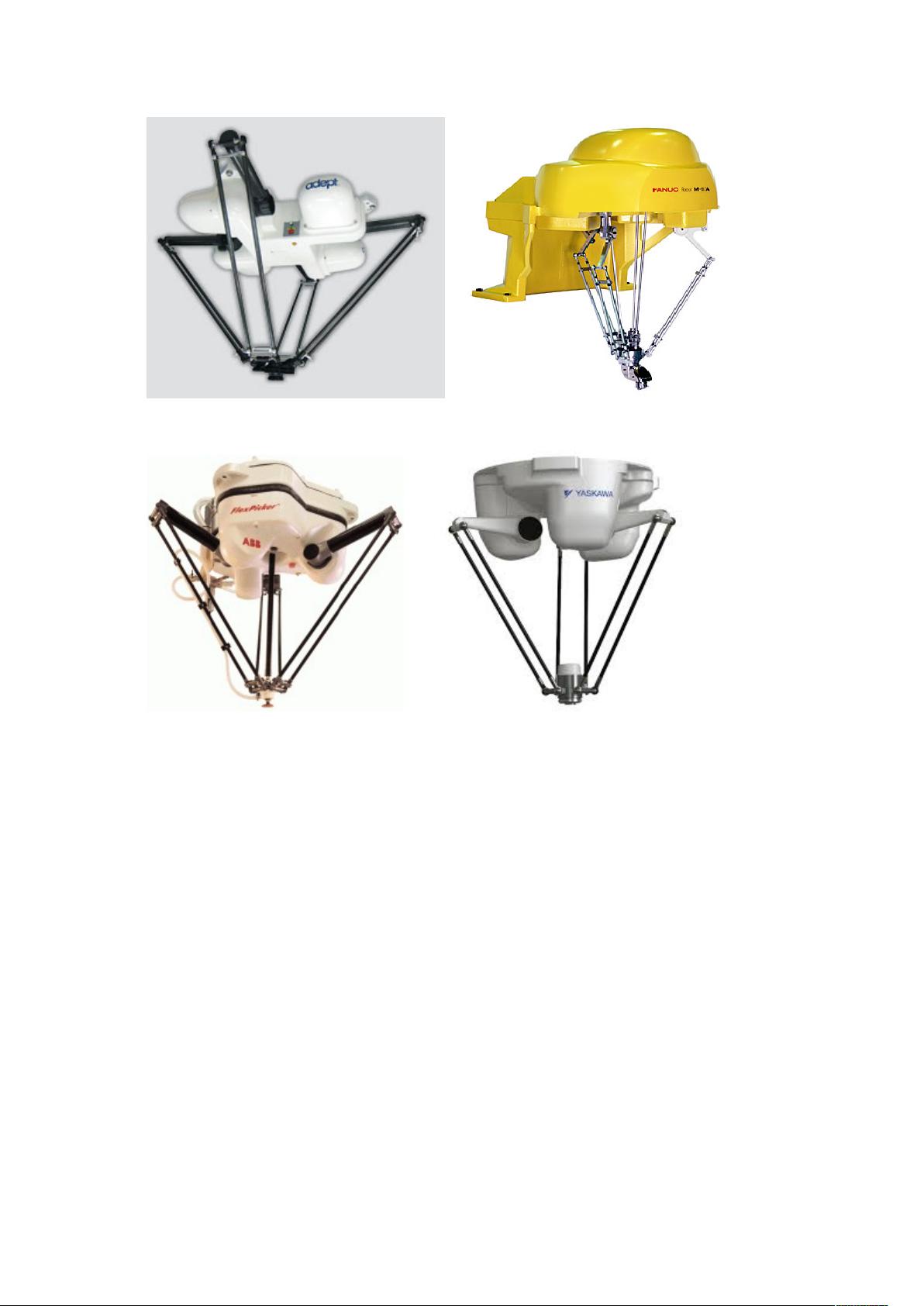
国外的工业机器人制造厂商:瑞典的 ABB Robotics;瑞士的 staubli; 日本的
FANUC,Yaskawa,NACHI,OTC,MITSUBISHI; 德 国 的 KUKA Roboter; 美 国 的
Adept Technology,American Robot,Emerson Industrial Automation,S-T Robotics; 意 大 利
COMAU; 英 国 的 AutoTech Robotics; 加 拿 大 的 Jcd International Robotics; 以 色 列 的
Robogroup Tek。
与国外相比,我国工业机器人基础研究启动比较晚,从上世纪七十年代初期才开
始发展。截止 2010 年底,国内正在工作和使用的工业机器人数量超过 50000 台,普及
程度仍不及欧美等发达国家,这个数量大致是德国的 1/4、日本的 1/10,由此可知,
中国工业机器人行业发展空间巨大。到 2014 年底,中国购买机器人的数量将位居全球
首位。预计到 2015 年底,我国机器人需要数量大约为 35000 台,占全球总量的 16.9%,
而中国对机器人的需求量在全球仍将保存首位。分析表示,未来五年,中国工业机器
人市场需求增长率可达 35%,呈井喷式增长。到 2016 年或成为全球最大的机器人市场。
目前“十二五”规划中,中国开始实行经济转型。中国的制造业面临着向智能化、

剩余68页未读,继续阅读
2022-06-30 上传
2024-03-08 上传
2021-08-14 上传
123 浏览量
2021-08-14 上传
121 浏览量
2023-07-11 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







