数码相机定位技术:圆心坐标计算与代码实现
需积分: 32 44 浏览量
更新于2024-07-30
1
收藏 5.08MB PDF 举报
"数码相机的定位及其程序代码"
在本文中,我们探讨了数码相机的定位技术,特别是如何通过相机标定来确定相机之间的相对位置。相机标定是计算机视觉领域中的一个重要步骤,它允许我们校正相机的内在畸变,并获取相机的外在参数,例如相机的位姿和焦距。
首先,文章提到了数码相机的成像原理,这基于光学的小孔成像模型。当光线近似为轴向并且相机对焦准确时,相机的成像过程可以简化为小孔成像,这意味着物与像之间存在中心透视关系。这种关系使得靶标中的圆形在图像上被透视变换为椭圆。透视变换保持了切点、公切线和直线的性质,这是计算圆心的关键。
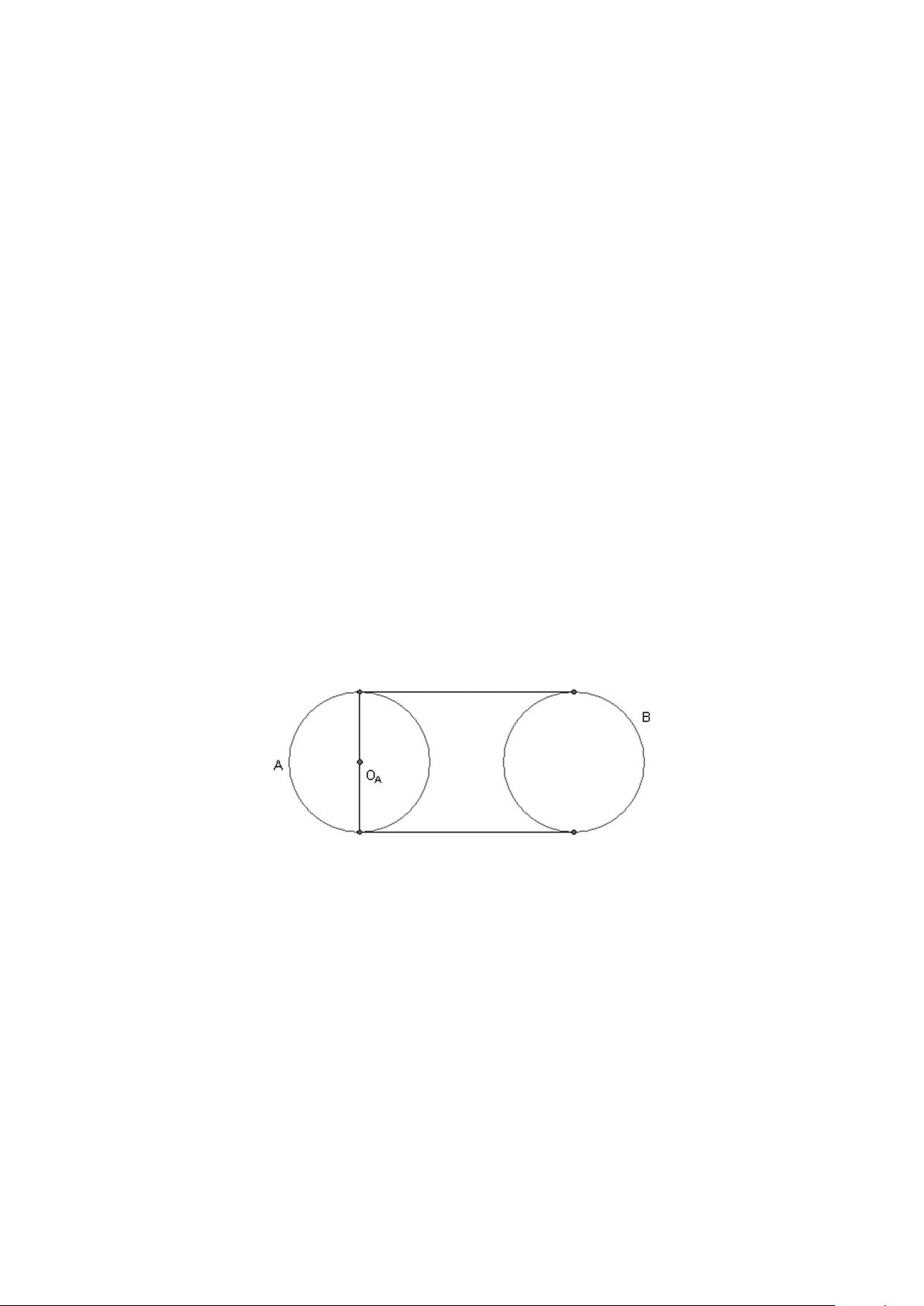
为了计算圆心,文章提出了一种方法:利用靶标中三个不共线圆的公切线。对每个圆,找到它与其他两个圆的两对切点,并连接这些切点,它们的交点即为圆心在像平面上的像。通过这种方式,可以在靶标照片上椭圆的像中重复这个过程,找出圆心的像坐标。
接着,通过实际实验来验证模型的准确性。制作一个带有同心圆环的特殊靶标,用数码相机拍摄,然后使用模型计算圆心像的位置。通过分析不同角度拍摄的照片,可以评估模型的稳定性。
在确定相机相对于靶标的位置时,选取共线的三个圆心的像,利用已知的圆心像坐标和靶标实际尺寸,可以计算出相应的圆心坐标。构建多组共线像点,重复计算,得到其他圆心坐标。考虑到误差,这些点通常不会位于同一平面,所以需要拟合一个平面方程来确定靶标平面。然后,在靶标上建立坐标系,通过坐标变换找到每个相机光心在靶标坐标系中的位置。
最终,通过两个相机在相同靶标坐标系下的位置,可以推算出它们之间的相对位置。文章还讨论了模型的优缺点、可能的改进方案以及相机标定在实际应用中的前景,如机器人导航、自动驾驶和3D重建等领域。
这篇文章除了介绍数码相机的成像原理和定位方法外,还提供了具体的程序代码,用于计算靶标圆心的坐标和相机之间的相对位置。这种方法对于计算机视觉和机器人学等领域的研究和实践具有重要意义。
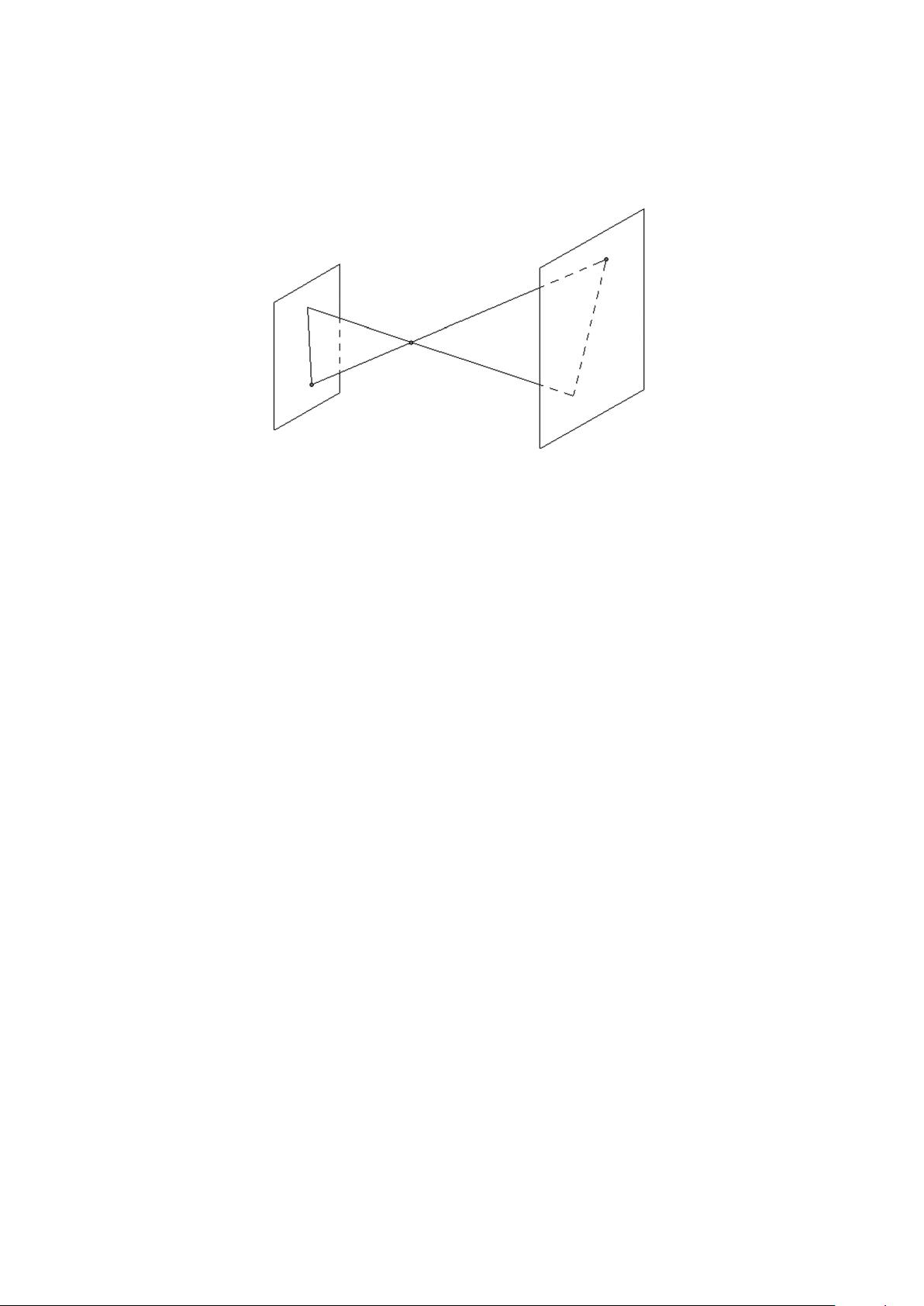
图 5: 数码相机成像原理简化图
2.3 问题 2 的分析
问题 2 是问题 1 建立的数学模型和方法的应用。
2.4 问题 3 的分析
采用实际实验的检验方法,验证模型的准确性。最后通过不同角度的拍摄,分
析模型的稳定性。
2.5 问题 4 的分析
通过问题2的答案,即五个圆心像的位置,通过立 体几何计算出单个 相机相对
于靶标的空间位置,进一步确定两相机之间的相对位置。
§3 符号约定
A,B,C,D,E 靶标上的圆,从左上角顺时针方向标记。
A’,B’,C’,D’,E’ 对应靶标像上的椭圆
O 光心
O
1
光心在靶标像上的投影,即像的中心。
O
A
, O
B
, O
C
, O
D
, O
E
各个靶标的圆心。
O
0
A
, O
0
B
, O
0
C
, O
0
D
, O
0
E
各个靶标圆心的像。
7
剩余37页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2007-12-05 上传
2024-04-17 上传
点击了解资源详情
点击了解资源详情
2024-12-19 上传

QQ030201
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elasticsearch核心改进:实现Translog与索引线程分离
- 分享个人Vim与Git配置文件管理经验
- 文本动画新体验:textillate插件功能介绍
- Python图像处理库Pillow 2.5.2版本发布
- DeepClassifier:简化文本分类任务的深度学习库
- Java领域恩舒技术深度解析
- 渲染jquery-mentions的markdown-it-jquery-mention插件
- CompbuildREDUX:探索Minecraft的现实主义纹理包
- Nest框架的入门教程与部署指南
- Slack黑暗主题脚本教程:简易安装指南
- JavaScript开发进阶:探索develop-it-master项目
- SafeStbImageSharp:提升安全性与代码重构的图像处理库
- Python图像处理库Pillow 2.5.0版本发布
- mytest仓库功能测试与HTML实践
- MATLAB与Python对比分析——cw-09-jareod源代码探究
- KeyGenerator工具:自动化部署节点密钥生成
