CAPG-IMU姿态数据错误分析:坐标轴与旋转问题
需积分: 0 99 浏览量
更新于2024-08-04
收藏 430KB DOCX 举报
"CAPG-IMU硬件设备在输出姿态数据时遇到了问题,涉及到坐标系的定义、变换以及旋转向量的表示。问题的核心在于设备姿态的计算过程中可能存在坐标轴的反转或置换,导致最终的四元数表示与原始的信电系坐标系不一致。在分析过程中,张琛根据静态acc值推测出机身坐标系为右手系,并进行了xyz三轴的旋转实验,但得出的轴角值引发了对 zsens 坐标系正确性的质疑。"
在IT行业中,惯性测量单元(IMU)是一种常见的传感器设备,用于检测物体的加速度和旋转。CAPG-IMU硬件设备在这种背景下,输出的数据可能涉及到两个不同的坐标系:信电系坐标系和zsens坐标系。这两个坐标系之间的转换可能存在复杂性,特别是当转换规则未明确定义时,可能会导致姿态数据的混乱。
问题的关键在于 zsens 输出的旋转向量是以设备开始采集时的第一帧机身坐标系为参考的,而不是固定不变的地球坐标系,比如NED(North-East-Down)或ENU(East-North-Up)。这意味着,要理解这些数据,必须清楚设备自身的坐标系定义,以及如何将其转换到其他坐标系。
张琛通过静态acc值分析,推断出设备的坐标系为右手系,并进行了一系列单轴旋转实验。在实验中,他将设备按图1的XYZ轴定义进行旋转,然后将四元数表示的旋转向量转换为轴角表示。然而,根据轴角值,他发现 zsens 坐标系的X和Y轴可能与信电系坐标系发生了置换,同时无论假设新的坐标系是右手系还是左手系,Z轴的轴角值都与该假设的坐标系定义相矛盾。
这表明在zsens坐标系的定义或姿态计算过程中可能存在错误。如果假设为右手系,那么根据轴角值,Z轴应该指向下方,与右手系的定义不符。同样,如果假设为左手系,Z轴的定义也与左手系的规则矛盾。因此,张琛认为zsens求解的设备姿态可能存在错误。
解决这个问题需要深入理解坐标系的转换规则,重新检查姿态计算过程,确保坐标轴的定义、旋转顺序和方向的一致性。此外,还需要清晰的文档记录,以便在后续数据分析中避免类似混淆。对于开发者而言,理解和处理不同坐标系之间的转换是处理IMU数据时不可或缺的技能,同时也强调了文档和标准化的重要性。
CAPG-IMU 硬件设备输出姿态数据问题
问题描述:
1. 杜宇提示:存在两个坐标系,a. 信电系坐标系; b. zsens(@李启雷)坐标系。
李启雷-杜宇在计算设备姿态(rotation vector)时,进行了某种变换(没有文档,杜宇
记不清了),变换可能包括:坐标轴取反、轴置换操作,导致坐标系定义改变,可能变
为左手系。在直接输出的旋转向量四元数表达中,坐标系定义(轴方向、以及左右手系)
不同于原始的信电系坐标系。
2. zsens 系统输出的旋转向量四元数表示,是以系统开始采集时的第一帧机身坐标系为参
考系的,并非地球 NED(or ENU)坐标系,但是这并不影响 AX=XB 问题求解。AX=XB 问
题的目的就在于,不需要测量两个观测系统的参考系之间的相对旋转,直接通过 A, B 两
组观测值,求解 A, B 之间的转换关系。
3. 张琛验证结果:
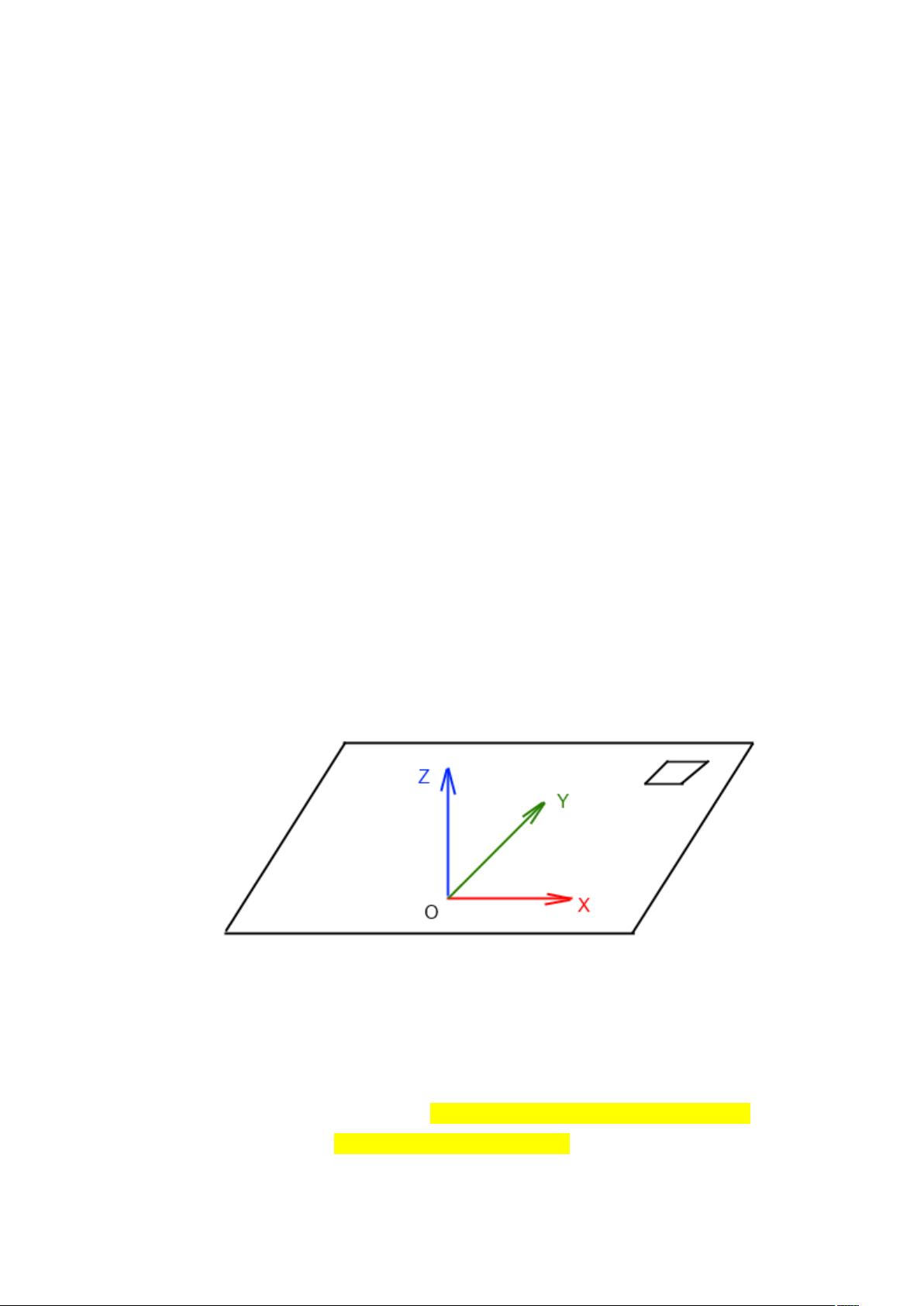
① 根据静态 acc 值,推测机身坐标系如图 1 所示,是右手系。
图 1 信电系 IMU sdk 右手坐标系定义
右上角方块为设备开关按钮。
② 将设备按照图 1 三轴定义,对于测试数据 CaptureSession-checkaxes.ynorth.xml,其
初始姿态:图 1 的 Y 轴指向地磁北极,Z 轴竖直向上。
下载后可阅读完整内容,剩余4页未读,立即下载
198 浏览量
2022-08-08 上传
2021-03-30 上传
2021-02-15 上传
101 浏览量
2021-03-31 上传
2021-03-22 上传
2021-09-30 上传
109 浏览量

朱王勇
- 粉丝: 30
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#高效多线程下载器组件源码V1.12发布
- 32位Windows汇编语言程序设计大全
- Sketch插件库替换器:简化库更换流程
- 首版投资组合网站的开发与部署指南
- C语言实现农历与阳历转换的新库发布
- 探索Linux下的Vim优雅配色方案:Colibri.vim
- STM32 TFT显示技术与刷屏方法解析
- STM32单片机控制交通灯毕设资料整合
- Vitamio实现后台Service播放m3u8音频流
- 使用Docker封装的Alpine版Vim体验
- 步步高高级版WarNards开源项目发布
- 使用JNI实现Java调用VC6 DLL与Linux SO的DEMO教程
- STM32与OLED显示技术的实践应用
- 全面技术覆盖的小区物业管理系统设计与源码
- 清华版编译原理专业课答案解析
- Linux系统下nginx添加SSL配置的详细步骤
