树莓派安装Ubuntu18.04 Server+Desktop+ROS1详细教程
版权申诉
"树莓派raspberry安装ubuntu18.04 server + desktop + ros1"
这篇文章主要介绍了如何在树莓派Raspberry Pi上安装Ubuntu 18.04 Server,并且添加桌面环境以及ROS (Robot Operating System) Noetic Melodic。首先,作者提到了在Debian版本的ROS1中遇到的不便,因此选择了Ubuntu作为替代。
1. 安装Ubuntu Server
- 在开始安装前,你需要一个至少4GB,推荐8GB的microSD卡。
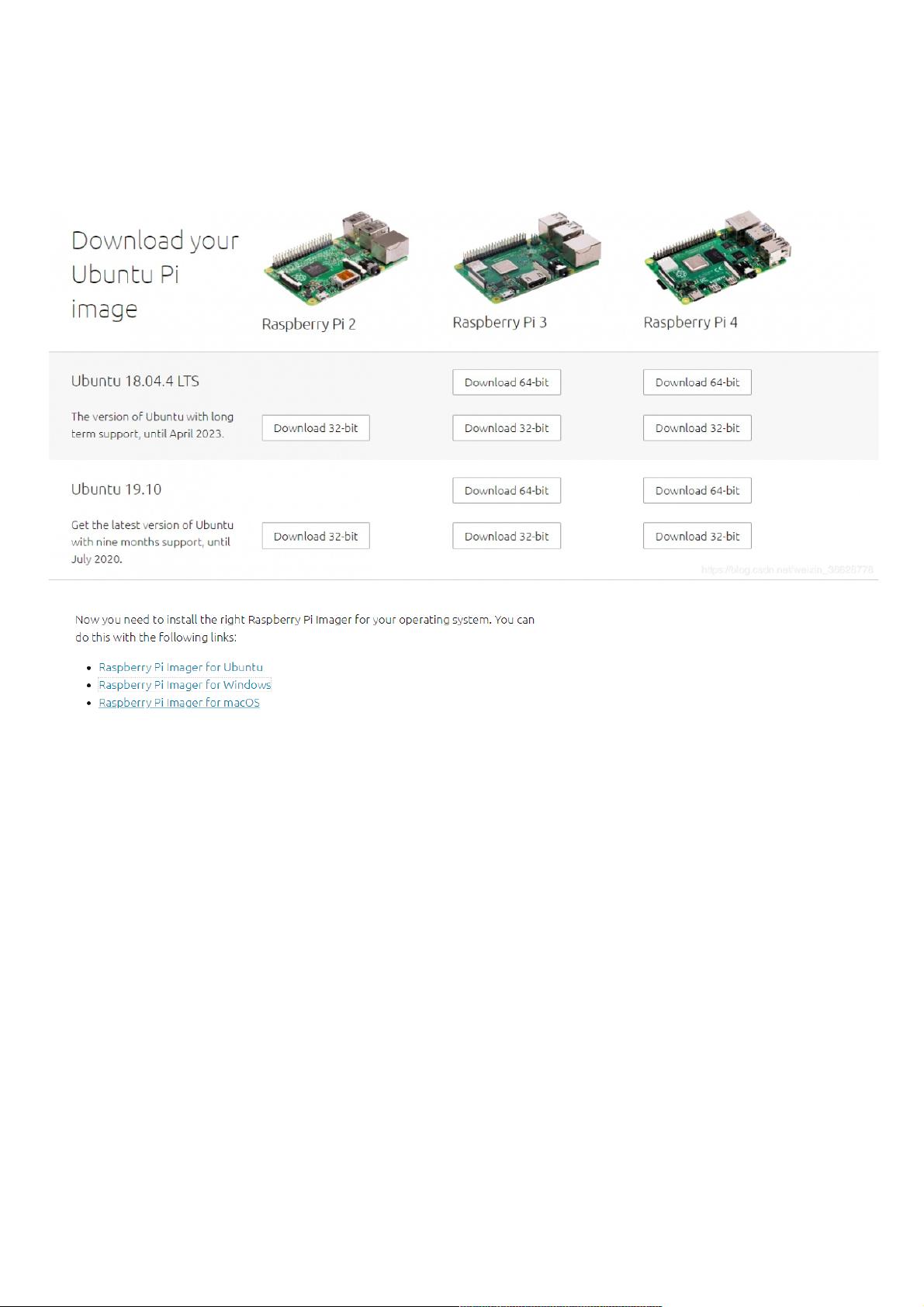
- Ubuntu Server 18.04的官方下载链接可以在Ubuntu官网找到。
- 使用Raspberry Pi Imager工具来创建可启动的Ubuntu Server microSD卡。这个工具适用于Windows、Ubuntu和macOS。
2. 处理安装过程中可能出现的错误
- 如果遇到问题,如文件名包含中文导致的错误,建议使用全英文路径进行操作。
- 对于SD卡读写问题,可能需要尝试插拔SD卡或更换新的镜像文件。
3. 配置网络
- 修改启动文件以确保网络连接。
- 在启动后,配置Wi-Fi连接,这允许树莓派连接到互联网。
4. 启动与配置
- 第一次启动时,需要进行基础配置。
- 通过SSH(Secure Shell)连接到树莓派,以实现远程管理。
5. 安装桌面环境
- 为了在Ubuntu Server上使用图形界面,需要安装桌面环境。
6. 安装ROS1
- 添加ROS的软件源列表。
- 添加ROS的公钥,以验证软件包的来源。
- 执行安装命令来安装ROS。
- 初始化rosdep,这是一个工具,用于解决ROS依赖关系。
- 设置ROS环境变量,确保所有必要的路径都已正确设置。
- 最后,进行简单的测试以确认ROS已经成功安装并可以运行。
整个过程按照官方指南进行,确保所有步骤都按顺序执行,以避免出现错误。通过这样的配置,用户能够在树莓派上拥有一个功能完备的开发环境,包括服务器功能、桌面环境以及用于机器人控制和开发的ROS系统。这对于教育、研究或个人项目来说是非常有用的。
树莓派树莓派raspberry 安装安装ubuntu18.04 server + desktop + ros1
文章目录文章目录0. 前言1.概述2.准备SD卡2.1 插sd卡2.2 下载Raspberry Pi Imager 并安装2.3 错误处理2.3.1 报错了,猜应该是中文名字的问题,神`迅雷下载`,放到全英文路径下2.3.2 遇到
这个问题,插拔下sd卡2.3.3 然后一直失败,查了不到原因,最后猜是文件有问题,重新下载一个2.4 用新的包试下3.配置网络3.1 改启动文件3.2 启动之后配置wifi4.启动4.1 第一次配
置4.2 ssh连接5.安装桌面6.装ros16.1 添加 sources.list6.2 添加公钥6.3 安装6.4 初始化 rosdep6.5 设置环境变量6.6 测试
0. 前言前言
debian 版本的ros1 有诸多不便,所以装个ubuntu 出来
ubuntu 安装介绍网站https://ubuntu.com/tutorials/how-to-install-ubuntu-on-your-raspberry-pi#1-overview
树莓派 ubuntu server 18.04 下载地址https://ubuntu.com/download/raspberry-pi
使用Raspberry Pi Imager for Windows 制作镜像,这个好像更方便点
不用纠结操作系统
下面安装官方的顺序来
1.概述概述
您将学到什么您将学到什么
如何创建可启动的Ubuntu Server microSD卡
如何在Raspberry Pi上设置Internet连接
如何远程访问您的Raspberry Pi
你需要什么你需要什么
microSD卡(最小4GB,建议8GB)
Raspberry Pi的Ubuntu服务器映像
带有microSD卡驱动器的计算机
Raspberry Pi 2、3或4
微型USB电源线(用于Pi 4的USB-C)
具有Internet连接的Wi-Fi网络或以太网电缆
并可选:并可选:
带有HDMI接口的显示器
Pi 2和3的HDMI电缆以及Pi 4的微型HDMI电缆
USB键盘
谷歌翻译厉害
2.准备准备SD卡卡
2.1 插插sd卡卡
2.2 下载下载Raspberry Pi Imager 并安装并安装
地址:地址:
适用于Ubuntu的Raspberry Pi Imager
适用于Windows的Raspberry Pi Imager
适用于macOS的Raspberry Pi Imager
下载后可阅读完整内容,剩余6页未读,立即下载
2020-06-01 上传
2020-04-30 上传
2023-08-25 上传
2023-05-24 上传
2023-03-17 上传
2023-08-27 上传
2023-08-23 上传
2023-08-30 上传

weixin_38685832
- 粉丝: 4
- 资源: 972
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
