UR5机器人图纸(3.0.5.2版)结构与内容概览
需积分: 10 124 浏览量
更新于2024-07-09
收藏 258KB PDF 举报
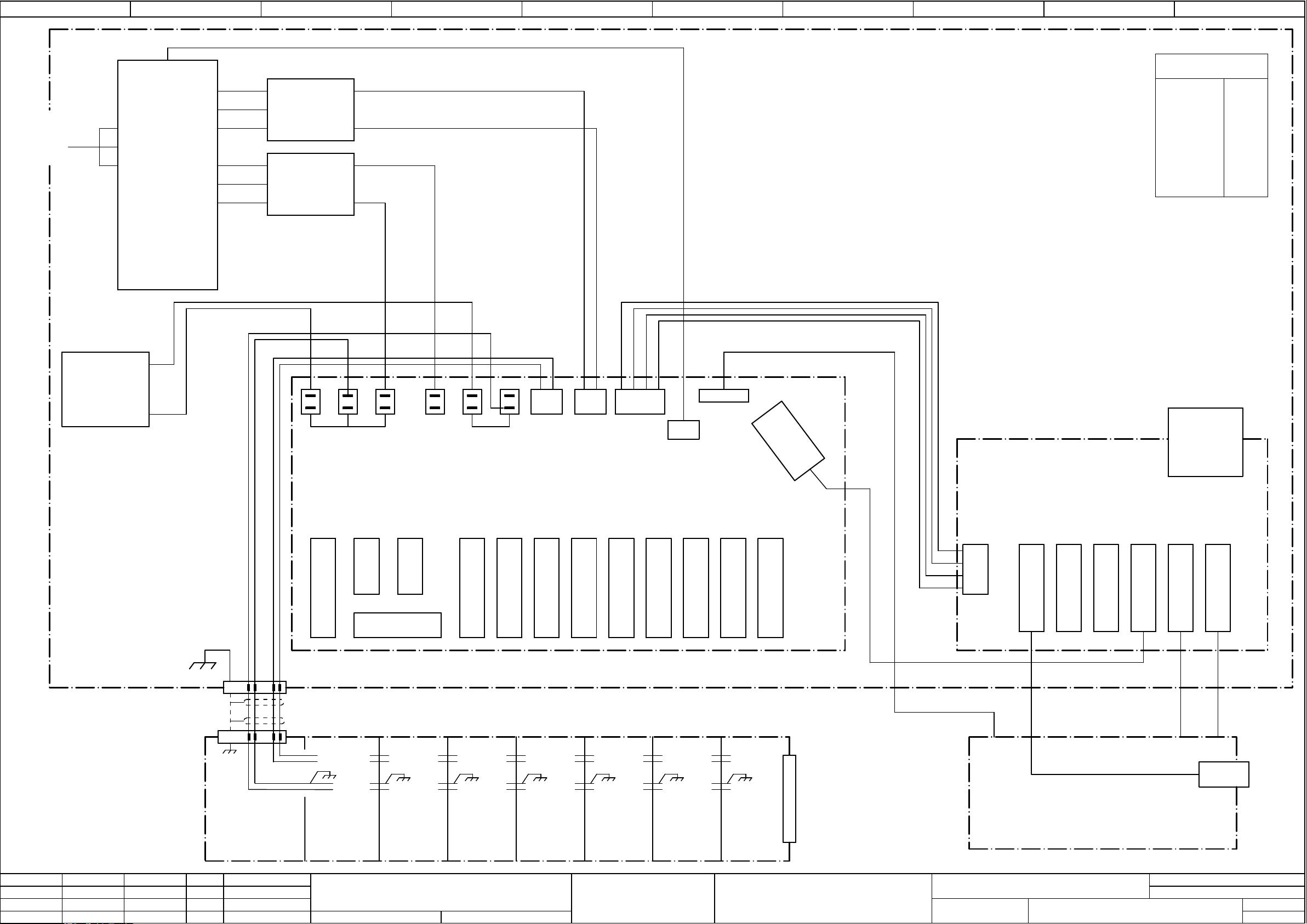
UR5_schematic_drawings_rev3.0.5.2.pdf 是一份由Universal Robots公司发布的图纸,包含了UR5系列机器人的详细设计图纸和相关信息。UR5是一款先进的六轴工业机器人,专为协作和灵活的生产环境设计,具备高精度、高性能和易用性。
这份文档的结构清晰,包括以下几个部分:
1. **项目首页** (ProjectFrontPage): 提供了文档的概述,日期为2015年2月12日,可能包含了项目的启动日期和设计团队的名称。
2. **目录索引** (TableofContents/index): 是一个页面列表,用于快速查找文档中的各个章节,方便用户查阅具体的技术细节,如控制器型号(UR5-CB3.0和UR5-CB3.1)、机器人臂设计(RobotarmUR5)以及输入输出接口(UR5ControllerI/O)等。
3. **概述** (OverviewUR5) 和 **控制器介绍** (ControllerUR5-CB3.0 and ControllerUR5-CB3.1): 这些章节可能详细解释了UR5的总体设计目标、功能特性以及不同版本控制器的特点,对于理解和操作机器人至关重要。
4. **机器人臂** (RobotarmUR5): 这一部分展示了机器人的机械结构,包括关节、连杆和末端执行器的设计,对于机械工程师和维护人员了解其运动范围和工作原理很有帮助。
5. **输入输出接口** (UR5ControllerI/O): 描述了控制信号的输入和输出方式,这对于编程和集成外部设备至机器人系统时非常有用。
6. **补充页面** (Supplementarypagefield) 可能包含额外的技术参数、安装指南或注意事项,对使用者在实际操作中解决问题有参考价值。
这些图纸版本为3.0.5.2,更新日期为2014年9月25日,由VKV编辑。通过这份文档,用户可以深入了解UR5机器人的内部构造、功能组件以及其操作和维护细节,是UR5用户和开发者必备的技术参考资料。在进行维护、升级或开发应用时,这份图纸提供了重要的设计依据。
Page
Page
Ed.
10
Original
Universal Robots
+
Date
Date
Replaced by
UR5
Controller UR5 - CB3.0
1
Modification
0 76
Appr
Replacement of
8 93
19
12
4
02-12-2015
11
2
=
Name
5
Dwg. No.:
3.0.5.2
Controller UR5CB3.0
100-240 VAC
47-63 Hz
AI/AO
USB
USB
DVI
RS232
Compact
Flash
Card
Motherboard
Touch
USB
Teach Pendant
TCP/IP
TCP/IP
Euromap E67
TCP/IP
DO
DO
DI
DI
Config. DO
Config. DO
Config. DI
Config. DI
24V
ON/OFF
48V
Relay
12V
+
+
GND
GND
12V
GND
GND
+
+
GND
+
12V
RS485
+OUT
48V
GND
48V
PSU
GND
N
L
-V
+V
12V
PSU
GND
N
L
-V
+V
GND
N
L
GND
N
L
GND
N
L
12V PSU 48V PSU1 48V PSU2
L
N
GND
Current Distributor
Safety Control Board
Energy
Eater
GND
+48V
CON
Supply:
+IN
48V
SAFETY
BK
RD
WH
OG
BN
BK
BN
BU
GNYE
BN
BU
GNYE
BN
WH
BN
WH
GN
YE
WH
BN
GND
4 2 3 16
White WH
Green GN
Green/Yellow GNYE
Black BK
Brown BN
Yellow YE
Red RD
Wire colour codes
Orange OG
Blue BU
Robot
RS485
ID=0
Base
Shoulder
Elbow
Wrist 1
Wrist 2
Wrist 3
Tool
ID=1
ID=2
ID=3
ID=4
ID=5
24v
DI/DO
AI
12V
RS485
12V
12V
48V
剩余18页未读,继续阅读
2021-03-13 上传
280 浏览量
782 浏览量
2021-09-28 上传
206 浏览量
429 浏览量
403 浏览量

weixin_39508125
- 粉丝: 0
- 资源: 27
 我的内容管理
展开
我的内容管理
展开







