城市施工区车辆换道行为特征与控制模型研究
版权申诉
148 浏览量
更新于2024-06-19
收藏 4.01MB PDF 举报
该篇毕业论文主要探讨的是城市占道施工区域中车辆换道行为的研究,这是在快速发展的城市交通背景下,面对日益增长的汽车数量和交通压力而提出的重要课题。随着城市化进程的推进,交通拥堵成为普遍问题,通过新建和维护基础设施来提升道路资源利用效率成为了缓解这一问题的关键手段。
研究首先聚焦于城市占道施工区的特性分析,包括道路空间布局、位置、施工方式和时间等因素,对施工区进行分类和概述,以便为后续研究提供明确的背景和环境。车辆换道行为被细分为强制换道和自由换道两种形式,通过对换道过程和影响因素的深入剖析,探讨了这两种换道行为的内在规律。
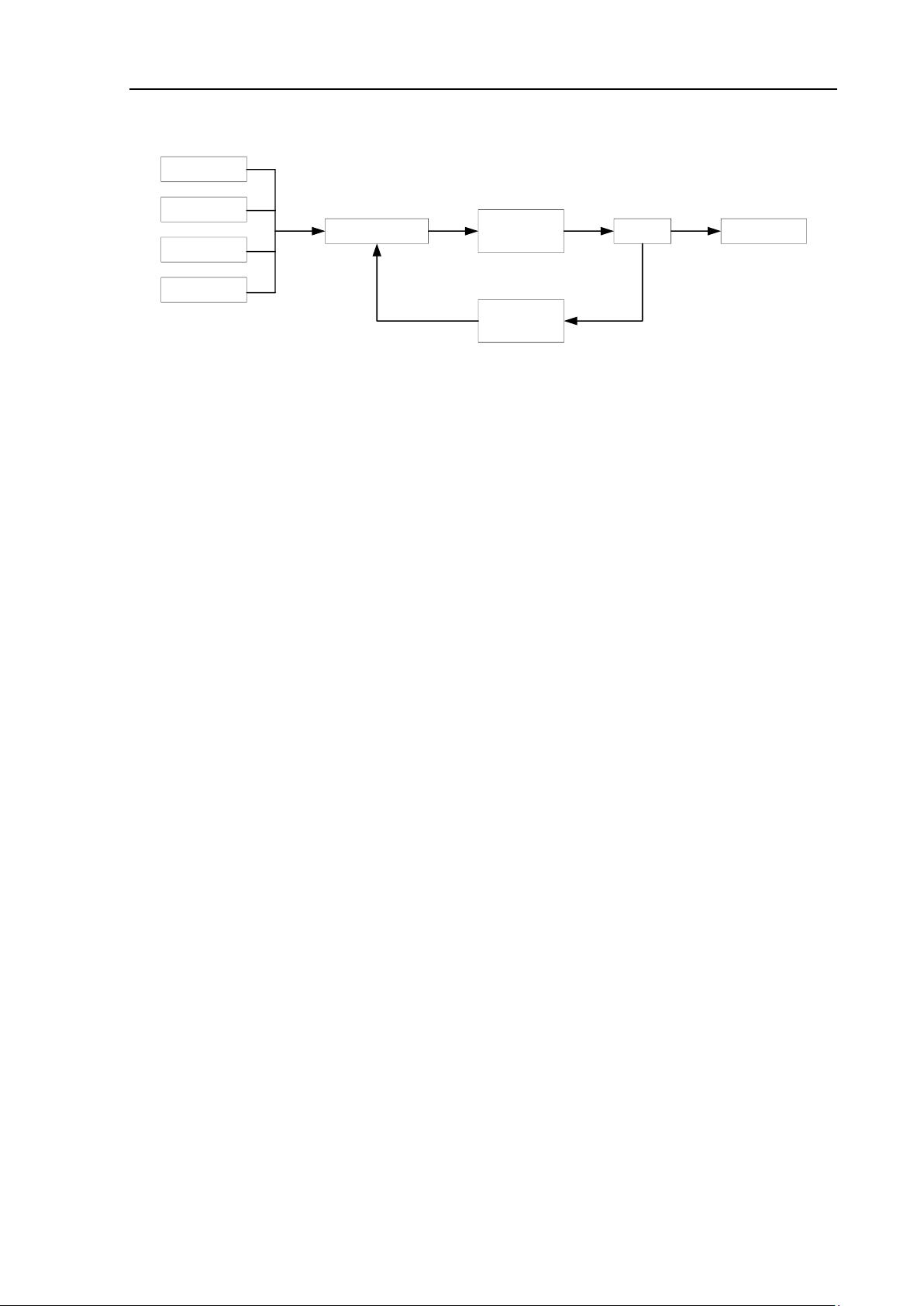
作者通过视频检测技术从宏观层面量化车辆换道特性,并结合驾驶员问卷调查,利用主成分分析和聚类分析方法,识别出不同驾驶员的驾驶风格类型及其比例,从而在微观层面上揭示车辆换道的具体特征。研究进一步应用模糊控制理论,改进了元胞自动机模型,构建了针对强制换道和自由换道的数学模型。这些模型分别考虑了目标车道的换道压力、后车冲突程度(强制换道)、车道行车效益差值和后车距离(自由换道),并通过隶属度函数制定出模糊换道规则。
为了确保模型的仿真效果,论文将模糊控制理论与车辆跟驰模型相结合,并利用MATLAB仿真平台进行模拟。通过与实际交通流量、密度、平均速度和换道次数等数据的对比分析,验证了所建模型的准确性和有效性。这项研究不仅有助于理解城市占道施工区车辆换道行为的复杂性,还为优化城市交通管理策略、预防交通冲突和提升道路安全提供了科学依据。
关键词:城市占道施工区、车辆换道行为、元胞自动机、模糊控制理论、MATLAB仿真技术,都表明了本研究的理论基础和技术路径,是解决城市交通拥堵问题中一个关键环节的深入探究。

第二章 城市占道施工区的车辆换道行为特性
11
第二章 城市占道施工区的车辆换道行为特性
2.1 占道施工区的交通特性
在城市占道施工区中,不同类型的占道施工区在对交通流的影响程度上有所区别,
在道路环境变化、驾驶行为以及车辆运行状态等方面均会形成较大的影响,故有必要系
统地研究城市占道施工区的交通特性。
2.1.1 占道施工区的定义与分类
占道施工(roadwork)是指需要占用市政道路的施工工程、道路养护、设施维修、
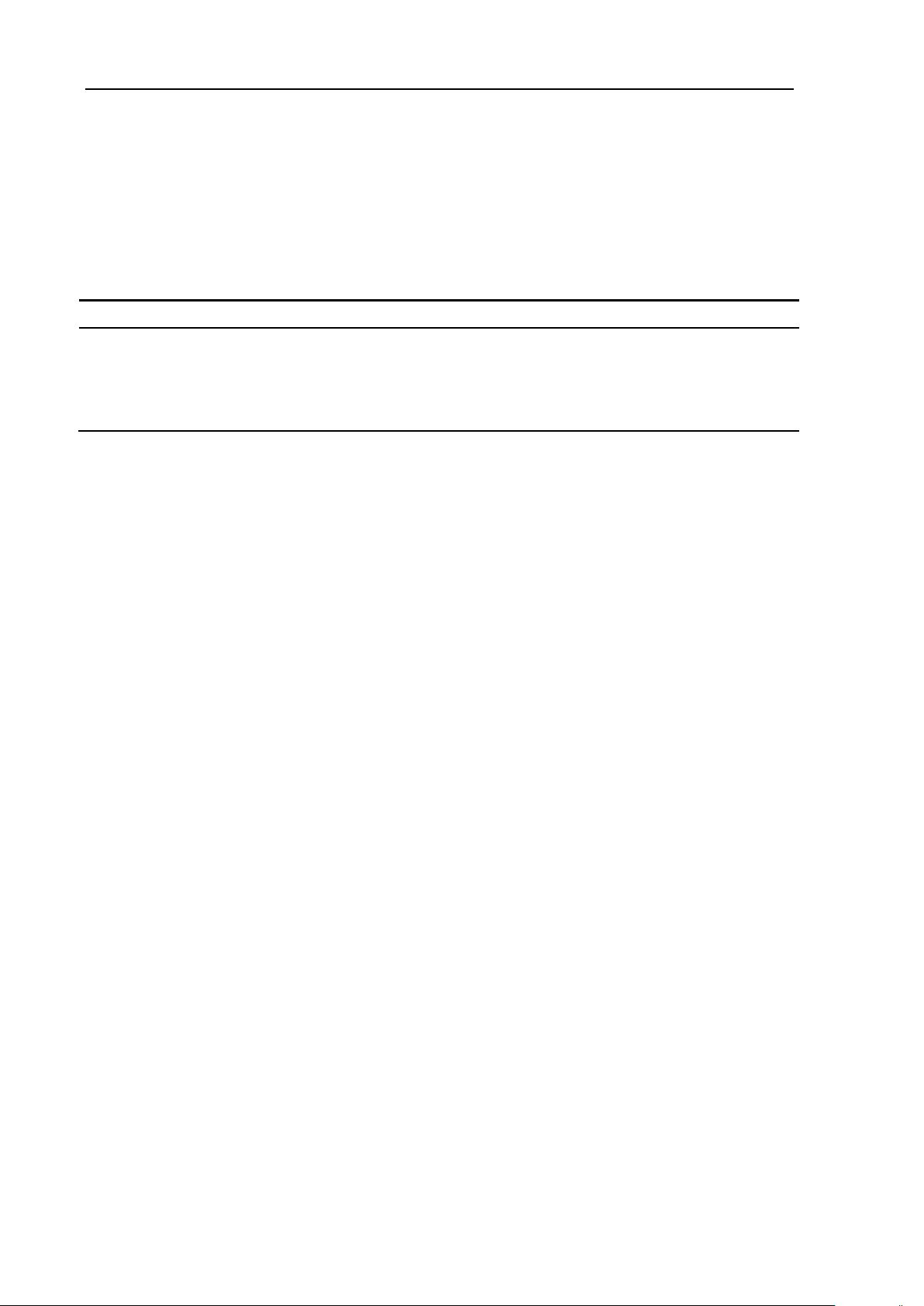
路政管理以及环卫绿化等活动。占道施工区(roadworkzone),是指为了保障现场占道施
工人员、设备、车辆以及周围步行者的交通安全,为保证占道施工安全顺利的进行,采
用安全设施进行围挡的区域
[51]
。
按照施工活动占用道路空间大小来划分,占道施工主要分为两大类,即全封闭施工
围挡和半封闭施工围挡。一般的,全封闭施工围挡方法是指将整幅市政道路采取全部封
闭的一种施工方法,禁止车辆和行人通行,以达到道路设施集中施工的目的;半封闭施
工围挡的方法是根据实际道路施工的情况,通过对道路采取分段或者分方向的施工,该
方法虽影响道路通行能力,相比全封闭施工围挡,能够保证车辆行驶方向不变,减少绕
行距离。一般的,结合实际施工条件,半封闭施工围挡又可以分为对一侧道路进行围挡
和对一侧部分道路进行围挡两种情况,由于施工和车辆运行同时存在,半封闭施工围挡
对交通组织的影响往往最复杂,其中,对一侧道路进行围挡是将道路的一侧完全封闭,
进行交通管制,道路的另一侧仍正常通行车辆;对一侧部分道路进行围挡是指将道路的
一侧设置围挡等交通渠化方式,该侧道路车道缩减,另一侧仍可以正常通行车辆。
按照施工活动的位置,可分为平面交叉口、路段和特殊区域处(隧道、城市立交)
三种类型,其中,平面交叉口本身作为交通流的集散节点,机动车、非机动车和行人之
间的交通冲突明显,占道施工使得该处车辆通行空间受限,减小了车辆的车头间距,降
低通行能力,同时增加混合交通流之间的冲突;占道施工区位于城市路段时,由于车道
的缩减等道路特征,导致各车道的交通密度增大,影响通行能力,增加了车辆的排队延
误;位于城市隧道、立交桥下的占道施工区,考虑到交通安全性,交通组织更为复杂,
增大了施工难度。
剩余98页未读,继续阅读
2019-09-11 上传
2023-03-19 上传
2021-10-02 上传
2021-09-26 上传
2023-08-16 上传
2021-08-29 上传
2021-08-19 上传


xox_761617
- 粉丝: 25
- 资源: 7802
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
