智能车模:单片机驱动的平衡与控制策略
版权申诉
29 浏览量
更新于2024-06-21
收藏 1.99MB DOCX 举报
该文档主要介绍了单片机课程设计中的平衡小车项目,着重于两轮自平衡智能车的设计与控制。以下是关键知识点的详细解析:
1. 智能车系统架构:
智能车基于车模结构,采用MC9S12XS128单片机作为核心处理器,负责收集来自传感器的数据,通过算法处理和分析,然后驱动电机执行相应的动作。系统主要包括硬件结构框架,如车体框架、传感器模块和电机控制模块。
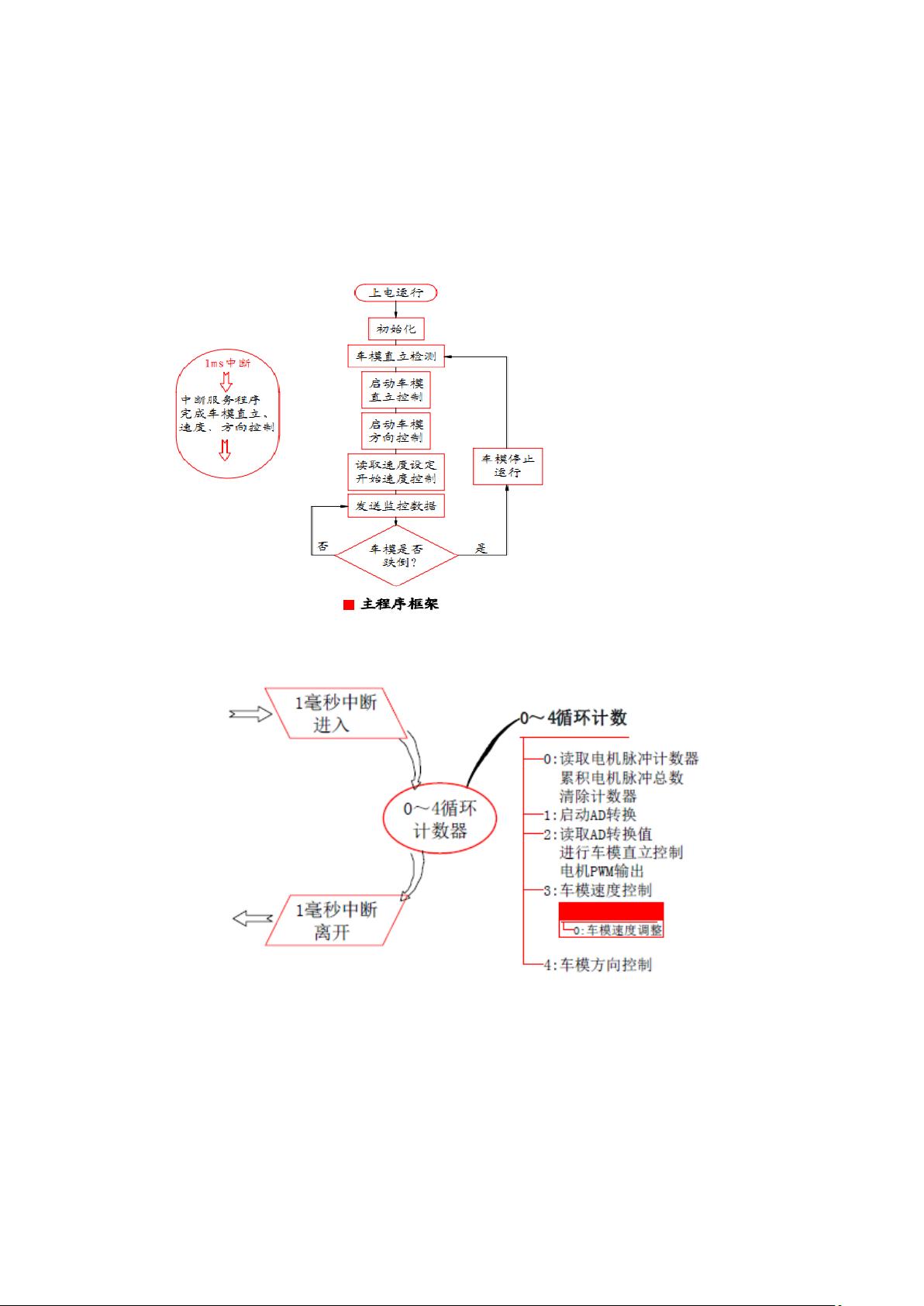
2. 直立行走任务分解:
电磁组比赛中的直立行走要求车模在两个后轮支撑下运行,这增加了控制复杂性。将任务分解为三个基本任务:保持车模直立、控制速度和转向。直立控制是最基础的任务,因为它需要克服其他控制带来的干扰,例如电机转速和转向控制可能会导致车模倾斜。
3. 电机控制:
通过虚拟化两个后轮的直流电机,将其视为具有不同功能的独立驱动器,分别对应直立平衡、前进速度和转向。控制这些电机的电压可以实现对应的控制目标,如通过调整电机电压来控制车模的速度和转向。
4. 干扰管理:
在实际操作中,要确保各控制任务之间的协调,避免对直立控制造成过大干扰。例如,在改变速度或转向时,需要尽可能平滑操作,减少车模倾倒的风险。
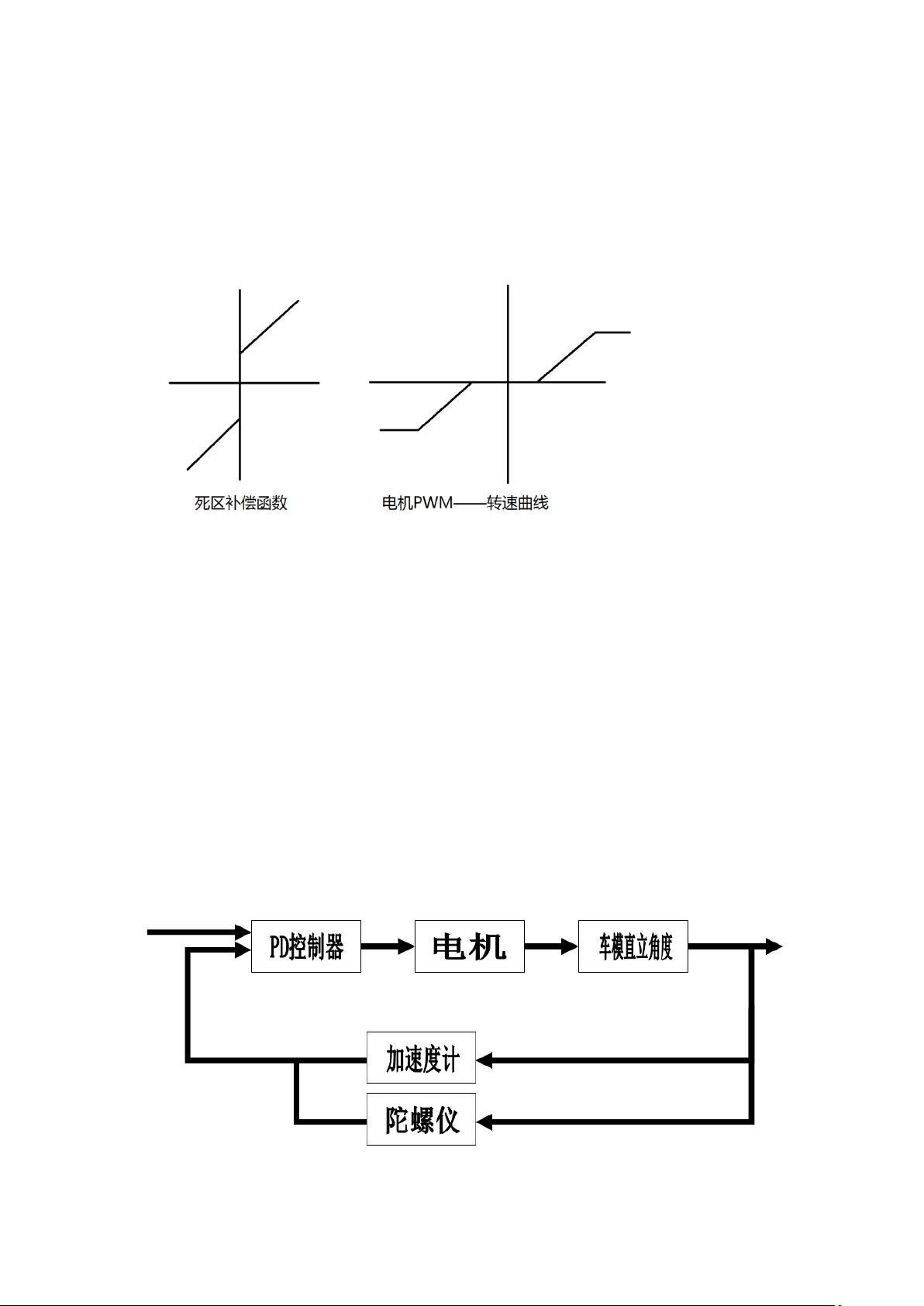
5. 车模直立控制:
直立控制的关键在于模仿杂技表演中的平衡技巧,通过调整电机电压和保持视觉反馈(即观察车模倾斜角度),实现动态调整车模的重心,以保持直立状态。
6. 控制系统的稳定性:
控制系统假设每个控制任务都能独立稳定工作,但在实际操作中,它们需要互相配合,以实现整体的平稳和高效行驶。
整个项目强调了理论与实践相结合,不仅涉及单片机编程、传感器应用、电机控制原理,还包含系统设计和问题解决策略,是单片机课程设计中一个富有挑战且深入理解电机控制和动态平衡控制的实践项目。

11
这样便可以控制车模保持直立状态。车模运行速度调整时间相对很长,此时,电
机速度与施加在其上的电压成正比。通过传统的PID反馈控制,便可以精确控制
电机的运行速度,从而控制车模的运行速度。
1.5 车模方向控制
略
剩余61页未读,继续阅读
2023-12-22 上传
2022-06-25 上传
2023-06-10 上传
2023-02-24 上传
2023-05-30 上传
2023-05-31 上传
2023-05-31 上传
2023-09-04 上传

omyligaga
- 粉丝: 73
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
