模糊神经网络PID设计:原理、应用与优缺点探讨
版权申诉
32 浏览量
更新于2024-06-19
收藏 937KB PDF 举报
模糊神经网络PID设计方法是一种结合了传统PID控制、模糊控制和神经网络技术的先进控制器设计策略。该方法旨在优化控制性能并弥补传统PID控制可能存在的局限性。以下是该设计方法的关键知识点:
1. **传统PID控制**:
- PID(比例-积分-微分)控制器是工业自动化中最常见的控制算法。它依据给定值(r(t))与实际输出值(y(t))之间的偏差进行控制,由比例、积分和微分三个环节组成。PID控制器的特点是简单易用,但可能对系统参数敏感,且在处理非线性系统时效果有限。
2. **模糊控制原理**:
- 模糊控制利用模糊集合理论,模糊语言变量和模糊逻辑推理,提供了一种非精确但灵活的决策方式。它能处理不确定性,并适应环境变化,具有较强的鲁棒性。模糊控制通过模糊化偏差信号,利用模糊语言表示并进行推理,从而制定控制决策。
3. **神经网络控制**:
- 神经网络是模仿人脑神经元结构的计算模型,通过学习过程优化控制策略。它可以处理复杂的非线性关系,具有自适应性和学习能力,对于处理动态系统有优势。将神经网络与PID结合,可以提高控制精度和响应速度。
4. **参数整定**:
- Ziegler-Nichols法则是一种常用的PID参数整定方法,基于临界增益和周期来确定比例、积分和微分系数。这种方法简单实用,但可能不适用于所有系统,需要针对具体情况进行调整。
5. **模糊PID控制器**:
- 将模糊逻辑融入PID,形成模糊PID控制器,旨在融合模糊控制的灵活性和PID的精确性。这种混合方法可以改善PID对不确定性和非线性的处理,同时保持一定的稳定性。
6. **实验设计**:
- 实验内容包括调整PID参数以观察其对系统性能的影响,使用Ziegler-Nichols法则进行参数整定,设计模糊PID控制器,以及结合神经网络的模糊控制策略,旨在综合提升控制系统的性能。
7. **控制器设计过程**:
- 设计步骤包括:比较不同PID参数的效果,采用模糊化技术处理偏差信号,利用模糊控制规则进行推理,以及选择合适的方式将神经网络与模糊控制集成。
模糊神经网络PID设计方法通过集成多种控制技术,提供了更高效、适应性强的解决方案,尤其适合处理复杂和动态的控制任务,但同时也需要考虑其设计的复杂性和对参数调优的需求。
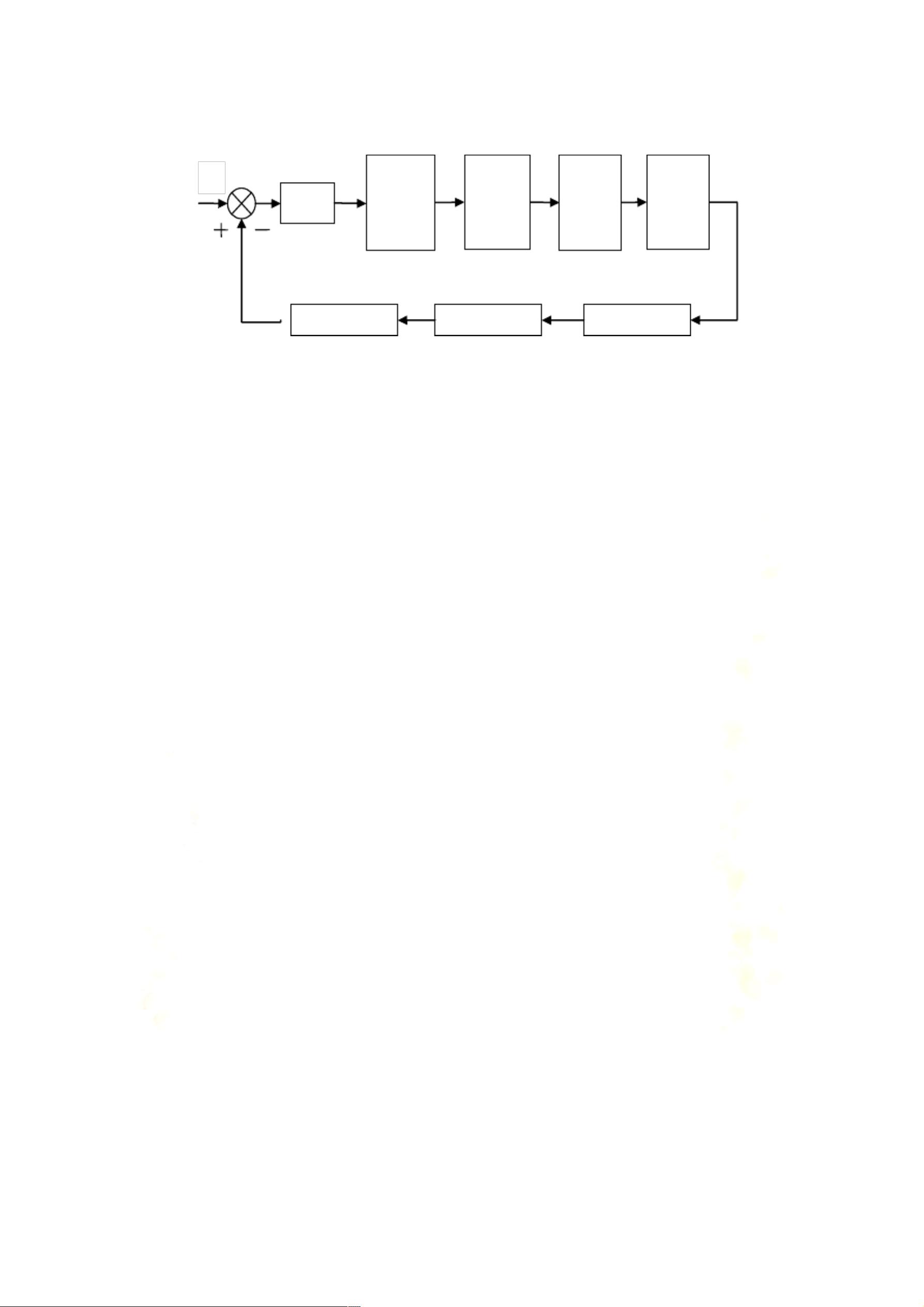
图 3-2 模糊控制原理图
自适应模糊 PID 控制器是采用一个两输入、
三输出的模糊控制器,以偏差 e 和偏差变化
ec 作为模糊控制器的输入,利用模糊控制规
则在线对 PID 参数进行修改, 并以 PID 参数的
修正量 (△ Kp, △ Ti, △ Td)为输出, 以满足不
同时刻偏差和偏差变化对 PID 参数整定的要
求。
A
模
糊
模
糊
模
糊
模
糊
传感 被控 执 行
r
剩余19页未读,继续阅读
2021-09-26 上传
207 浏览量
2021-09-25 上传
2021-09-27 上传
2021-09-26 上传
2021-09-26 上传

a66889999
- 粉丝: 44
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







