异步设计方法论:一种概述
需积分: 9 33 浏览量
更新于2024-07-16
收藏 2.56MB PDF 举报
"异步设计方法学:概述"
在计算机硬件设计领域,异步设计是一种非传统的技术,自20世纪50年代中期以来就一直受到研究者的关注,但尚未被广泛采用。异步设计的核心理念是打破同步系统中普遍存在的二进制信号和离散时间假设,从而可能实现更高效、更灵活的电路设计。本文将探讨异步计算的优势与挑战,并介绍几种重要的异步设计方法。
一、简介
传统逻辑设计主要基于两个关键假设:所有信号都是二进制的,且时间是离散的。这些假设使得逻辑设计变得简单,可以使用布尔逻辑来描述和处理逻辑结构,同时通过假设时间的离散性,可以避免许多潜在的危险和反馈问题。然而,异步设计的目标是在不依赖这些简化假设的情况下工作,这有可能带来更优的设计结果。
二、异步设计的优势
1. **效率提升**:异步设计允许各部分电路根据自身的时序独立工作,而不是被全局时钟强制同步,因此可以减少不必要的等待时间,提高速度和能效。
2. **可扩展性**:由于没有全局时钟,异步设计在大规模集成电路中更易于扩展,降低了时钟树的布线复杂性和延迟。
3. **抗噪声能力**:异步设计中的电路对时钟抖动和电源波动的敏感度较低,因此具有更好的抗噪声性能。
4. **动态适应性**:异步电路能够根据其组件的不同速度和条件动态调整,这在处理工艺变化和温度波动时尤其有用。
三、异步设计方法
1. **霍夫曼(Hufian)异步电路**:霍夫曼电路是早期的异步设计方法之一,它使用比较器和仲裁器来决定电路的行为,以确保正确性和避免竞争冒险。
2. **突发模式电路**:这种设计方式适用于需要快速响应突发事件的场景,电路能在短时间内快速启动并完成任务,然后进入低功耗状态。
3. **微管道(Micropipelines)**:微管道是一种将任务分解为小单元,每个单元独立执行的异步方法,允许流水线在不同阶段同时进行。
4. **模板基和轨迹理论基的延迟不敏感电路**:这些设计方法利用特定的结构和规则,使电路对信号传输延迟不敏感,从而提高系统的鲁棒性。
5. **信号转换图(Signal Transition Graphs, STGs)**:STGs提供了一种形式化的方法来描述和分析异步电路的行为,帮助设计者理解和优化电路。
6. **变化图(Change Diagrams)**:变化图是另一种描述异步电路行为的图形工具,用于捕捉和解决异步系统中的竞争条件。
7. **基于编译的准延迟不敏感电路**:这种方法结合了编译技术和异步设计,通过编译器优化实现延迟不敏感,降低设计的复杂性。
四、挑战
尽管异步设计有诸多优点,但也面临着一些挑战,如设计复杂性增加、验证难度提高以及缺乏成熟的工具支持。此外,异步电路的互操作性问题也需要解决,以确保它们能够与现有的同步系统无缝集成。
总结来说,异步设计方法学为克服传统同步设计的限制提供了新的思路,尽管目前仍面临一些实际应用的障碍,但随着技术的进步和研究的深入,异步设计有望在未来发挥更大的作用。
Local
CLOCK
I1
--.)
I1
--.)
I2
-
-D
01
I2
+
02
I1
-
I2-
-h
I1
+’
I2
.--)
-
I1
-
II
k
I
+
+
w
I
r
s2
17
PhaSe-1
Phase-27
Dynamic
static
Latches
Latches
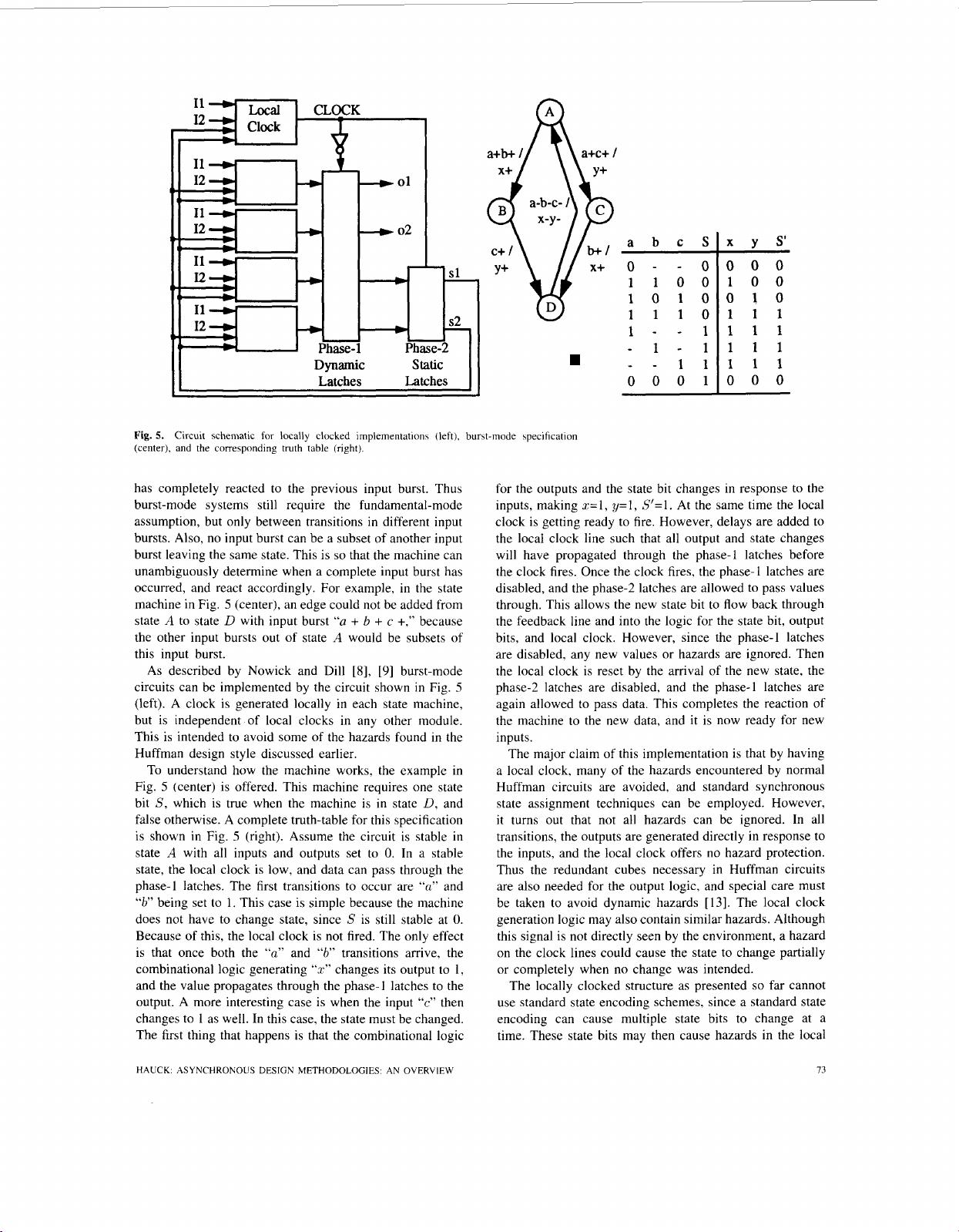
Fig.
5.
Circuit schematic
for
locally
clocked implementations (left), burst-mode specification
(center),
and
the corresponding truth table (right).
has completely reacted to the previous input burst. Thus
burst-mode systems still require the fundamental-mode
assumption, but only between transitions in different input
bursts. Also, no input burst can be
a
subset of another input
burst leaving the same state. This is
so
that the machine can
unambiguously determine when
a
complete input burst has
occurred, and react accordingly. For example, in the state
machine in Fig.
5
(center), an edge could not be added from
state
A
to state
D
with input burst
“a
+
b
+
c
+,”
because
the other input bursts out of state
A
would be subsets of
this input burst.
As described by Nowick and Dill
[8],
[9]
burst-mode
circuits can be implemented by the circuit shown in Fig.
5
(left).
A
clock is generated locally in each state machine,
but is independent of local clocks in any other module.
This is intended to avoid some of the hazards found in the
Huffman design style discussed earlier.
To understand how the machine works, the example in
Fig.
5
(center) is offered. This machine requires one state
bit
S,
which is true when the machine is in state
D,
and
false otherwise. A complete truth-table for this specification
is shown
in
Fig.
5
(right). Assume the circuit is stable in
state
A
with all inputs and outputs set to
0.
In a stable
state, the local clock is low, and data can pass through the
phase-1 latches. The first transitions to occur are
“a”
and
“b”
being set to
1.
This case is simple because the machine
does not have to change state, since
S
is still stable at
0.
Because of this, the local clock is not fired. The only effect
is that once both the
“a”
and
“b”
transitions arrive, the
combinational logic generating
“z”
changes its output to
1,
and the value propagates through the phase-1 latches to the
output.
A
more interesting case is when the input
“c”
then
changes to
1
as
well. In this case, the state must be changed.
The first thing that happens is that the combinational logic
abcS
~ ~~
0--0
1100
1010
1110
1--1
-1-1
--
11
0001
for the outputs and the state bit changes in response to the
inputs, making
x=
1,
y=l
,
S’=l
.
At the same time the local
clock is getting ready to fire. However, delays are added to
the local clock line such that
all
output and state changes
will have propagated through the phase-
1
latches before
the clock fires. Once the clock fires, the phase-
1
latches are
disabled, and the phase-2 latches are allowed to pass values
through. This allows the new state bit to flow back through
the feedback line and into the logic for the state bit, output
bits, and local clock. However, since the phase-1 latches
are disabled, any new values or hazards are ignored. Then
the local clock is reset by the arrival of the new state, the
phase-2 latches are disabled, and the phase-I latches are
again allowed to pass data. This completes the reaction of
the machine to the new data, and it is now ready for new
inputs.
The major claim of this implementation is that by having
a
local clock, many of the hazards encountered by normal
Huffman circuits are avoided, and standard synchronous
state assignment techniques can be employed. However,
it
turns out that not
all
hazards can be ignored. In all
transitions, the outputs are generated directly in response to
the inputs, and the local clock offers no hazard protection.
Thus the redundant cubes necessary in Huffman circuits
are also needed for the output logic, and special care must
be taken to avoid dynamic hazards
[
131. The local clock
generation logic may also contain similar hazards. Although
this signal is not directly seen by the environment,
a
hazard
on the clock lines could cause the state to change partially
or completely when no change was intended.
The locally clocked structure
as
presented
so
far cannot
use standard state encoding schemes, since
a
standard state
encoding can cause multiple state bits to change at
a
time. These state bits may then cause hazards in the local
HAUCK: ASYNCHRONOUS DESIGN METHODOLOGIES: AN OVERVIEW
I3
Authorized licensed use limited to: XILINX. Downloaded on October 8, 2009 at 03:39 from IEEE Xplore. Restrictions apply.
剩余24页未读,继续阅读
2021-08-27 上传
2021-09-14 上传
2023-09-05 上传
2014-05-12 上传
2019-10-07 上传
2007-05-08 上传
2022-01-10 上传
2023-12-27 上传
2022-09-23 上传

dila5cheng
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
