两帧深度排序:运动分割与通用运动视频的创新算法
需积分: 9 61 浏览量
更新于2024-11-06
收藏 546KB PDF 举报
本文主要探讨了一种新颖的视频处理技术——基于遮挡检测器的运动分割与深度排序方法。该研究发表在《Pattern Analysis and Machine Intelligence》杂志上,其标题为"Motion Segmentation and Depth Ordering Using an Occlusion Detector"。论文的作者是Doron Feldman和Daphna Weinshall,他们都是IEEE计算机学会的成员。
论文的核心内容分为两部分。首先,作者提出了一种利用空间-时间域的差分特性及尺度空间集成来进行运动分割的方法。这种方法旨在识别视频序列中不同运动区域的边界,通过分析帧与帧之间的运动差异来确定各个区域的动态特性。
接着,针对运动边界,文章设计了两种算法来处理两种和三种帧的深度排序问题。值得注意的是,该方法的一大创新之处在于仅依赖于两帧就能进行深度排序,这极大地简化了深度信息的计算过程。这种技术在处理一般运动场景下的六段实际视频序列时展现出良好的效果,表明其在实际应用中的实用性。
为了验证算法的鲁棒性,研究者还利用合成数据展示了对高噪声和光照变化的抵抗能力。此外,实验还包括了运动边界处无强度边缘存在的情况,以及无法用参数化运动模型描述的数据,这些测试都证明了算法的有效性。
论文的最后部分,作者通过心理物理学实验揭示了一个有趣的现象:人类,就像他们的算法一样,也能仅从两帧中推断出深度顺序,即使单帧中没有明显分层边界的视觉线索。这进一步强化了运动分割和深度排序在人类视觉认知中的作用,并暗示了其潜在的人机交互价值。
这项研究不仅提供了一种先进的计算机视觉技术,还在理论和实践上对运动分割和深度排序问题进行了深入探讨,对于视频分析、运动理解以及深度感知等领域具有重要的理论和应用意义。
3
(a) (b)
(c) (d)
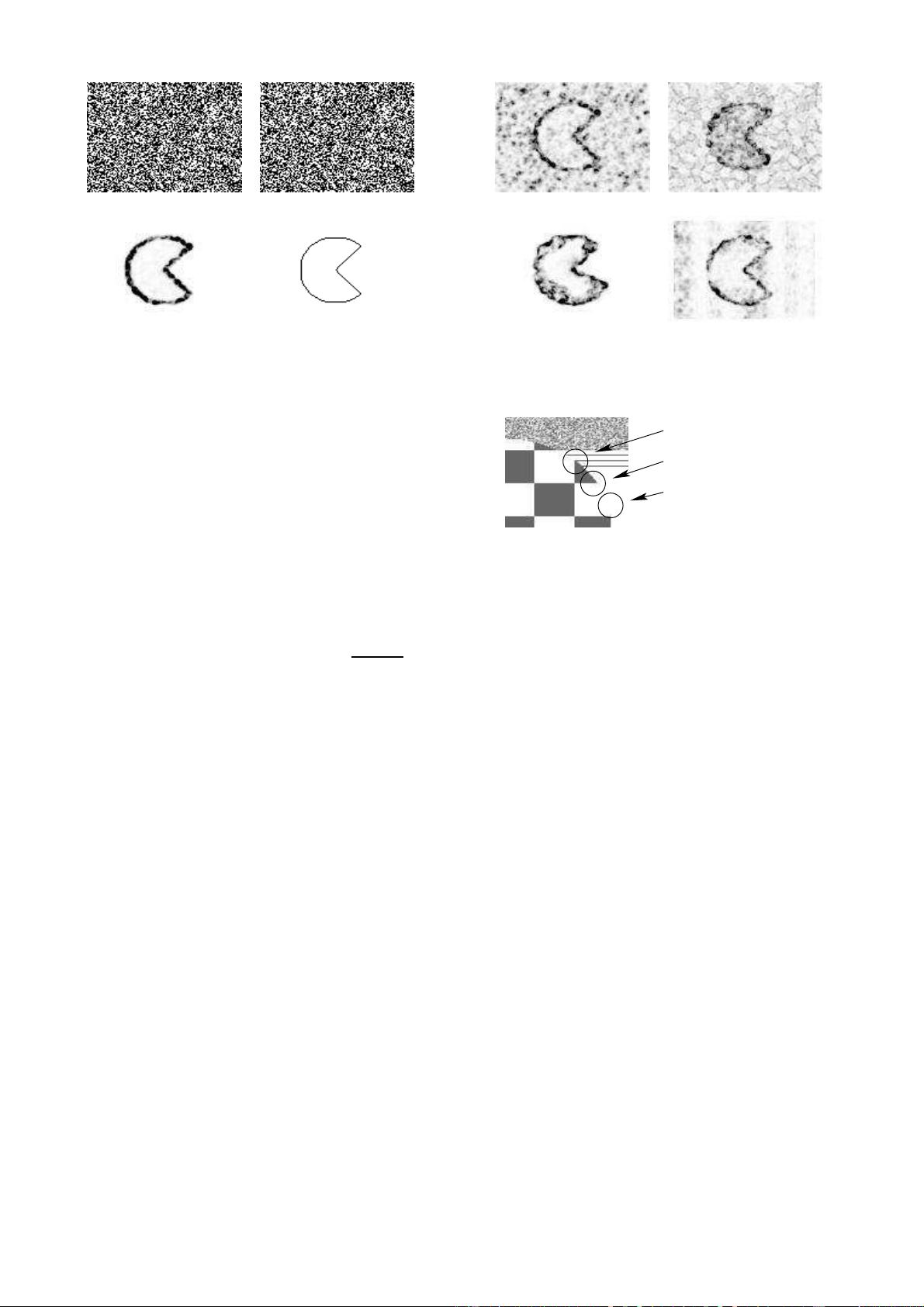
Fig. 1. Random dots example. A shape is moving sideways, where both
the shape and the background are covered by a random pattern of black and
white dots. It is impossible to identify the moving object from each of the two
frames (a) and (b) (a stereo pair) alone. The occlusion detector (c) (higher
values of λ are darker) shows the outline of the object very clearly. Compare
to the ground truth (d).
Velocity-adapted detector: Although rotational invariance is
desirable in the spatial domain, non-spatial rotations in the spatio-
temporal domain have no physical meaning. It is preferable to
have invariance to spatially-fixed shear transformations, which
correspond to 2D relative translational motion between the camera
and the scene. As suggested in [15] by the reference to Galilean
diagonalization, one can use the velocity-adapted matrix
˜
G given
by
˜
G =
G
11
G
12
0
G
21
G
22
0
0 0 λ
T
where λ
T
=
det(G)
det(G
∗
)
(3)
(G
ij
denote the entries of G, and G
∗
denotes the 2 ×2 upper-left
submatrix of G containing only spatial information).
Definition 2: The operator λ
T
is the velocity-adapted occlu-
sion detector.
To justify this definition, observe that
˜
G is also invariant to
translation and spatial rotation. The entry λ
T
is an eigenvalue of
˜
G, and it has been suggested that it encodes the temporal varia-
tion, being the “residue” unexplained by pure-spatial information.
In practice, λ
T
gives results similar to λ, though it has certain
advantages, as discussed in Section 4. Throughout this paper we
use λ to denote either operator, unless stated otherwise.
Detector effectiveness: High values of λ indicate significant
deviation from (2), which is often due to the existence of a motion
boundary. Other sources of large deviations include changes in
illumination (violation of the brightness constancy assumption),
or when the motion varies spatially (motion is not constant in ω).
However, often these events lead to smaller λ values as compared
with motion boundaries (see Fig. 2), in which case the boundary
response can be distinguished from a false response (e.g., by
thresholding).
Low values of λ do not necessarily indicate that the motion
in ω is uniform. The rank of G is affected by spatial structure
as well as temporal structure, so λ may be low even at motion
boundaries, when certain spatial degeneracies exist. Specifically,
this occurs when there is local ambiguity, i.e., when the existence
of a motion boundary cannot be determined locally. This includes
(a) (b)
(c) (d)
Fig. 2. False λ response. The same example as in Fig. 1: (a) with 20%
white noise; (b) with illumination change of 5%; (c) with the object rotating
by 20
◦
; (d) with both object and background patterns deformed smoothly.
linear background
uniform background
same−color background
Fig. 3. Areas where the λ detector is likely to give low values despite the
existence of a local motion boundary.
areas where the occluding object and its background are of the
same color, areas where the background is uniform in color, and
areas where the background texture is uniform in the direction of
the motion (Fig. 3). In the first case the rank of G is 0, and in
the other cases the rank of G may be 1 or 2, depending on the
appearance of the occluding object (recall that the λ detector is
high when the rank of G is 3). In these cases, the background
may be interpreted as part of the moving object, since no features
in the background appear to vanish due to occlusion.
2.2. Extraction of Motion Boundaries and Scale Space Structure
The response of λ to occlusion occurs only where some
background features become occluded. Clearly boundary location
cannot always be inferred on the basis of local information alone.
However, while there may be no cues to indicate the location of
the boundary at a fine scale, there may be enough information at a
coarser scale (i.e., in a larger neighborhood) and λ may respond.
Thus we incorporate a multi-scale element in our algorithm, in
order to detect motion boundaries that are not detectable at fine
scales.
Defining scale: In order to define the notion of scale in
our algorithm, note that the evaluation of λ involves Gaussian
convolutions in two different stages – during the estimation of
the partial derivatives, and when taking the average over the
neighborhood ω. In both cases, larger Gaussians lead to coarser
structures, and we refer to the size of the Gaussian as the scale.
In this work we only consider the spatial scale. As we show in
Appendix I, these two scales are related, and we define a unified
scale dimension, and a scaling-invariant operator λ
(s)
at any scale
s > 0, using scale-normalization.
剩余13页未读,继续阅读
103 浏览量
128 浏览量
2021-06-29 上传
2022-01-28 上传
2021-06-29 上传
2021-02-04 上传
2021-05-30 上传
121 浏览量

writeshadow
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
