IGH EtherCAT Master手册:Linux开源实现
"IGH EtherCAT manual,这是一份关于Linux开源EtherCAT主站igh的官方用户手册,由Dipl.-Ing.(FH) Florian Pose编写,详细介绍了IgH EtherCAT Master的特性和架构,以及应用接口、以太网设备、状态机等相关内容。"
《IGH EtherCAT手册》详细阐述了用于Linux平台的开源EtherCAT主站软件IgH EtherCAT Master的各个方面。该手册是了解和使用IgH EtherCAT Master进行 EtherCAT通信的重要参考资料。
1. **IgH EtherCAT Master**
- **特性总结**:手册在1.1章节中概述了IgH EtherCAT Master的主要功能,包括其高效的数据传输能力、灵活的配置选项和对EtherCAT协议的全面支持。
- **授权**:在1.2章节中,手册详细说明了软件的许可协议,提供了关于如何合法使用和分发软件的信息。
2. **架构**
- **主站模块**:2.1章节讨论了Master Module的设计,它是实现EtherCAT通信的核心部分,负责与从站设备的交互和数据交换。
- **主站阶段**:2.2章节解释了主站操作的不同阶段,如初始化、扫描、配置等,这些阶段构成了EtherCAT通信的生命周期。
- **过程数据**:2.3章节介绍了如何处理和管理EtherCAT网络中的过程数据。
3. **应用接口**
- **主站配置**:3.1章节详细说明了如何配置主站,包括设置从站配置和主站参数。
- **周期性操作**:3.2章节讲述了主站如何进行周期性的数据传输,这是实时控制的关键部分。
- **VoE处理程序**:3.3章节涵盖了值对象事件(Value Object Events, VoE)处理程序,它们处理设备状态的改变。
- **并发主站访问**:3.4章节讨论了在同一时间多主站访问网络的策略和处理方法。
- **分布式时钟**:3.5章节介绍了如何实现分布式时钟同步,这对于精确的时间同步至关重要。
4. **以太网设备**
- **网络驱动基础**:4.1章节为理解以太网设备的驱动工作原理提供了基础。
- **原生EtherCAT设备驱动**:4.2章节深入探讨了专为EtherCAT设计的设备驱动。
- **通用EtherCAT设备驱动**:4.3章节介绍了一种兼容多种设备的通用驱动方法。
- **提供以太网设备**:4.4章节解释了如何在系统中添加和管理以太网设备。
- **冗余**:4.5章节讨论了网络冗余技术,以提高系统可靠性。
- **以太网设备接口**:4.6章节定义了主站与以太网设备之间的接口规范。
- **修补原生网络驱动**:4.7章节提供了关于如何修改和适应现有网络驱动以支持EtherCAT的指导。
5. **状态机**
- **状态机理论**:5.1章节介绍了状态机的基本概念,为后续的理解提供了理论基础。
- **主站状态模型**:5.2章节详细描述了主站的状态模型及其工作原理。
- **主站状态机**:5.3章节阐述了主站状态机的结构和行为。
- **从站扫描状态机**:5.4章节分析了从站扫描过程的状态机。
- **从站配置状态机**:5.5章节讨论了配置从站时的状态机变化。
- **状态变更状态机**:5.6章节介绍了状态改变的管理机制。
- **SII状态机**:5.7章节涉及服务信息接口(Service Information Interface, SII)的状态机。
- **PDO状态机**:5.8章节讲解了过程数据对象(Process Data Objects, PDO)的状态管理。
手册涵盖了从基本概念到高级特性的广泛内容,为开发者提供了全面的指导,帮助他们理解和实现基于IgH EtherCAT Master的 EtherCAT通信解决方案。
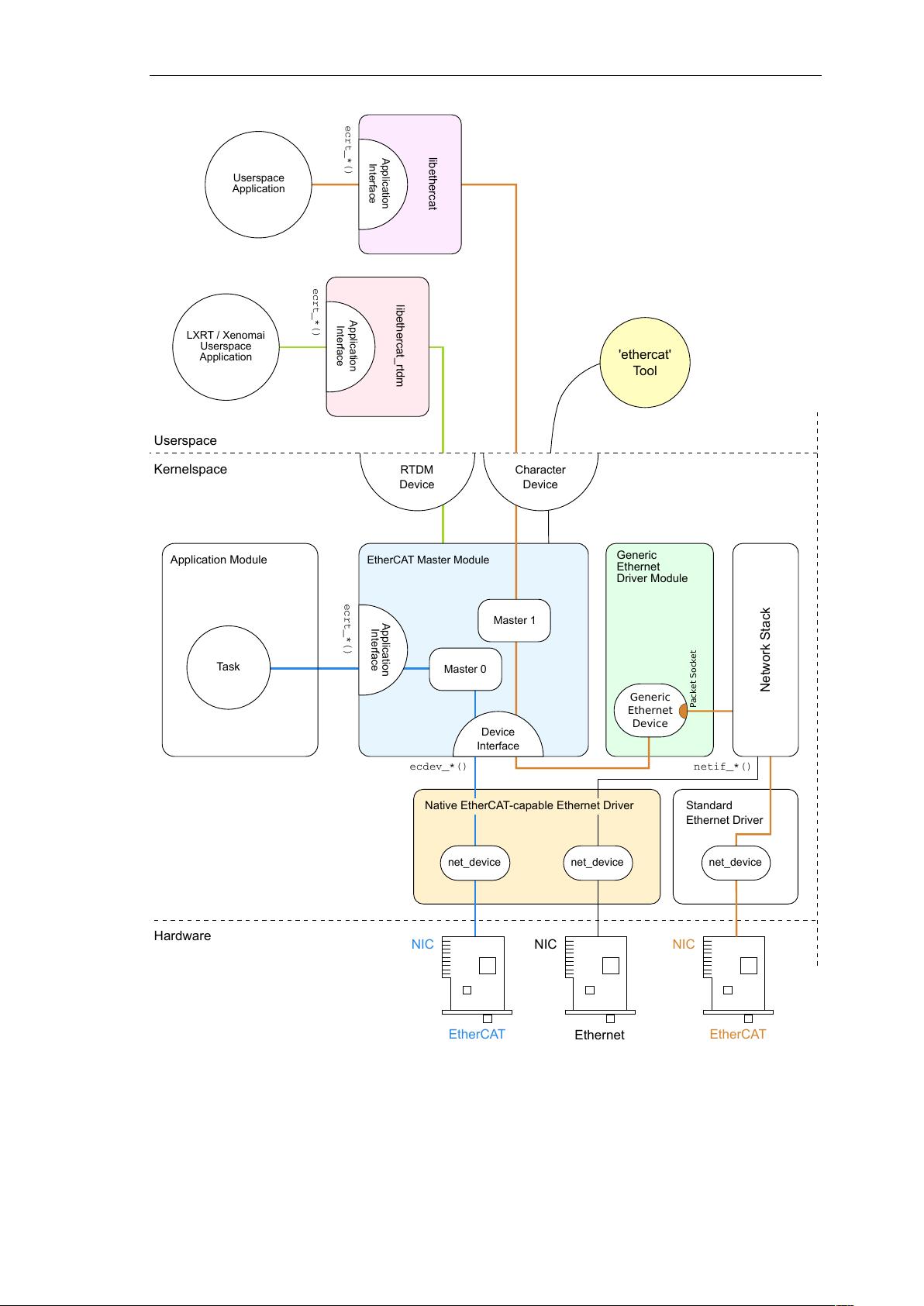
2 Architecture
ecdev_*()
EtherCAT Master Module
EtherCAT
Ethernet
NIC NIC
Hardware
ecrt_*()
Application Module
Task
Kernelspace
Userspace
ecrt_*()
netif_*()
Application
Interface
Generic
Ethernet
Driver Module
Standard
Ethernet Driver
NIC
RTDM
Device
'ethercat'
Tool
Character
Device
Device
Interface
Network Stack
net_devicenet_device
Native EtherCAT-capable Ethernet Driver
net_device
EtherCAT
Generic
Ethernet
Device
Packet Socket
Master 0
Master 1
ecrt_*()
Userspace
Application
libethercat
Application
Interface
LXRT / Xenomai
Userspace
Application
libethercat_rtdm
Application
Interface
Figure 2.1: Master Architecture
6 9149adda56ed, 2017/10/27



剩余95页未读,继续阅读
2019-07-20 上传
2018-08-03 上传
2019-10-16 上传
2022-07-13 上传
2023-07-12 上传
2023-04-20 上传
117 浏览量
2024-08-09 上传
2024-01-30 上传

weixin_37915486
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







